諧振式微型管道機器人設計與實驗
2014-06-24 13:22:21李偉達
哈爾濱工程大學學報 2014年8期
關鍵詞:模型
劉 磊,李 娟,李偉達,秦 佳
(蘇州大學機電工程學院,江蘇蘇州215021)
諧振式微型管道機器人設計與實驗
劉 磊,李 娟,李偉達,秦 佳
(蘇州大學機電工程學院,江蘇蘇州215021)
針對直徑在18~30 mm范圍內的細小管道難以檢測的問題,提出一種微型機器人。該機器人采用諧振原理驅動,簡化了傳動機構。由微型電機帶動偏心輪旋轉作為激勵源,建立了機器人在管道壁約束下的數學模型,求解機器人柔性足與管壁碰撞產生的角加速度和接觸點位置,分析了機器人的運動機理。研制機器人樣機,并搭建管道試驗環境,進行速度和牽引力測試實驗。最小樣機尺寸15 mm×15 mm×22 mm,由實驗結果得出:樣機在8 V電壓下,速度最高可達到68.29 mm/s,功耗約為0.15 W,最大爬坡角度30°。
非線性振動;管道機器人;諧振驅動;結構設計
隨著現代高科技機械行業的快速發展,管道的建設和利用也得到了快速發展,尤其是在發電、制冷、航空、化工等行業,細小工業管道得到了普遍使用。但發展的同時,其弊端也不斷呈現,長年的介質腐蝕,機械振動以及制造缺陷的作用和影響,會導致管道產生裂紋,管壁減薄或破裂。定期檢查,及時發現缺陷及其擴展情況,并采取相應的修補或堵塞措施,是管道系統安全運行的重要保證[1]。傳統的管道檢測方法一般采用直接目視或用一些簡單的工具進行檢查,存在著不安全、破損不易發現、判斷不準確等諸多弊病。用機器人技術對細小管道進行檢查、診斷、維護等作業成為近來人們關注的熱點。哈爾濱工業大學研制了具有差動運動功能的管道機器人,該機器人在通過彎管時可根據管道環境利用三軸差動機構自動調節各驅動輪的轉速,從而提高機器人通過彎管時的運動柔順性,上海交通
大學開發了基于微型電機的腸道機器人,實現的機構本體蜷縮時尺寸為Φ13 mm×50 mm,能夠實現10 mm的軸向步距與8 mm的徑向變形。吉林大學陳西平等研制了一種諧振型壓電式管內移動機構,在壓電材料驅動下,機構發生諧振并在足端產生橢圓運動驅動機器人運動[2-7]。
傳統機器人結構復雜,小型化困難,受尺度效應影響小型化后運動效率急劇下降。難以適應微型管道的作業環境。采用諧振驅動可以避免復雜的傳動機構,易于小型化,同時驅動控制也較易實現。本文提出一種基于諧振驅動原理的管道機器 人,設計諧振式移動機構,介紹機器人的組成結構和運動原理。搭建相應的實驗平臺,對研制的樣機進行實驗研究。
1 建模與仿真分析
1.1 運動原理介紹
微型管道機器人結構如圖1所示,主要包括有微型電機、偏心輪、彈性支架組成的激勵源,節、前端蓋、后端蓋等結構件和覆蓋外表面的柔性纖毛(柔性足)等。微型電機帶動偏心輪旋轉,偏心輪的離心力激勵彈性支架產生振動;振動經殼體傳遞給柔性足;柔性足與管壁呈一定角度,在振動時其末端與管道壁發生碰撞和非對稱摩擦,當激勵頻率與系統動力學特性匹配時,機器人在柔性足的推動下產生運動,如圖2所示。

