含摩擦的雙電機(jī)伺服系統(tǒng)快速終端滑模控制
2014-06-06 03:06:52任雪梅
哈爾濱工業(yè)大學(xué)學(xué)報(bào) 2014年3期
關(guān)鍵詞:模型
趙 威,任雪梅
(北京理工大學(xué)自動(dòng)化學(xué)院,100081 北京)
含摩擦的雙電機(jī)伺服系統(tǒng)快速終端滑模控制
趙 威,任雪梅
(北京理工大學(xué)自動(dòng)化學(xué)院,100081 北京)
針對(duì)含LuGre穩(wěn)態(tài)摩擦力的雙電機(jī)伺服系統(tǒng),通過引入含速度項(xiàng)的指數(shù)函數(shù),提出一種連續(xù)可微的LuGre穩(wěn)態(tài)摩擦模型,解決了原有模型不可微的缺點(diǎn),該模型能夠有效刻畫Stribeck現(xiàn)象、庫(kù)倫摩擦、粘滯摩擦等多種摩擦特征;為了進(jìn)一步解決系統(tǒng)的同步和跟蹤問題,基于該連續(xù)可微摩擦模型,引入表征同步率的可變系數(shù)設(shè)計(jì)了可變系數(shù)的快速終端滑模控制器,并運(yùn)用Lyapunov方法證明了在給定控制律下,系統(tǒng)能夠?qū)崿F(xiàn)先同步控制后跟蹤控制.仿真結(jié)果表明提出的控制方法具有快速收斂速度和高跟蹤精度.
雙電機(jī)伺服系統(tǒng);快速終端滑模;連續(xù)LuGre摩擦模型;跟蹤控制;同步控制
隨著控制精度要求以及控制過程復(fù)雜性的提高,多電機(jī)系統(tǒng)控制算法的設(shè)計(jì)日益復(fù)雜.由于存在摩擦等非線性因素的影響,如何設(shè)計(jì)控制器保證電機(jī)的高精度跟蹤和同步控制已經(jīng)成為一個(gè)熱點(diǎn)問題.
摩擦是伺服系統(tǒng)中普遍存在的一種非線性現(xiàn)象,它對(duì)系統(tǒng)產(chǎn)生許多負(fù)面影響,影響了閉環(huán)系統(tǒng)的性能,尤其在低速運(yùn)行時(shí)更明顯.由于LuGre模型能夠很好地描述復(fù)雜摩擦現(xiàn)象,許多學(xué)者致力于LuGre摩擦的建模和補(bǔ)償控制研究.Muvengei等[1]和Wang等[2]分別研究LuGre摩擦模型的建模以及參數(shù)識(shí)別方法.在摩擦補(bǔ)償方面,文獻(xiàn)[3-4]提出了基于觀測(cè)器的摩擦補(bǔ)償算法,并證實(shí)了觀測(cè)器可以消除摩擦的影響并能有效改善控制精度.向紅標(biāo)等[5]采用基于LuGre模型的 Backstepping方法設(shè)計(jì)自適應(yīng)摩擦補(bǔ)償控制器.本文在此基礎(chǔ)上,提出一種連續(xù)可微的摩擦模型代替LuGre穩(wěn)態(tài)摩擦,來解決原模型不可微的缺點(diǎn).
此外,由于控制精度要求的不斷提高,電機(jī)的快速高精度控制也成為許多學(xué)者關(guān)注的熱點(diǎn).Wang等[6]設(shè)計(jì)了基于零相位誤差跟蹤控制器,提高電機(jī)系統(tǒng)的魯棒性能以及頻率響應(yīng)性能.Liu等[7]基于誤差反向傳播神經(jīng)網(wǎng)絡(luò)提出主動(dòng)擾動(dòng)抑制控制算法,提高了系統(tǒng)性能.Zhang等[8]提出一種方法實(shí)現(xiàn)多個(gè)電機(jī)速度同步并保證電機(jī)同步速度在一個(gè)可控的范圍.文獻(xiàn)[9-10]分別將H∞理論以及BP神經(jīng)網(wǎng)絡(luò)與滑模控制方法結(jié)合設(shè)計(jì)控制器,從而保證快速跟蹤性.以上文獻(xiàn)只單獨(dú)考慮跟蹤或同步問題,而這兩個(gè)問題同等重要.因此,本文設(shè)計(jì)可變系數(shù)的快速終端滑模控制器,來達(dá)到先同步后跟蹤的控制目的.
