Matlab/Simulink環境下單電磁鐵懸浮系統的3種PID仿真
2014-06-27 05:46:20宋榮榮馬衛華
重慶理工大學學報(自然科學) 2014年1期
宋榮榮,馬衛華
(1.西南民族大學計算機科學與技術學院,成都 610041;
2.西南交通大學牽引動力國家重點實驗室,成都 610031)
Matlab/Simulink環境下單電磁鐵懸浮系統的3種PID仿真
宋榮榮1,馬衛華2
(1.西南民族大學計算機科學與技術學院,成都 610041;
2.西南交通大學牽引動力國家重點實驗室,成都 610031)
由于軌道不平順變化會對懸浮系統有影響,選擇適合于單電磁鐵懸浮系統的PID控制仿真方法是懸浮控制系統設計中的一個很重要的問題。基于單電磁鐵懸浮系統的數學模型,提出了3種PID控制仿真方法。利用Matlab/Simulink中的工具箱,通過仿真驗證了3種PID控制系統的可行性。結果表明:與方法1和方法2相比,基于S函數的方法3對軌道低頻振動能實現有效地跟蹤,且對軌道高頻振動具有較強的抑制能力。該研究成果為解決單電磁鐵懸浮系統的軌道不平順問題提供了一種較好的仿真方法。
單電磁鐵懸浮系統;軌道不平順;PID控制;Matlab仿真
如何克服軌道干擾是懸浮控制系統設計中的一個很重要的問題[1]。軌道的低頻和高頻干擾會導致單電懸浮系統的特性參數或結構發生改變,使控制系統品質指標無法保持在最佳范圍內[2-3]。控制效果的好壞取決于辨識模型的精確度,這對PID控制的仿真方法提出了更高的要求[4]。因此,有必要比較PID控制的不同仿真方法,從而選擇適當的仿真方法研究單電磁鐵懸浮系統的懸浮性能。
現有的仿真方法主要有采用狀態方程描述系統進行仿真、采用傳遞函數描述系統進行仿真、采用S函數描述系統進行仿真[5]。這些仿真方法各有利弊。其中,用S函數很容易表示復雜的被控對象及控制算法,特別適合于復雜系統的仿真。它允許采用C、C++、FORTRAN等語言進行編寫,結合了Simulink框圖圖形化的特點和Matlab編程靈活方便的優點,增強和擴展了Simulink的強大機制[6]。采用S函數仿真的也是近年來普遍采用的仿真方法之一[7-8]。
本文先建立單電磁鐵懸浮系統的數學模型;然后提出3種PID仿真方法;最后基于Matlab/ Simulink的工具箱,對軌道不平順進行仿真研究。研究結果表明:基于S函數的仿真方法對軌道干擾具有較好的抑制效果。
1 懸浮系統模型
單電磁鐵懸浮系統結構如圖1所示。假設電磁鐵不僅在垂直方向運動,還沿軌道以速度v運行。
圖1中:絕對氣隙z(t)為磁極表面與絕對參考平面的距離;h(t)為軌道面與絕對參考平面的距離;相對氣隙c(t)為磁極表面與軌道面的氣隙。加速度計所測得的輸出為加速度¨z(t);氣隙傳感器測得的輸出為相對氣隙c(t);i(t)為電流互感器測得的控制線圈電流;u(t)為繞組回路的電壓。
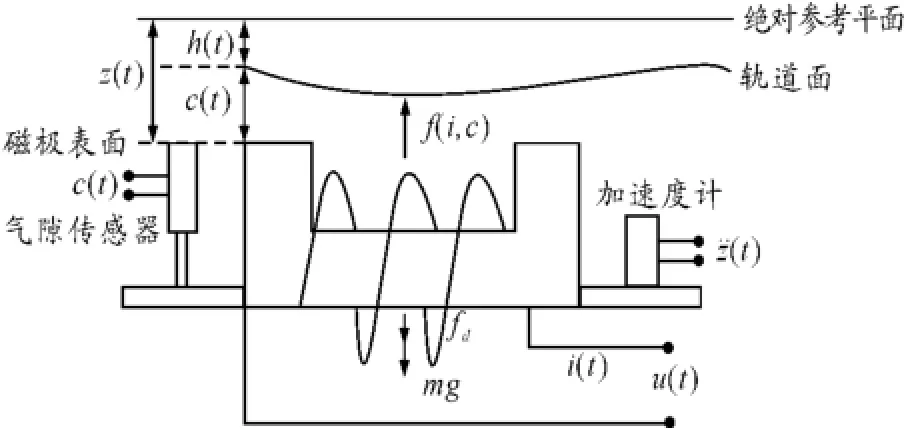
圖1 單電磁鐵懸浮系統結構
設N為電磁鐵線圈的匝數,A為磁極面積,R為線圈的電阻,μ0為空氣磁導率,mg為電磁鐵重力,F(i,c)為懸浮電磁力,fd(t)為外界干擾力。
在分析單電磁鐵懸浮系統的動力學模型時,假設[9]:①忽略漏磁的影響;②忽略磁鐵芯和導軌中的磁阻,磁勢均勻降落在氣隙c(t)上;③電磁鐵僅有垂直方向上的移動,其他方向受限無運動。
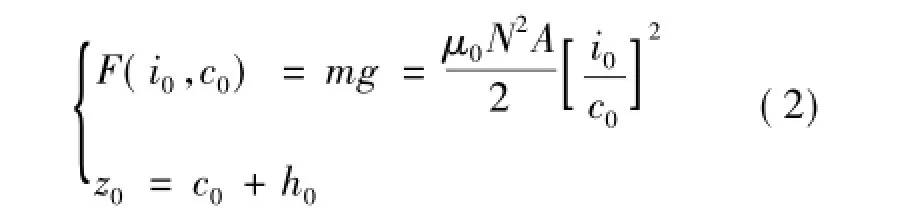
根據電磁學和動力學理論,得到基于絕對參考平面的單電磁鐵動態模型方程

