低慢小目標面陣推進式激光成像探測方法研究
2014-06-23 13:52:53李云霞韓曉飛
激光技術 2014年1期
關鍵詞:系統
李 達,李云霞,蒙 文,韓曉飛
低慢小目標面陣推進式激光成像探測方法研究
李 達,李云霞*,蒙 文,韓曉飛
(空軍工程大學信息與導航學院,西安710077)
為了解決空中低慢小目標探測存在“發現難、識別難、跟蹤難”的問題,提出了一種面陣推進式激光成像探測方法。采用面陣探測器對場景選通成像,通過車載成像系統的行進來實現多幀不同場景圖像的獲取,并運用一種特定的距離映射關系來實現對觀測場景的3維重構。以低空小型飛行物為目標,設計了成像探測系統的基本參量,并從激光二極管陣列單元、脈沖寬度與重復頻率、大氣衰減、信噪比和脈沖峰值功率等方面分析了成像探測系統的基本性能。結果表明,在低空范圍內,面陣推進式激光成像探測方法可有效對大面積空域進行快速3維成像,縮短圖像生成時間,為下一步的系統工程實現提供了理論和技術指導。
成像系統;激光主動成像;距離選通;對空探測
引 言
近年來,隨著各類航空突襲武器低空、超低空性能的不斷增強,空中低慢小目標機動化、輕巧化設計能力的提高,經常有各類低慢小目標突破雷達和地面防空火力網,直逼一些重要地面目標,給反空襲預警帶來嚴重的難題挑戰。利用激光探測技術對空中低慢小目標進行成像,可有效地對目標進行識別與判定,提高對低慢小目標的預警監視能力,為構建新型偵查探測網絡提供有力的支持[1-2]。
激光主動成像技術擺脫了以往探測成像技術的難題,具有體積小巧、適用范圍廣、抗干擾能力強、可在復雜背景條件下獲取目標圖像信息等的諸多優點[3]。與傳統雷達探測技術相比,激光主動成像技術具有極高的角度和速度分辨率,在城市周邊低空區域,可有效克服由于地物環境復雜而造成的接收系統易受地雜波和多徑效應等的影響,為實時、準確、可靠地提供預警情報信息配備了有力的探測手段。在激光探測成像過程中,通過激光束對目標區域進行照射,反射的光信號經探測器接收處理后,便可得到探測區域的強度像和距離像,再經過一定的圖像識別處理后,就可對目標進行特征判斷[4]。
目前,國內外利用激光成像技術探測空中低慢小目標還處于探索階段。對于傳統的點掃描激光成像方式,由于引入了掃描機構,不僅造成了成像速率慢、成像分辨率低,而且系統的體積和價格也隨之增加[5-6]。為此,在本文中,作者提出了一種面陣推進式激光成像探測模式,由面陣探測器實現對場景的選通成像,通過車載成像系統的行進實現多幀不同場景圖像的獲取,并運用一種特定的距離映射關系實現對觀測場景圖像的3維重構,快速、便捷地完成對空中低慢小目標的探測過程。
1 面陣推進式激光探測成像原理