考慮含有LuGre穩(wěn)態(tài)摩擦的雙電機(jī)伺服系統(tǒng),提出連續(xù)可微LuGre穩(wěn)態(tài)摩擦模型,并考慮滑模控制高精度和魯棒性的特點(diǎn),在原有滑模控制基礎(chǔ)上引入表征同步率的可變系數(shù),提出了一種基于可變系數(shù)的快速終端滑模控制策略,從而達(dá)到快速同步和高精確跟蹤的控制目的.
1 模型構(gòu)建
考慮雙電機(jī)伺服系統(tǒng)模型如下:
式中:θi(i=1,2)和θm分別表示電機(jī)和負(fù)載的轉(zhuǎn)角(i=1,2)和分別表示電機(jī)和負(fù)載的轉(zhuǎn)速;J表示電機(jī)的轉(zhuǎn)動(dòng)慣量;Jm表示負(fù)載的轉(zhuǎn)動(dòng)慣量;ui是系統(tǒng)輸入轉(zhuǎn)矩;ω是偏置力矩;τi代表電機(jī)和負(fù)載之間傳輸力矩;fi和fm分別表示與電機(jī)轉(zhuǎn)速和負(fù)載轉(zhuǎn)速有關(guān)的LuGre穩(wěn)態(tài)摩擦力矩.
為了解決原有LuGre穩(wěn)態(tài)摩擦模型不連續(xù)且不可微缺點(diǎn)對(duì)控制器設(shè)計(jì)造成的不便,用連續(xù)可微函數(shù)式(2)代替原有摩擦項(xiàng):
式中:v代表轉(zhuǎn)速,Λ =2/(1+e-γv)-1,γ > 0,且γ的大小影響到F(v)與LuGre穩(wěn)態(tài)摩擦模型間的擬合誤差,γ的取值越大,擬合精度就越高,如圖1所示,該連續(xù)可微模型能夠有效刻畫庫(kù)倫摩擦(A項(xiàng))、Stribeck現(xiàn)象(B項(xiàng))以及粘滯摩擦(C項(xiàng))的摩擦特征.
將所提出的連續(xù)可微函數(shù)式(2)代入伺服系統(tǒng)模型(1)中可得新的系統(tǒng)模型為
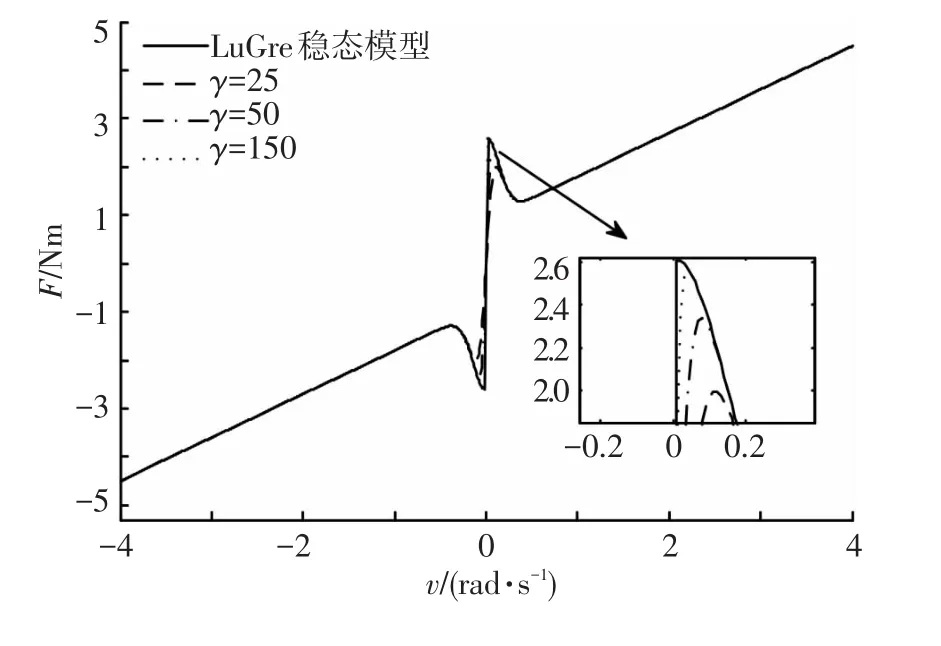
圖1 連續(xù)LuGre穩(wěn)態(tài)模型
基于系統(tǒng)模型(3),假設(shè)系統(tǒng)傳動(dòng)比是1,且齒隙為2α.因?yàn)辇X隙具有非線性特性,所以傳輸力矩τi(t)可表示為

式中k和c分別表示扭矩系數(shù)和阻尼系數(shù),并且死區(qū)函數(shù)f(zi(t))定義為
由于死區(qū)的非線性不利于設(shè)計(jì)控制器,因此我們運(yùn)用如下的光滑、連續(xù)、可微的函數(shù)來代替死區(qū)函數(shù)

那么,傳輸力矩τi(t)可改寫為
其中r>0.