其中,平衡點的邊界條件為
在平衡點(i0,c0)附近進行線性化處理,可以得到狀態方程


由勞斯(Routh)判據知:這是一個二階不穩定系統,為使電磁鐵穩定懸浮必須采取反饋控制。
2 3種PID控制仿真方法
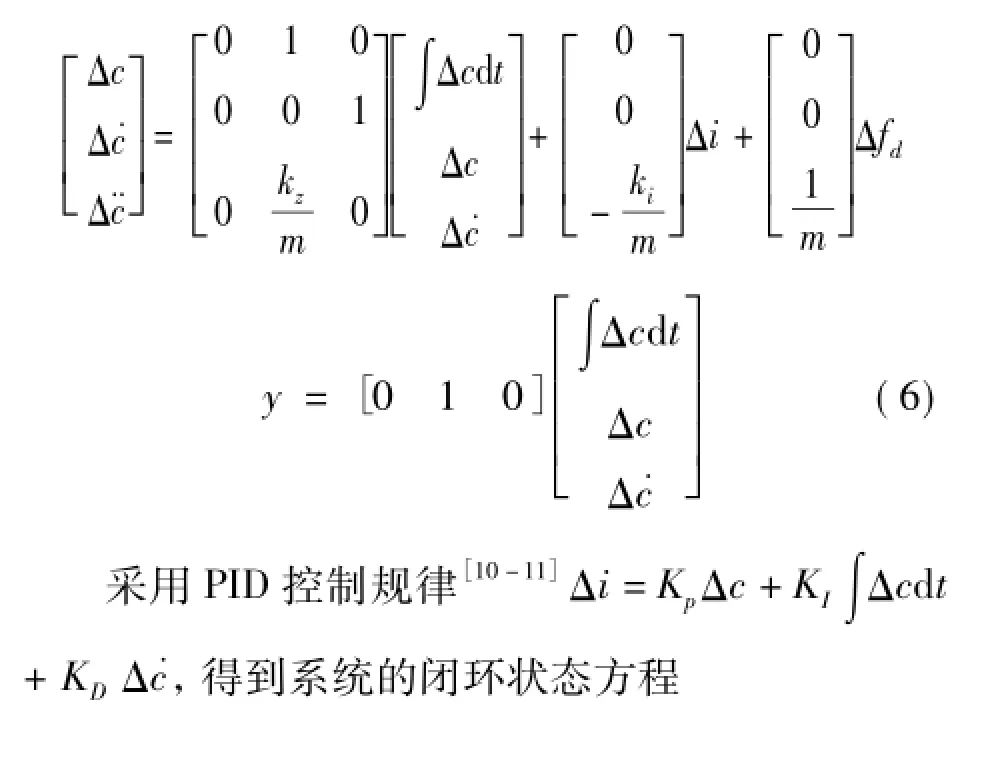
對系統方程(4)增加一個狀態變量∫c(t)d t,以電流為控制變量,則得到開環系統的狀態方程
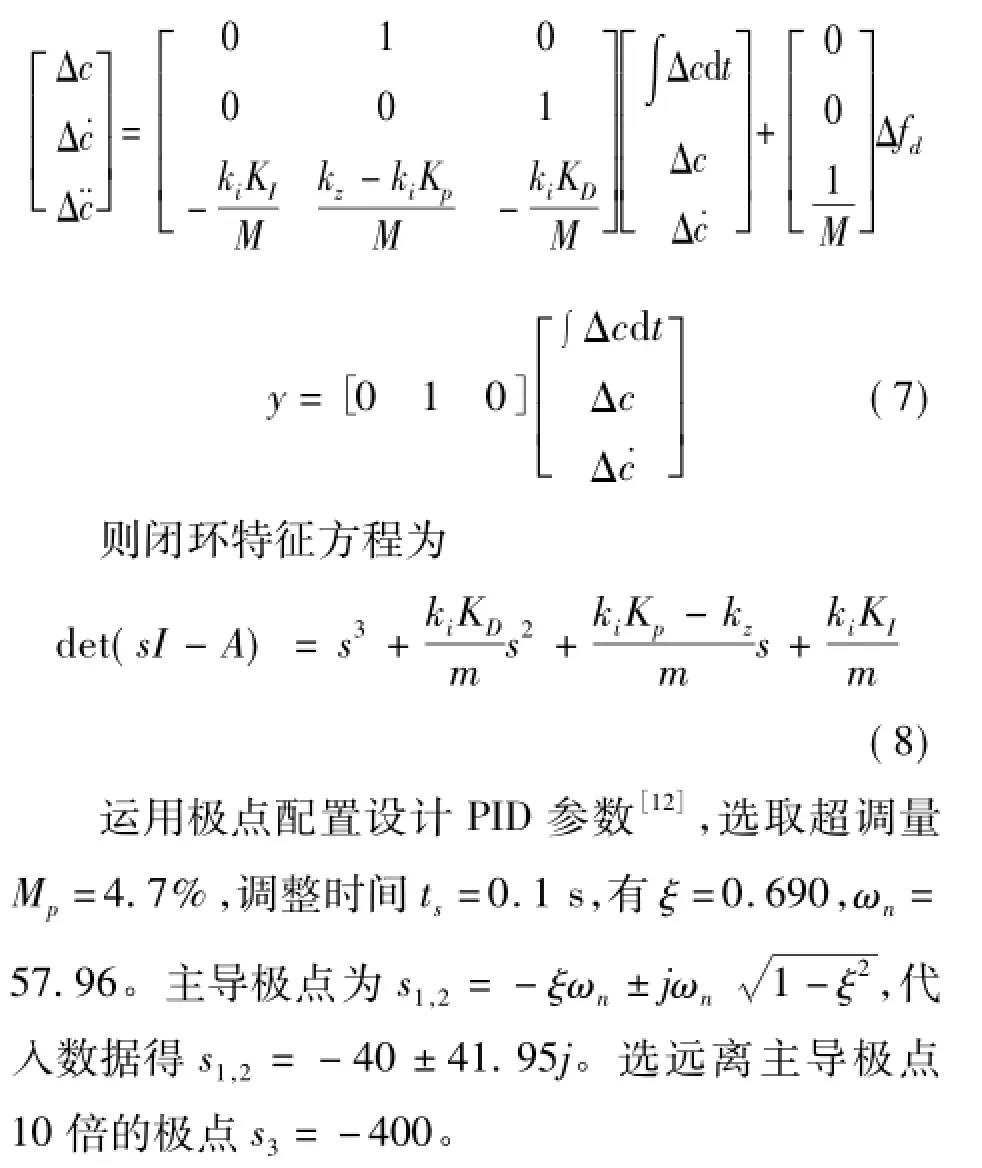
期望的閉環傳遞函數為