面陣推進式激光成像探測模式是利用面陣探測器實現平面的2維成像,當車載成像探測系統移動搜索目標時,采用脈沖光源和距離選通的工作方式,由移動中的探測成像系統實現3維的推進掃描,圖1為面陣推進式激光成像示意圖。
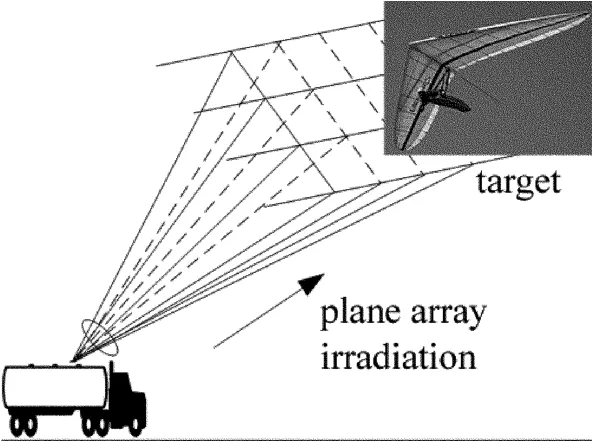
Fig.1 The schematic diagram of plane array propelled laser imaging detection
1.1光源照射模式選擇
在成像探測過程中,對探測目標可采用二極管陣列面陣照射或應用單個激光器泛光照射。當采用激光二極管陣列作為照明光源時,發射光束通過整形照明系統后,可得到與探測器圖樣相匹配的并行光束,光電探測器各像元接收各自視場內的回波脈沖,回波經光學接收系統采集處理后,通過光功能器件將具有時間信息的脈沖調制為光強信號,經過特定的距離映射處理就可得到所需要的距離信息。
當采用單個激光器的輸出光作為照明光源時,由于半導體激光器在快慢軸方向上的遠場發散角不同,可采用準直透鏡對光束在快慢軸方向上進行整形,以此來達到所要求的發散角和光束截面,反射的回波脈沖同樣經光學系統接收后,經處理便可得到探測場景的強度和距離信息。
由于不同的發射模式會對成像效果產生不同的影響,當采用泛光模式照射時,探測器各像元之間存在間隙,其光能利用率不如面陣照射模式。研究表明,在相同的距離和峰值功率條件下,面陣照射模式可獲得更高的信噪比;并且在相同測量精度的條件下,面陣照射模式比泛光照射模式需要更少的發射功率。因此,本文中選擇激光二極管陣列作為照明光源,采用面陣照射模式,并在此基礎上分析空中低慢小目標的探測過程。
1.2探測成像原理分析
當光學接收系統收到回波脈沖時,由于探測器接收到的回波信號包含光子飛行距離的時間信息,因此通過控制距離選通同步控制系統的延遲時間,計算激光脈沖Lp(t)和選通門G(t)的卷積就可得到探測器接收到的光強分布[7],其表達式為:
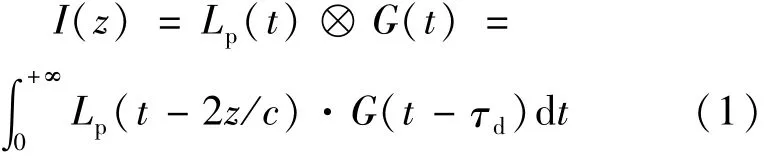
式中,接收端收到光子的強度-距離分布用I(z)表示,c為光速,z為探測距離,2z/c為光子往返傳輸所用時間,τd為選通門時延。由圖2計算分析可知,經過對矩形的卷積運算,面陣探測器可獲得線性良好的梯形光強-距離分布,梯形上下沿的斜坡展寬由發射激光脈沖寬度T決定,而頂部的平坦區寬度由發射激光脈沖寬度和選通門共同決定。當選通門寬度等于2倍的激光脈寬時,上下沿的斜坡展寬與頂邊寬度相等,設寬度為T的激光脈沖其等效曝光范圍為Δz,即Δz=cT,則探測器每接收到一個回波信號的有效梯形光強分布,其等效曝光范圍上的寬度為3Δz,也即表示產生一個景深為3Δz的圖像切片,其中光強分布的上下沿斜坡展寬與頂邊寬度均為Δz。