為了便于設(shè)計(jì)控制器,選擇 x1,x2,x3i,x4i為狀態(tài)變量
并且 τi(t)=kx3i+cx4i.
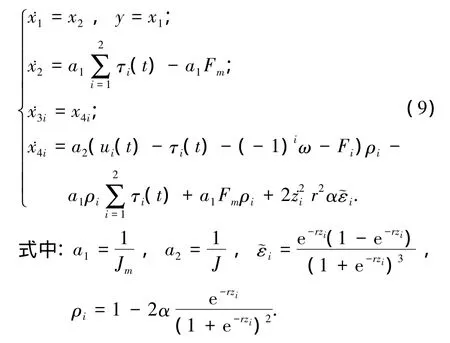
于是,狀態(tài)方程可表示為
本文主要目的是設(shè)計(jì)相應(yīng)的快速終端滑模控制器,使系統(tǒng)輸出精確跟蹤參考信號(hào)并完成2電機(jī)之間的同步控制.下面,我們對(duì)這個(gè)方面進(jìn)行詳細(xì)介紹.
2 控制器設(shè)計(jì)
為了確保系統(tǒng)輸出能夠精確跟蹤參考信號(hào),研究跟蹤誤差e(t)=y(t)-yd(t)的穩(wěn)態(tài)性能.通過簡(jiǎn)單的推導(dǎo),可得下列等式
定義快速終端滑模為
式中:pi> qi是正奇數(shù),而 αi> 0,βi> 0.
為了能夠達(dá)到跟蹤與同步控制的目的,本文引入一個(gè)表征同步程度的可變系數(shù),將原有滑模控制分為兩部分,即保證速度同步部分usi和不能速度保證同步部分uti.
基于連續(xù)LuGre穩(wěn)態(tài)摩擦模型,控制量ui可表示為
這里,b>0,并且η是一個(gè)足夠大的正常數(shù),而 h1(x3i,x4i)為系統(tǒng)的狀態(tài)反饋項(xiàng),h1(x3i,x4i)=為滑模項(xiàng),且
可變系數(shù)ψ反映兩電機(jī)轉(zhuǎn)速的同步程度,當(dāng)兩電機(jī)轉(zhuǎn)速差較大時(shí),ψ變小,保證速度同步部分的控制量usi起主要作用,兩電機(jī)逐漸達(dá)到同步狀態(tài);當(dāng)轉(zhuǎn)速差較小時(shí),ψ趨近于1,控制量變?yōu)樵械幕8櫩刂疲瑥亩瓿筛櫮康模虼诉x擇合理的η,能夠保證系統(tǒng)達(dá)到先同步后跟蹤的目的.
以下,將對(duì)整個(gè)系統(tǒng)的穩(wěn)定性進(jìn)行分析.
定理1 考慮狀態(tài)方程(9),控制率由式(14)~(17)給出,那么兩電機(jī)的轉(zhuǎn)速將會(huì)達(dá)到同步,并且跟蹤誤差e一致收斂.
證明 通過兩個(gè)步驟對(duì)整體的穩(wěn)定性進(jìn)行證明,即兩電機(jī)同步穩(wěn)定性和輸出跟蹤穩(wěn)定性.
首先,選擇以下Lyapunov函數(shù)證明兩電機(jī)同步穩(wěn)定性,

對(duì)式(18)進(jìn)行求導(dǎo),并將式(3)代入可得

其中δ=ut1-ut2.
由于式(22)右端函數(shù)是有界函數(shù),這里假設(shè)該函數(shù)上界為σ,那么當(dāng)且僅當(dāng)η≥σ時(shí)電機(jī)能夠達(dá)到同步.
下面選取另一個(gè)Lyapunov函數(shù)證明跟蹤誤差的穩(wěn)定性.

對(duì)式(23)求導(dǎo)并將控制量代入得
由上述推導(dǎo)可得,在控制率ui的作用下,系統(tǒng)能夠達(dá)到同步,并且跟蹤誤差e一致收斂.
3 仿真研究
為了驗(yàn)證文中方法的有效性,將對(duì)系統(tǒng)的位置跟蹤和速度同步進(jìn)行仿真研究.仿真以雙電機(jī)伺服系統(tǒng)為研究對(duì)象,其系統(tǒng)參數(shù)如表1所示.