圖1 微型管道機器人樣機結構Fig.1 The structure of micro-pipe robot prototype
偏心輪轉動到下方時,通過支撐結構將振動能量傳遞給單向柔性足,機器人下端柔性足和管壁接觸,發生擠壓,摩擦力增大;上端柔性足與管壁間壓力減小,摩擦力減小,發生相對滑動。機器人本體向前移動。以此循環,由于柔性足的單向特性,柔性足與管壁在2個方向的摩擦系數不等,偏心輪旋轉引起柔性足在前進方向上摩擦力發生變化,所以引起機構向前運動。當激勵頻率在機器人固有頻率附近、柔性足與管壁間夾角適宜、增大激勵電壓,能實現管道機器人的最佳運動狀態。
機器人在管道內運行時輸出牽引力的大小和柔性足所受的正壓力、柔性足與管壁之間的摩擦因數有關。單向柔性足前后運動摩擦因數不同,電機旋轉時,上下兩端柔性足所受摩擦力相對改變,兩端摩擦力差值越大,機器人輸出牽引力越大。此外,當機器人遇到障礙或管道直徑微小變化時能夠實現一定程度的柔性調節。

圖2 機器人運動原理Fig.2 Theory of robot motion
1.2 柔性足的動力學模型
機器人物理模型圖3所示,截取機器人的一個環節,將機器人基體簡化為質量為m0的單一幾何體,取一對柔性足進行受力分析,柔性足和簡化基體的夾角為α,激勵源采用幅值為F0,頻率為f的正弦激勵。

圖3 機器人物理模型Fig.3 Physical model of the robot
離心力F0由微型電機帶動偏心輪旋轉產生,其方向背離旋轉軸心,在剖視圖中,離心力在y方向的投影為F0sin(ωt)。
簡化動力學模型如圖4所示,取O點為坐標原點,建立直角坐標系 Oxy。在 Oxy中,基體坐標A(x0,y0),上下柔性足端坐標分別為 B(x1、y1)和C(x2、y2),α為柔性足與管壁所成夾角,θi(i=1,2)為柔性足的角位移,柔性足長L,根據幾何關系,可得xi、yi方程:


圖4 簡化動力學模型Fig.4 Simplified dynamic model
用F0sin(ωt)表示系統的激勵,Fxi和Fyi為柔性足所受水平方向和豎直方向驅動力,FNi和Ffi表示足端與地面的法向與切向碰撞力,m0和m為基體和柔性足質量,Mi為扭簧i的扭轉力矩,利用達朗伯原理,可得兩端柔性足的動力學方程:


1.3 碰撞模型
柔性足與管壁的碰撞屬于斜碰撞,碰撞為機構提供了驅動力,但同時也必然改變柔性足的運動狀態,經典的瞬時碰撞模型不能處理存在摩擦的斜碰撞過程,也無法求得碰撞力。
假設碰撞發生時刻柔性足與管壁表面的接觸是點面接觸,碰撞過程中產生法向力和切向力,Hertz彈性碰撞理論可以用于描述此類碰撞的法向力。將地面約束簡化成彈簧模型,采用非線性彈簧阻尼模型,法向力可以表示為

其中基體的動力學方程為
式中:k為法相碰撞剛度;e為非線性指數;δ為壓縮量,以下端柔性足為例δ=y1
e、k為描述法向力的碰撞參數,無法直接測量,但是可以通過參數辨識的方法得到。
由于柔性足結構及碰撞過程的特殊性,難以直接測量碰撞力和足端運動參數的變化,因此本文給定系統的初始條件,通過測量碰撞發生后柔性足末端運動速度的變化與仿真計算結果進行比較,以二者誤差最小為目標,進行參數的分析與綜合,從而實現對碰撞模型的參數辨識。
靜態摩擦模型以Coulomb模型為代表,其計算量小、模型參數易于測量,在碰撞振動問題的研究中得到了廣泛應用[8-11]。在斜碰撞中,采用 Coulomb模型描述切向碰撞力,以下端柔性足為例:

由式(7)計算得到的摩擦力在相對速度的符號發生改變時會突變,仿真步長過小使計算無法進行。因此,可以采用反正切函數來近似模擬摩擦力的突變,即

式中:μ為摩擦系數,γ為摩擦力曲線形狀參數。
1.4 模型仿真分析
為了研究柔性足的動力學特性,并對其致動機理進行分析,依據以上的方程組,利用 MATLAB的Simulink工具箱建立系統的動力學模型。
取參數 L=0.012 m,m0= 0.01 kg,e= 2,m=0.000 8 kg,k=1×108N/m,α =60°,γ=10 000,F0=10 N,f=100 Hz,對上述模型進行數值仿真,得到發生碰撞的柔性足運動特性曲線如圖5所示。