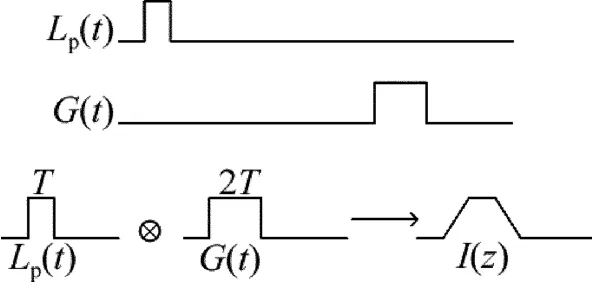
Fig.2 The signal profile of receiver obtained intensity vs.range
利用這一關系,通過控制車體的移動速度,使車載成像探測系統在前進的過程中,每次成像的位置距離上一次成像的位置相距為Δz,保持選通門延時τd不變,則探測器收到的相鄰梯形光強分布會產生重疊,圖3為3幅連續選通拍攝的相互重疊的強度-距離分布圖,其中zi表示接收到第i個回波的頂邊對應距離,即zi=τdc/2。利用重疊梯形斜坡邊沿良好的線性關系,通過簡單的分割就可以從頂邊得到探測目標的反射率信息,從斜坡的光強增益經過計算就可以得到目標的距離信息,圖3中,重疊區域[zi,zi+1]范圍內z′處的成像距離計算表達式為:
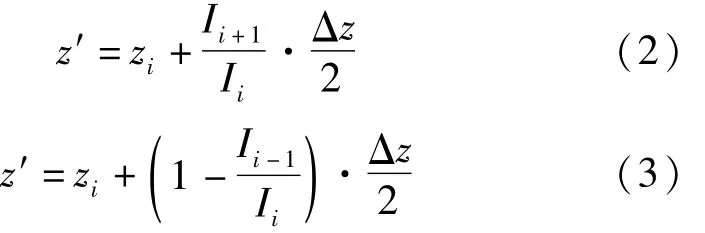
式中,Ii表示第i個圖像切片的強度-距離分布I(z)在距離點z′處的光強值,應用(2)式或(3)式即可算出重疊區域中各點處的相應距離,通過兩幅連續的圖像切片光強比值,就可得出所成像區域中各點的距離信息。因而可以看出,這種方法最少只需兩幅連續的圖像切片就可對探測圖像進行3維重構,同時獲得探測目標的強度像與距離像,可以大大減少后續圖像的處理量,改變以往需要通過上百張選通圖像來計算目標距離圖像的方法,縮短圖像生成時間,為后續的識別處理系統提供便捷。
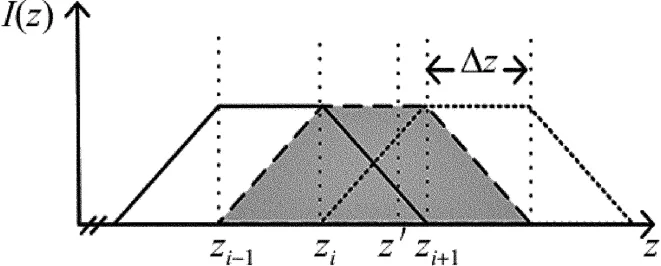
Fig.3 Overlapping intensity-range profile of successive range-gated images
2 面陣推進式激光成像系統分析
2.1系統成像工作過程
采用波長為808nm的半導體激光二極管陣列作為探測光源,激光束可包含多個獨立的不相關的小光束,形成能量均勻分布的激光光斑,其觸發電源可以與面陣探測器成像幀頻同步,這樣既可以在低功耗的情況下提高激光峰值功率,又能滿足探測器接收曝光時間的要求,且808nm激光波長恰好處在近紅外面陣探測器的響應峰值波長處,從而可以實現對低慢小目標探測的目的[8]。
以車載成像系統探測空中小型目標為例,為簡化模型分析,假設激光束中每一個小光束照射到目標上形成的光斑為矩形[9],承載成像系統的車輛沿空中目標方向直線行駛,圖4為照射光斑示意圖,每一個二極管陣列單元的光束發散角為α×β,光束相對地平面仰角為θ,空中小目標高度為h,探測距離為z=h/sinθ,則形成照射光斑參量見下。
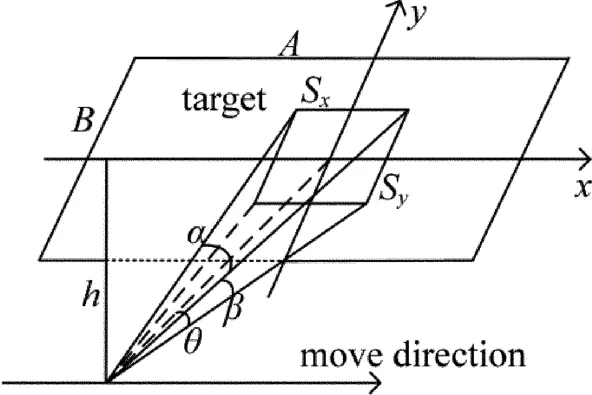
Fig.4 Diagram of laser cell array spot
