面向任務(wù)的可重構(gòu)模塊化機(jī)器人構(gòu)型設(shè)計
2014-06-06 03:06:42吳文強(qiáng)管貽生朱海飛蘇滿佳李懷珠周雪峰
哈爾濱工業(yè)大學(xué)學(xué)報 2014年3期
吳文強(qiáng),管貽生,朱海飛,蘇滿佳,李懷珠,周雪峰
(1.華南理工大學(xué) 機(jī)械與汽車工程學(xué)院,510641 廣州;2.廣東工業(yè)大學(xué)機(jī)電工程學(xué)院,510006 廣 州;3.廣東省自動化研究所,510070 廣州)
面向任務(wù)的可重構(gòu)模塊化機(jī)器人構(gòu)型設(shè)計
吳文強(qiáng)1,管貽生2,朱海飛1,蘇滿佳1,李懷珠1,周雪峰3
(1.華南理工大學(xué) 機(jī)械與汽車工程學(xué)院,510641 廣州;2.廣東工業(yè)大學(xué)機(jī)電工程學(xué)院,510006 廣 州;3.廣東省自動化研究所,510070 廣州)
為解決可重構(gòu)模塊化機(jī)器人在應(yīng)用時如何找到合適的構(gòu)型來滿足特定任務(wù)的問題,提出一種面向任務(wù)的可重構(gòu)模塊化機(jī)器人構(gòu)型多目標(biāo)優(yōu)化方法.討論該模塊化機(jī)器人系統(tǒng)的基本結(jié)構(gòu),包括主要的模塊和控制系統(tǒng)的組成結(jié)構(gòu);在任務(wù)描述的基礎(chǔ)上,給出模塊化機(jī)器人構(gòu)型設(shè)計的優(yōu)化模型和流程;針對特定的攀爬任務(wù)和操作任務(wù),對模塊化機(jī)器人的構(gòu)型進(jìn)行優(yōu)化設(shè)計.仿真驗證了該方法的可行性和有效性.該方法具有面向任務(wù)和多目標(biāo)優(yōu)化等特點,涵蓋了自由度、可達(dá)性、耗能等多方面的性能優(yōu)化,適用于模塊化機(jī)器人的構(gòu)型設(shè)計.
面向任務(wù);模塊化;可重構(gòu)機(jī)器人;構(gòu)型設(shè)計;遺傳算法
模塊化技術(shù)已廣泛應(yīng)用于機(jī)器人領(lǐng)域的產(chǎn)品研究和開發(fā)中.可重構(gòu)模塊化機(jī)器人由于結(jié)構(gòu)和功能的可重組性,相對傳統(tǒng)機(jī)器人更具有柔性,對任務(wù)和環(huán)境的適應(yīng)能力更強(qiáng).采用模塊化技術(shù),方便機(jī)器人的維護(hù)和保養(yǎng),同時大大減少了機(jī)器人結(jié)構(gòu)設(shè)計的周期,降低了成本.