圖5 柔性足角加速度、角度變化曲線Fig.5 The acceleration and angle curves of resonance foot
圖5(a)中機器人柔性足與管壁碰撞的角加速度在一定范圍內振蕩變化,變化趨勢和偏心輪轉動時傳遞給柔性足的激勵變化一致,最大角加速度約為θ¨
max≈600 rad/s2。圖5(b)顯示機器人柔性足角度變化曲線,初始狀態時柔性足與管壁夾角為α=60°,運動開始后柔性足的角位移θmax≈2.5°,由此可見,仿真模型的計算結果和理論中預期的機器人角加速度、相應的柔性足角度位置相符。
機器人樣機簡化模型仿真曲線如圖6~8所示,樣機在振動中柔性足和管壁碰撞產生切向力和法向力,驅動樣機前進。
圖6(a)為α=60°時,樣機在1.4、1.2、1 N不同激勵振幅下水平方向位移仿真曲線,由圖可見振幅越大,樣機水平方向上的運動速度越快,所以激勵振幅大小是影響機器人運動速度的因素之一。圖6(b)為α=60°時,樣機在120、100、80 Hz不同激勵頻率下水平方向位移仿真曲線,可見激勵頻率改變,機器人的運動速度也會發生變化,且仿真中頻率增大機器人運動速度也增大,可以預測120 Hz激勵頻率更接近機器人的固有頻率,所以激勵頻率也是影響機器人運動速度的因素之一。
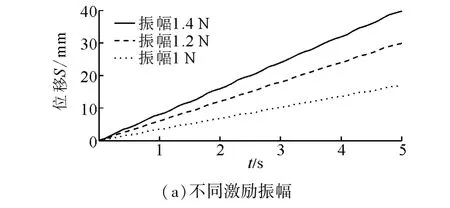
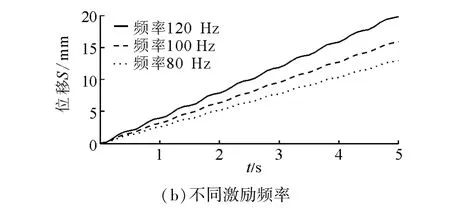
圖6 α=60°時不同激勵下樣機水平方向位移曲線Fig.6 The curve of different excitation prototype horizontal direction displacement when α=60°
圖7為樣機在運動過程中垂直運動方向上的位移仿真曲線,由圖可見豎直方向位移在平衡位置附近小幅震蕩,這是由于樣機在激勵源帶動下上下振動和柔性足與管壁碰撞時發生形變所致,與理論分析結果一致。

圖7 樣機豎直方向位移曲線Fig.7 The curve of prototype vertical direction displacement
圖8為α=85°時樣機水平方向位移仿真曲線,管道機器人在初始階段位移略有波動,隨后很快趨于穩定,樣機位移和運動時間基本成正比例關系。
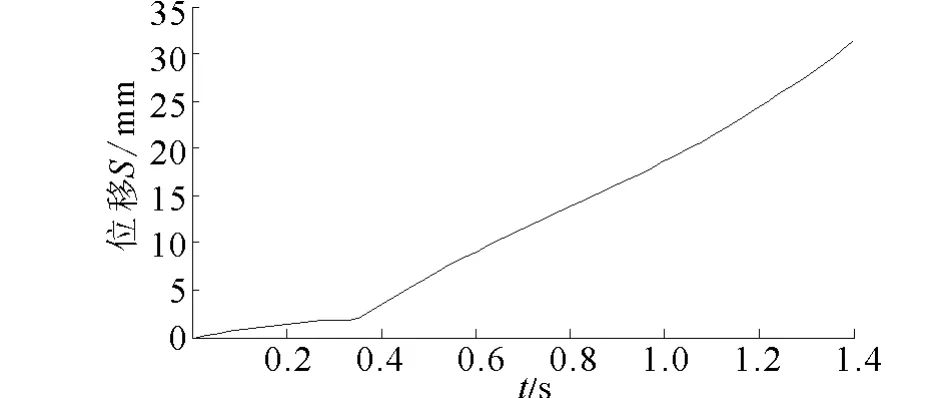
圖8 α=85°時樣機水平方向位移曲線Fig.8 The curve of prototype horizontal direction displacement when α=85°
2 樣機與實驗研究
機器人主體部分樣機機構設計如圖9所示,機器人采用節、端蓋、柔性足裝配方式,可用于批量化制作。在結構設計中節和端蓋裝配處含有內斜面,柔性足加工成梳齒狀,裝配在節與節、節與端蓋的內斜面縫隙處。以此確保柔性足的角度一致性。