表1 雙電機(jī)伺服系統(tǒng)參數(shù)
仿真中,選取yd=2sin(2/5πt)為跟蹤信號(hào),應(yīng)用式(14)~(17)所給出的控制率對(duì)系統(tǒng)進(jìn)行控制.設(shè)計(jì)參數(shù)選擇如下:α0=46,α1=56,β0=10,β1=65,p0=11,q0=9,p1=9,q1=7,r=8.005,b=350,其中可變系數(shù)ψ的參數(shù)選擇為η=300.
位置跟蹤和速度同步仿真結(jié)果如圖2~5所示.
圖2 位置跟蹤結(jié)果
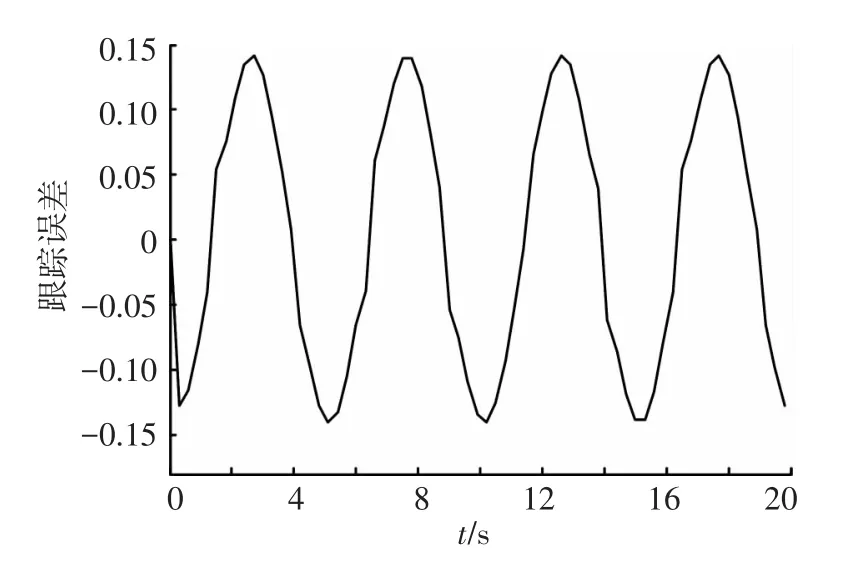
圖3 位置跟蹤誤差
圖 2、3為跟蹤控制的結(jié)果,圖 4、5給出了同步控制的結(jié)果.從仿真結(jié)果可以看出,文中提出的方法具有很好的控制性能,即具有較快的收斂速度和較小的誤差,該方法既能保證兩電機(jī)快速達(dá)到同步,又能保證輸出高精度跟蹤參考信號(hào).
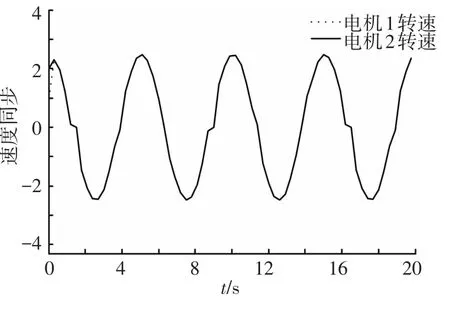
圖4 兩電機(jī)速度同步結(jié)果
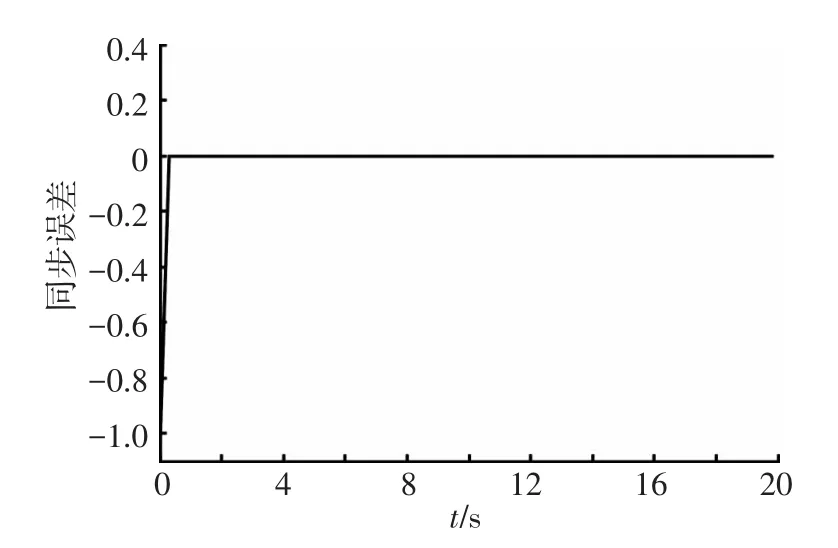
圖5 兩電機(jī)速度同步誤差
4 結(jié)語(yǔ)
本文考慮了含LuGre穩(wěn)態(tài)摩擦項(xiàng)的雙電機(jī)伺服系統(tǒng)同步和跟蹤控制問題.建立連續(xù)LuGre穩(wěn)態(tài)摩擦模型,解決原模型不可微分的缺點(diǎn),該連續(xù)模型可以有效刻畫庫(kù)倫摩擦、粘滯摩擦、Stribeck現(xiàn)象等多種摩擦特征.基于該模型提出了含有可變系數(shù)的快速終端滑模控制器,該方法既能保證電機(jī)快速達(dá)到同步,又能完成高精度的跟蹤.仿真結(jié)果表明了文中所提方法具有很好的性能.