近年來,可重構(gòu)模塊化機(jī)器人的研究方向多集中在模塊設(shè)計、構(gòu)型設(shè)計、運(yùn)動學(xué)和動力學(xué)模型、控制系統(tǒng)等幾個方面[1].構(gòu)型設(shè)計一般是一個根據(jù)具體的任務(wù)從不同模塊組合中選擇最優(yōu)構(gòu)型的優(yōu)化問題,這些模塊多是事先設(shè)計好的、獨(dú)立的機(jī)電系統(tǒng),并且具有相同的軟、硬件接口,例如卡內(nèi)基梅隆大學(xué)的 RMMS[2]、德國宇航中心的LWR-Ⅲ[3]、美國 Robotics Research Corporation 的模塊化機(jī)器人及德國Schunk公司的PowerCube和PRC系列模塊等.優(yōu)化模型的設(shè)計變量即是一個完整的機(jī)器人構(gòu)型,可以表達(dá)成有向圖[4]、關(guān)聯(lián)矩陣(AIM矩陣)[5]等形式.其評價構(gòu)型優(yōu)劣的標(biāo)準(zhǔn)可以是最少自由度[6]、靈巧型[7]、容錯性能[8]等單項指標(biāo),或者是多個性能指標(biāo)的加權(quán)融合[9-10].這些性能指標(biāo)可看做優(yōu)化模型的目標(biāo)函數(shù)或者約束條件.建立運(yùn)動學(xué)和動力學(xué)模型是分析這些性能指標(biāo)的基礎(chǔ),通常采用如下兩種方法:一是 Denavit-Hartenberg(D-H)法[11],根據(jù)模塊本身的參數(shù)和裝配方式,自動生成機(jī)器人構(gòu)型的D-H參數(shù),從而建立機(jī)器人模型;另外一種是product-of-exponential(POE)法[12],機(jī)器人模型可由構(gòu)型中模塊的結(jié)構(gòu)參數(shù)直接生成.遺傳算法(genetic algorithms,GA)是模塊化機(jī)器人構(gòu)型優(yōu)化最常用的算法,文獻(xiàn)[9]中用了一個雙層GA算法進(jìn)行優(yōu)化,上層GA確定構(gòu)型,下層GA計算逆解,而在文獻(xiàn)[11]中下層GA則用來完成機(jī)器人的尺度優(yōu)化.這些GA算法都是單目標(biāo)優(yōu)化算法.
本文在現(xiàn)有的模塊化機(jī)器人平臺[13]的基礎(chǔ)上,實現(xiàn)了一種面向任務(wù)的多目標(biāo)構(gòu)型優(yōu)化算法.介紹了模塊化機(jī)器人平臺,包括基本模塊和系統(tǒng)組成結(jié)構(gòu),給出了構(gòu)型優(yōu)化設(shè)計模型,通過3種不同任務(wù)的構(gòu)型設(shè)計實例來驗證算法的可行性和有效性.
1 模塊化機(jī)器人系統(tǒng)
1.1 基本模塊
模塊化機(jī)器人系統(tǒng)是由一套具有相同連接方式的模塊構(gòu)成,根據(jù)機(jī)械結(jié)構(gòu)及功能的不同可分為關(guān)節(jié)模塊、連桿模塊、執(zhí)行器模塊、輔助功能模塊等.如圖1所示.
1)擺轉(zhuǎn)關(guān)節(jié)模塊(T模塊):單自由度關(guān)節(jié)模塊,關(guān)節(jié)軸與模塊輸入輸出軸線垂直,關(guān)節(jié)模塊的伺服驅(qū)動裝置采用結(jié)構(gòu)緊湊的驅(qū)動器和直流伺服電機(jī),并采用霍爾傳感器作為限位開關(guān);
2)回轉(zhuǎn)關(guān)節(jié)模塊(I模塊):單自由度關(guān)節(jié)模塊,關(guān)節(jié)軸與模塊輸入輸出軸線平行;
3)連桿模塊:與I模塊結(jié)構(gòu)類似,但不具有驅(qū)動功能,可用于調(diào)整機(jī)器人尺度;
4)吸附模塊(S模塊):由3個呈正三角形分布的吸盤、真空泵、壓力傳感器及其他氣動元件構(gòu)成,并采用獨(dú)立的控制器對傳感器信號進(jìn)行采集和處理;
5)輪/足模塊(W模塊):可用于輪式移動機(jī)器人或特殊步行機(jī)器人;
6)夾持器模塊(G模塊):驅(qū)動裝置是電流驅(qū)動的盤式電機(jī),V型槽的設(shè)計使得能夾持圓形、方形等多種物體.
以上模塊之間的連接采用卡環(huán)加定位銷的方式,可快速實現(xiàn)模塊化機(jī)器人的重構(gòu).通過組合這些模塊,可以得到多種不同構(gòu)型的機(jī)器人,例如機(jī)械臂、攀爬機(jī)器人、步行機(jī)器人、輪式機(jī)器人等[13].