光斑邊長:

光斑面積:

由上式分析可知,光斑面積的大小與探測距離、發散角及仰角有關,隨發散角和探測距離的增加而增加,但由于大氣損耗及激光器自身功率等的影響,光束會隨發散角和探測距離的增加而逐漸衰減,并且光斑過大導致的能量分散還不利于探測器對回波的接收,因而對這些因素需要折中考慮。當對面積為A×B的區域進行成像時,二極管陣列單元數假設為m×n,計算可得:
對空中目標進行探測時,結合實際條件對15m× 10m的區域覆蓋成像,當光束發散角為2mrad× 0.6mrad,相對地平面仰角45°,目標高度600m,由(6)式計算可得m=9,n=20,即最小需要的激光二極管陣列數為9×20。通過車載系統的行駛前進,使每次成像的覆蓋區域如圖3部分重疊,在得到兩幅以上的距離選通圖像之后,就可通過前面所述的距離映射關系實現對探測場景圖像的3維重構。
2.2激光二極管陣列脈沖寬度與重復頻率
當車載成像系統移動探測目標時,空中低慢小目標相對于成像系統行進緩慢,因此可假設被探測目標處于靜止當中,成像系統朝目標方向以速率v勻速行駛。由于系統每次成像的位置與前一次距離相差為Δz,利用這一關系,若要在空中廣闊區域中發現并識別低慢小目標,需控制激光器陣列對大面積空域進行推進式照射。假設車載系統行駛速率為v,對前方寬度為L的空域進行推進式覆蓋成像,則半導體激光器所需的脈沖重復頻率f為:

可以看出,當激光器陣列單元數目確定之后,脈沖重復頻率f隨車載系統的移動速率增加而增加,隨光源發散角的增加而減小。當車載系統以12m/s的速率、對寬度為500m范圍內的空域進行推進式成像時,其它參量同第2.1節,可得脈沖最小重復頻率為fmin=34Hz,取實際重復頻率fre=50Hz,對比掃描式激光成像系統所需的重復頻率(由kHz至MHz),可看出面陣推進式成像方法可以極大地降低對光源脈沖重復頻率的要求。
激光脈沖的寬度直接影響了成像區域的探測范圍,由第2.1節中的內容可知,系統單次脈沖成像時,需要對前方景深范圍為15m的區域照射成像,依據第1.2節中脈沖等效曝光范圍Δz=cT,可得脈沖寬度為T=50ns,成像景深范圍隨脈沖寬度的增加而增加。考慮脈沖實際寬度Tre與占空比Dre的要求(通常Tre·fre≤Dre,Dre<0.5%),可取Tre=200ns。
2.3探測距離仿真與分析
成像系統的探測、發現目標能力與多種因素有關,其性能分析主要針對系統的作用距離、信噪比和脈沖峰值功率等來進行。假定探測的物體表面具有朗伯反射率分布,且目標面積等于光束照射面積,由距離選通成像模型的激光雷達方程[10],面陣探測器接收到的激光功率為:

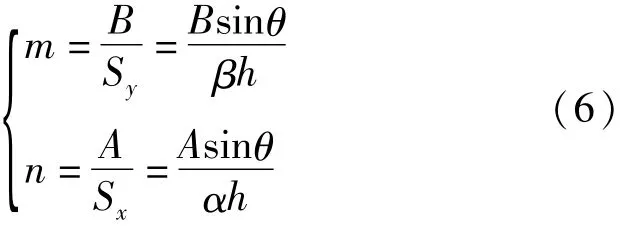