[1]MUVENGEI O,KIHIU J,IKUA B.Dynamic analysis of planarmulti-body systems with LuGre friction at differently located revolute clearance joints[J].Multibody System Dynamics,2012,28(4):369-393.
[2]WANG X,WANG S.High performance adaptive control of mechanical servo system with LuGre friction model:identification and compensation[J].Journal of Dynamic Systems,Measurement and Control,2012,134(1):011021.
[3]HOSHINO D,KAMAMICHI N,ISHIKAWA J.Friction compensation using time variant disturbance observer based on the LuGre model[C]//Proceedings of the 12th IEEE InternationalWorkshop on Advanced Motion Control.Sarajevo:IEEE,2012:1-6.
[4]FREIDOVICH L,ROBERTSSON A,SHIRIAEV A,et al. LuGre-model-based friction compensation [J].Control Systems Technology,IEEE Transactions on,2010,18(1):194-200.
[5]向紅標(biāo),譚文斌,李醒飛,等.基于LuGre模型的自適應(yīng)摩擦補(bǔ)償[J].機(jī)械工程學(xué)報(bào),2012,48(17):70-74.
[6]WANG X J,LI J Y,WU B,et al.Continuous rotary motor electro-hydraulic servo system based on the zero phase error tracking controller[J].Applied Mechanics and Materials,2012,121:3205-3209.
[7]LIU Z,LIU B F.Robust Control strategy for the speed control of brushless DC motor[J].Journal of Harbin Institute of Technology,2013,20(2):90-94.
[8]ZHANG Z,CHAU K T,WANG Z.Chaotic speed synchronization control of multiple induction motors using stator flux regulation[J].Magnetics,IEEE Transactions on,2012,48(11):4487-4490.
[9]TIAN Y F,GUO Q C,Robustness-tracking control based on sliding mode and H∞theory for linear servo system[J].Journal of Harbin Institute of Technology,2005,12(2):213-217.
[10]LIU Z L,LIU G Z,LIU J.Neural adaptive sliding mode speed tracking control of a DC motor[J].Journal of Systems Engineering and Electronics,2004,15(3):304-308.
The fast terminal sliding mode control of dual-motor driving servo systems with friction
ZHAO Wei,REN Xuemei
(School of Automation,Beijing Institute of Technology,100081 Beijing,China)
To solve the non-differentiable problem of original frictionmodel,an exponential function containing speed variables is introduced to design the continuous differentiable LuGre steady-state friction model for dualmotor driving servo systems.The proposed model captures the main characteristics of friction including Stribeck effect,coulomb and viscous friction.Based on the continuous differentiable model,a nonlinear variable coefficient characterizing the synchronization rate is used for fast terminal sliding mode,such that the system is proved to achieve synchronization and tracking control for the reference signal with prescribed performance by Lyapunov function.The simulations are included to verify fast convergence speed and high tracking precision of the proposed algorithm.
dual-motor driving servo systems;fast terminal sliding mode;continuous LuGre friction model;tracking control;synchronization control
TP13
A
0367-6234(2014)03-0119-05
2013-10-23.
國(guó)家自然科學(xué)基金資助項(xiàng)目(61273150、60974046);高等學(xué)校博士學(xué)科點(diǎn)專項(xiàng)科研基金資助項(xiàng)目(20121101110029);長(zhǎng)江學(xué)者和創(chuàng)新團(tuán)隊(duì)發(fā)展計(jì)劃資助項(xiàng)目(IRT12 08).
趙 威(1986—),男,博士研究生;
任雪梅(1967—),女,教授,博士生導(dǎo)師.
任雪梅,xmren@bit.edu.cn.
(編輯 苗秀芝)
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