圖9 樣機機構設計圖Fig.9 The design of prototype institutions
微型管道機器人樣機其激勵源采用低功耗、6mm空心杯微型直流電機。工作時將電機固定于特制的彈性支架中,利用微型電機帶動偏心輪轉動產生振動,微型電機式管道機器人樣機如圖10所示。

圖10 微型電機式管道機器人樣機Fig.10 The prototype of micro-motor pipe robot
對機器人樣機進行運動速度測定實驗,主要研究理論分析中柔性足角度和激勵振幅對樣機運動速度的影響。
樣機速度測試實驗原理如圖11所示,截取一段長度為100 mm的測試區間,在運動的起點與測試區之間有一段加速區,機器人運動到測試區時已經完成加速進入勻速運動過程。當機器人觸發左側光電傳感器開始計時,觸發右側傳感器則計時結束,測試區的長度除以計時時間為機器人的運動速度。

圖11 樣機速度測試實驗原理圖Fig.11 Experiment principle map of prototype speed testing
首先將激勵電壓幅值固定為8 V,改變柔性足角度(20°~90°),每個角度進行10組測試;然后將激勵電壓每次減小1 V,重復以上實驗過程,測得實驗數據。根據上述實驗數據,可得到柔性足與管壁不同角度下運動速度隨激勵電壓的變化曲線(如圖12(a))、和不同激勵電壓下運動速度隨柔性足角度的變化曲線(如圖12(b))。