式中,Pt為激光器發射功率,ηt為發射系統光學效率,ηr為接收系統光學效率,ρ為反射率,φ為探測方向與朗伯表面法線夾角,Ar為探測器接收面積,z為探測距離,τatm為大氣單程傳輸透射率,τatm=exp(-σz),σ為消光系數,根據經驗公式可表示為:

式中,Vm是大氣能見度,q為修正因子[11]。圖5中給出了808nm的激光在不同大氣能見度傳輸時總透射率與探測距離的關系,可以看出,當天氣環境質量下降時,系統可探測距離急劇減少。由于低空區域易受揚塵、霧、霾等的干擾,要保證低空目標的有效成像,需著重考慮天氣條件變差時激光在傳輸過程中的衰減因素。
信噪比是評判系統優劣的重要指標,可以直觀地評價激光成像探測系統的性能,在設計系統時,以信噪比(signal-to-noise ratio,SNR)形式表示探測距離方程為:

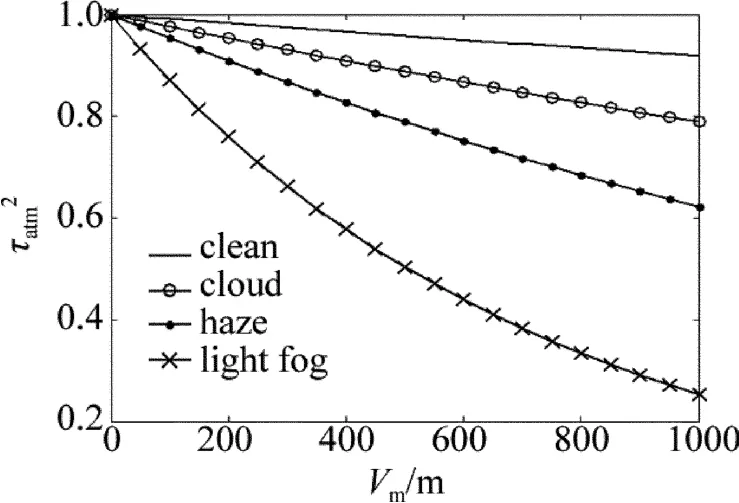
Fig.5 Two-way attenuation factor of808ns laser at different visibility
式中,PNEP為噪聲等效功率,D為探測器接收孔徑。假設系統的各項參量為:發射和接收系統光學效率ηt=ηr=0.8,接收孔徑D=0.07m,噪聲等效功率PNEP=10-8W,根據空中低慢小目標的探測特征,取反射率ρ=0.11,光束與目標表面法線夾角φ=45°。在能見度為5km的條件下,圖6中給出了不同最小峰值功率條件下系統信噪比與探測距離的關系曲線,可以看出,隨著探測距離的增大信噪比在迅速降低,當要求成像距離為1000m,SNR達到20dB時,二極管發射單元峰值功率最小為20W。
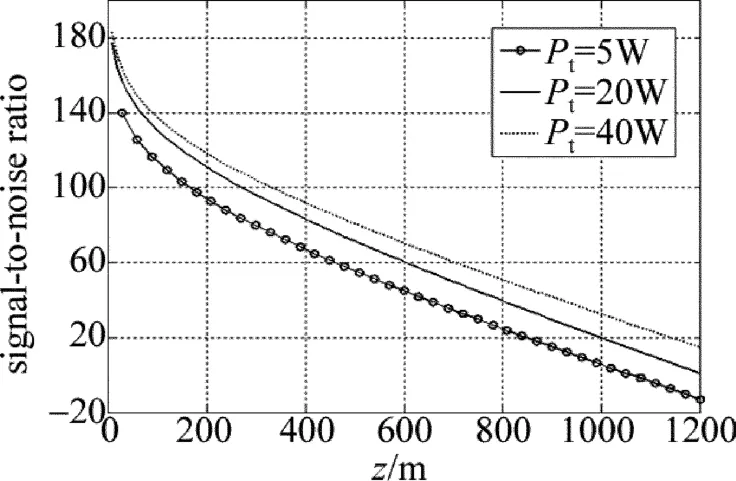
Fig.6 Relation between SNR and detection range
3 結 論
針對目前城市空防中低慢小目標的難點問題,作者提出了一種面陣推進式激光成像探測模式,基于激光距離選通成像技術的基本原理,分析了面陣推進式激光成像探測系統的工作過程,設計了系統的基本能參量并對其性能作了分析。與傳統的掃描成像探測技術相比,該方法有效減少了圖像處理運算過程,生成3維圖像方式簡單,具有實時快速成像的優點,為下一步的系統工程實現提供了理論和技術指導。
[1] CHEN YW,ZHANG L,HU Y H,et al.Array detection technology of echo on earth observation laser imager[J].Journal of Infrared and Millimeter Waves,2004,23(3):169-171.