比較閉環特征方程(8)和期望的閉環傳遞函數(9),可求得參數Kp=19 638.65,KI=603 880.52,KD=215.68。
2.1 仿真方法1
采用傳遞函數描述被控系統,在Simulink下進行仿真。仿真結構如圖2所示。

圖2 PID控制的仿真結構1
PID控制器的內部結構如圖3所示。

圖3 PID控制器的內部結構
2.2 仿真方法2
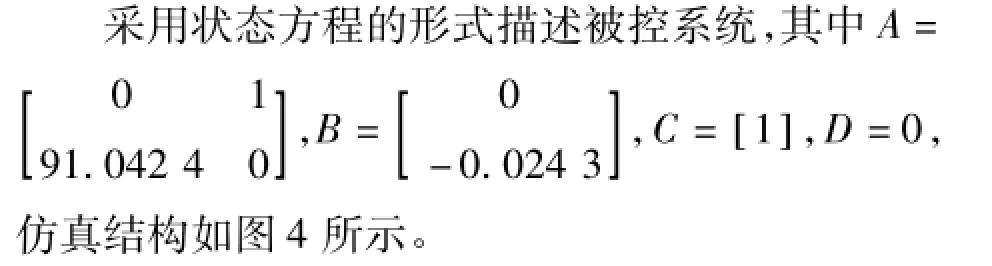

圖4 PID控制的仿真結構2
2.3 仿真方法3
采用S函數可實現在Simulink下復雜控制器和復雜對象的編程。本文利用S函數實現對被控對象的表達、控制的設計及仿真結果的輸出。
在S函數中,采用sizes結構進行初始化,選擇1個輸出,3個輸入分別為P、I、D。系統初始狀態為x(0)=0,˙x(0)=0。仿真結構如圖5所示。
3 M atlab仿真分析
計算機仿真軟件采用Matlab中的Simulink[13],驗證模糊自整定PID控制器的性能。單電磁鐵懸浮控制系統的參數如表1所示。

圖5 PID控制的仿真結構3

表1 單電磁鐵懸浮系統的參數
3.1 軌道低頻擾動的抑制性能
設軌道不平順的低頻擾動所對應的正弦波信號的幅值為5 mm,振動頻率為0.1 Hz。仿真結果如圖6(a)~(c)所示。
3.2 軌道高頻擾動的抑制性能
設軌道不平順的高頻變化所對應的正弦波信號的幅值為5 mm,振動頻率為10 Hz。3種仿真方法的仿真結果如圖7(a)~(c)所示。
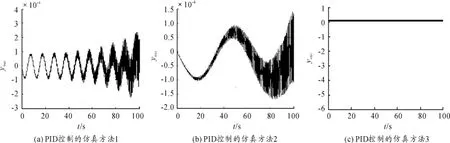
圖6 對軌道低頻擾動的跟蹤性能