圖12 速度變化曲線Fig.12 Speed curves
試驗結果表明直徑為 15 mm,最小長度為22 mm的管道機器人,激勵電壓為8 V,柔性足夾角為60°時運動速度最高,約為68.29 mm/s。
3 結束語
微小型管道機器人可攜帶微型照明、成像裝置和諸如濕度、溫度等多種微型傳感器,用以實現工業微型管道的檢測和修理。本文建立了管道機器人運動力學模型,對機器人運動機理進行了理論分析和實驗研究。實驗表明,激勵頻率、激勵振幅、柔性足與管壁間夾角均可影響機器人運動效果。機器人尺寸為15 mm×15 mm×22 mm,當激勵電壓為8 V,柔性足夾角為60°時,運動速度可達68.29 mm/s。采用諧振驅動原理有效提高了機器人的運動效率,減少了復雜的機械結構,可以使機器人在細小管道內靈活運動。本文的研究為微型機器人的后續研究奠定了基礎,對連續體型機器人在管道環境內的運動控制也具有一定參考意義.
在今后的研究中,還將集中于生物醫療等領域,如腸道內表面行走機理研究、基于諧振驅動原理的腸道內窺機器人研究和機器人結構改進等問題上,包括機器人的密封、發熱以及可靠性等。
[1]李鵬,馬書根,李斌,等.具有自適應能力管道機器人的設計與運動分析[J].機械工程學報,2009,45(1):154-161.
LI Peng,MA Shugen,LI Bin,et al.Design and motion analysis of an in-pipe robot with adaptability to pipe diameters[J].Journal of Mechanical Engineering,2009,45(1):154-161.
[2]唐德威,李慶凱,姜生元,等.具有差動運動功能的管道機器人設計與分析[J].機械工程學報,2011,47(13):1-8.
TANG Dewei,LI Qingkai,JIANG Shengyuan,et al.Design and analysis of a pipeline robot with the function of differential movement[J].Journal of Mechanical Engineering,2011,47(13):1-8.
[3]林蔚,顏國正,王志武,等.基于微型電機的腸道機器人機構設計[J].機器人,2011,33(3):319-323.
LIN Wei,YAN Guozheng,WANG Zhiwu,et al.Mechanism design of an intestinal robot based on micro-motor[J].Robot,2011,33(3):319-323.
[4]JUNGWAN P,TEAHYUN K.Development of an actively adaptable in-pipe robot[C]//Proceedings of the 2009 IEEE International Conference on Mechatronics.Malaga,Spain,2009:1-6.
[5]YUICHI N,YUKIHIRO S,SHIGEKI.Development of an inpipe micro mobile robot using peristalsis motion[J].Journal of Mechanical Science and Technology,2010(24):51-54.
[6]ZHAO Y X,HE G P,GAO D W,et al.Micro in-pipe robot mechanical structure design of shape memoryalloy driving[C]//Proceedings of the 2009 IEEE International Conferfence on Robotics and Biomimetics.Guilin,China,2009:360-365.
[7]陳西平,楊志剛,程光明,等.諧振型壓電式管內移動機構[J].吉林工業大學學報:工學版,2002,32(1):28-32.
CHEN Xiping,YANG Zhigang,CHENG Guangming,et al.On the in-pipe locomotive mechanism using resonance piezoelectric vibrators[J].Journal of Jilin University:Engineering and Technology Edition,2002,32(1):28-32.
[8]蔣振宇,李偉達,祝宇虹.一種諧振式微小型機器人移動機構[J].壓電與聲光,2010,32(4):625-628.
JIANG Zhenyu,Li Weida,ZHU Yuhong.A micro locomotion mechanism based on the resonance[J].Piezoelectrics&Acoustooptics,2010,32(4):625-628.
[9]孫立寧,李偉達,李滿天,等.基于碰撞力的諧振致動機理與試驗[J].機械工程學報,2010(9):12-18.
SUN Lining,LI Weida,LI Mantian,et al.Experiments and resonant locomotion principle based on impact force[J].Journal of Mechanical Engineering,2010(9):12-18.
[10]LIU P K,WEN Z J,LI J.A piezoelectric in-pipe micro robot actuated by impact drive mechanism[J].Optics and Precision Engineering,2008,16(12):2320-2326.
[11]EIGOLI A K,VOSSOUGHI G R.Dynamic modeling of stick-slip motion in a legged,piezoelectric driven microrobot[J].International Journal of Advanced Robotic Systems,2010,7(3):201-208.
[責任編輯:王亞秋]
Design and experiment of a micro in-pipe robot based on the resonance
LIU Lei,LI Juan,LI Weida,QIN Jia
(School of Mechanical and Electric Engineering,Soochow University,Suzhou 215021,China)
A micro robot is described in this paper that will conduct its work in a thin pipe with a small diameter in the range of 18 mm to 30 mm which is hard to detect.The robot is based on the resonant driving principle,which simplifies the transmission mechanism.Using an excitation source-the eccentric wheel is driven by a micro engine.A mathematical model of the robot in the pipe wall constraints was established to solve the angular acceleration caused by the collision between the robot's feet which are flexible enough with the pipeline wall,and the position of the contact points.The movement mechanism of the robot was also analyzed.The robot prototype was designed and a pipeline test environment was built to carry out the speed and traction testing.The minimum size of the prototype is 15 mm×15 mm×22 mm.The results show that:under 8 V voltage,the maximum speed of the prototype is up to 68.29 mm/s,the power consumption is about 0.15 W,and the maximum ramp angle is 30°.
nonlinear vibration;pipeline robot;resonant drive;structure design
10.3969/j.issn.1006-7043.201305066
TP242
A
1006-7043(2014)08-1002-06
http://www.cnki.net/kcms/doi/10.3969/j.issn.1006-7043.201305066.html
2013-05-23. 網絡出版時間:2014-06-17 15:39.
國家自然科學基金青年基金資助項目(61105106);江蘇省自然科學基金基礎研究計劃資助項目(BK2011379).
劉磊(1988-),男,碩士研究生;李娟(1978-),女,副教授,博士.
李娟,E-mail:lijuan@suda.edu.cn.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