[2] KUNZG J,BEKMAN H H P T,BENOIST KW,et al.Detection of small targets in a marine environment using laser radar[J].Proceedings of SPIE,2005,5885F:1-17.
[3] HAN HW,ZHANG X H,GEW L.A variable step scan method for underwater range-gated imaging[J].Laser Technology,2011,35(2):226-229(in Chinese).
[4] KAMEYAMA S,IMAKIM,TAMAGAWA Y,et al.3-D imaging LADAR with linear array devices:laser,detector and ROIC[J].Proceedings of SPIE,2009,738209:1-8.
[5] CAI X P,LIH M,LIU JB,et al.Overview of active optical three-dimensional imaging technology[J].Laser&Infrared,2006,37(1):22-25(in Chinese).
[6] ZHANG Y Y,LIU JS,LID Y.Design of laser imaging radar for air detection[J].Opto-Electronic Engineering,2008,35(1):36-39(in Chinese).
[7] PIERRE A.Long-range three dimensional imaging using range-gated laser radar images[J].Optical Engineering,2006,45(3):034301.
[8] FAN B H,ZHAOCh M,JIR Y.Research on technology of scannerless laser active imaging guidance[J].Semiconductor Optoelectronics,2008,29(3):426-429(in Chinese).
[9] BLANQUER E.Ladar proximity fuze-system study[D].Stockholm,Sweden:Royal Institute of Technology(KTH),2007:24-26.
[10] HU Ch Sh.Investigation into the high-speed pulsed laser diode 3D-imaging ladar[D].Changsha:National University of Defense Technology,2005:24-26(in Chinese).
[11] LIU X Ch,GAO T Ch,LIU Zh T.Effect of atmospheric aerosols on laser transmission attenuation[J].Journal of Atmospheric and Environmental Optics,2012,7(3):181-190(in Chinese).
Research of p lane array propelled laser imaging detection for small targets at low altitude and slow speed
LI Da,LI Yunxia,MENG Wen,HAN Xiaofei
(School of Information and Navigation,Air Force Engineering University,Xi’an 710077,China)
In order to solve the difficult problem of finding,identifying and tracking a low altitude,slow speed small target,a new technology of array propelled laser imaging method was proposed.With range-gated imaging model,different images of the scene were obtained by the moving forward vehicle system.According to the principle of plane array propelled imaging method,a 3-D reconstruction calculation about the successive range-gated images was introduced.Aiming at the characteristics of a low altitude,slow speed small target,the basic parameters of imaging detection system were designed.The performance of the system was studied including array elements,pulse repetition frequency,pulse duration,atmospheric attenuation and signal to noise.The results show that in low-flying area,this technology can be used to quickly imaging for 3-D observation scene,shortening the time required for images generation and could provide a guideline for the future system realization.
imaging system;laser active imaging;range-gated;air detection
TN247
A
10.7510/jgjs.issn.1001-3806.2014.01.010
1001-3806(2014)01-0044-05
李 達(1989-),男,碩士研究生,主要從事激光成像技術的研究。
*通訊聯系人。E-mail:liyunxia_lyx@126.com
2013-03-16;
2013-05-16
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