圖7 對軌道高頻擾動的抑制性能
4 結論
由于單電磁鐵懸浮系統具有非線性特性,本文先建立該系統的狀態方程;然后以電流為控制量,設計3種PID控制仿真方法;最后,基于Matlab軟件進行驗證。結果表明:
1)由于軌道不平順對懸浮系統的影響,懸浮系統的控制性能對PID的控制參數有很強的依賴性。因此要克服軌道干擾,就必須選擇適當的仿真方法以獲得系統最佳的控制特性。基于S函數的仿真方法3可以準確地描述復雜系統和控制算法。
2)對于軌道的低頻擾動和高頻擾動,基于S函數的仿真方法與前2種仿真方法相比具有較強的抑制性能。上述結果表明:該仿真方法能夠更好地解決軌道不平順問題。
3)今后將考慮如何將仿真方法3和智能控制結合,更好地應用到磁懸浮控制中去,這是本研究的最終目的。
[1]張耿,李杰,楊子敬.低速磁浮軌道不平順功率譜研究[J].鐵道學報.2011,33(10):73-78.
[2]Zhiqiang Long,Guohua Shi,Lianchun Wang.Suspension influence analysis of track irregularity of maglev train[C]//Control and Decision Conference.[S.l.]:[s. n.],2010:942-947.
[3]Zheng Shubin,Lin Jianhui,Lin Guobin.Long-wave irregularity detection of high-speed maglev track[C]//Electronic Measurement and Instruments.[S.l.]:[s.n.],2007:277-281.
[4]ZhaiWanming,He Zhenxing,Song Xiaolin.Prediction of high-speed train induced ground vibration based on traintrack-ground system model[J].Earthquake Engineering and Engineering Vibration,2010,9(4):545-554.
[5]賈秋玲.基于MATLAB7.X/SIMULINK/STATEFLOW系統仿真、分析及設計[M].西安:西北工業大學出版社,2006.
[6]李穎,朱伯立,張威.Simulink動態系統建模與仿真基礎[M].西安:西安電子科技大學出版社,2004.
[7]任永峰,安中全,李含善.基于S函數的并網型交流勵磁雙饋電機風力發電系統研究[J].太陽能學報,2009,30(10):1401-1407.
[8]姚文冰,姚天任.語音編/解碼仿真中S函數的設計與應用[J].華中科技大學學報:自然科學版,2001,29 (5):83-85.
[9]謝云德,常文森.電磁型(EMS)磁懸浮列車系統鉛垂方向的建模與仿真[J].鐵道學報,1996,(4):47-54.
[10]陶永華.新型PID控制及其應用[M].北京:機械工業出版社,1998.
[11]欒軍山,陳華.Smith-模糊PID在過程控制中的應用[J].重慶理工大學學報:自然科學版,2010,24(7): 106-109.
[12]鄭大鐘.線性系統理論[M].北京:清華大學出版社,2002.
[13]張智星.Matlab程序設計與應用[M].北京:清華大學出版社,2002:360-365.
(責任編輯 劉舸)
Three PID Simulation of the Single M agnetic Levitation System Based on M atlab/Simulink
SONG Rong-rong1,MAWei-hua2
(1.College of Computer Science and Technology,Southwest University for Nationality,Chengdu 610041,China;2.State Key Laboratory of Traction Power,Southwest Jiaotong University,Chengdu 610031,China)
Due to the impact of the track irregularity on suspension system,selecting the suitably PID control simulationmethod for single electromagnet levitation system is a very important problem in the design of the suspension control system.In this paper,the mathematicalmodel of singlemagnet suspension system is based on PID control,and this paper puts forward three kinds of simulation methods.By using of Simulink toolbox in Matlab,the simulation verifies the feasibility of three kinds of PID control system,and the simulation results show that the third simulationmethod based on S function can more effectively realize the low frequency vibration of track,and have stronger suppression ability to the high frequency vibration of track,compared to the first simulationmethod and the secondone.In this paper,a better simulation method is provided for solving the single electromagnet levitation system of track irregularity problem.
singlemagnetic levitation system;track irregularity;PID control;Matlab simulation
TP13
A
1674-8425(2014)01-0007-05
10.3969/j.issn.1674-8425(z).2014.01.002
2013-09-27
西南民族大學中央高校專項資金資助項目(12NYZQN19);國家自然科學基金資助項目(51005190);四川省科技支撐計劃項目(2012GZ0103)
宋榮榮(1979—),女,博士研究生,副教授,主要從事泛函分析方面的研究。
宋榮榮,馬衛華.Matlab/Simulink環境下單電磁鐵懸浮系統的3種PID仿真[J].重慶理工大學學報:自然科學版,2014(1):7-11.
format:SONG Rong-rong,MA Wei-hua.Three PID Simulation of the Single Magnetic Levitation System Based on Matlab/Simulink[J].Journal of Chongqing University of Technology:Natural Science,2014(1):7-11.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