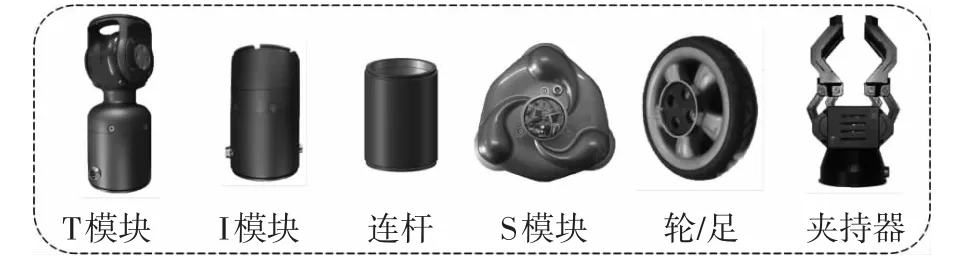
圖1 模塊化機(jī)器人基本模塊
1.2 系統(tǒng)功能
根據(jù)模塊化、可重構(gòu)、開放性等設(shè)計準(zhǔn)則,采用PC作為主控制平臺,通過CAN總線與各個模塊進(jìn)行通訊,構(gòu)成開放式、分布式的控制架構(gòu).
圖2所示為模塊化機(jī)器人系統(tǒng)功能結(jié)構(gòu)簡圖,人機(jī)界面模塊負(fù)責(zé)整個系統(tǒng)的總體調(diào)度和資源管理功能,包括人機(jī)交互、通訊、文件系統(tǒng)、狀態(tài)監(jiān)控、信息融合等功能;對機(jī)器人的控制和操作指令可通過如下3種方式輸入:通過人機(jī)界面直接輸入,通過遙操作器輸入和外部傳感器反饋;任務(wù)控制模塊對輸入的任務(wù)進(jìn)行初步的解析和規(guī)劃,若是設(shè)計任務(wù)則由構(gòu)型設(shè)計模塊進(jìn)行處理,運(yùn)動任務(wù)則進(jìn)行相應(yīng)的運(yùn)動規(guī)劃和運(yùn)動控制,值得注意的是,設(shè)計功能模塊和運(yùn)動功能模塊是建立在統(tǒng)一的模塊化機(jī)器人運(yùn)動學(xué)和動力學(xué)模型的基礎(chǔ)之上的;基于OpenGL的仿真模塊能夠直觀地描述設(shè)計的構(gòu)型或機(jī)器人運(yùn)動的狀況.
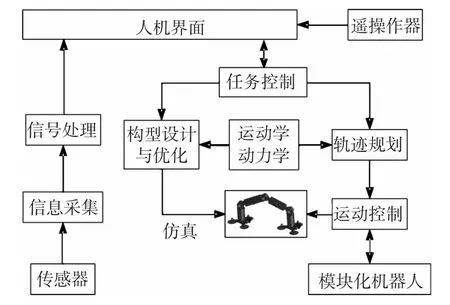
圖2 模塊化機(jī)器人系統(tǒng)功能結(jié)構(gòu)
2 構(gòu)型設(shè)計模型
2.1 任務(wù)描述
模塊化機(jī)器人的構(gòu)型設(shè)計是一個基于任務(wù)的設(shè)計過程.一般情況下,一個完整的任務(wù)可以分解成一系列的子任務(wù),例如搬運(yùn)任務(wù)可分解為檢測、抓取、搬運(yùn)、放置等,而在構(gòu)型設(shè)計中,只需考慮與機(jī)器人運(yùn)動相關(guān)的細(xì)節(jié);因此,對于特定的任務(wù),可表示為機(jī)器人在操作空間中的運(yùn)動軌跡.文獻(xiàn)[6]和文獻(xiàn)[14]將機(jī)器人的工作任務(wù)描述為操作空間一系列零散的任務(wù)點,Tp={p∈SE(3)},這些點僅表示位置或位姿信息,而沒有給出時間相關(guān)信息,因此只能考慮可達(dá)性要求,而不包含動力學(xué)方面的要求.一個完整的任務(wù)描述應(yīng)包含速度、加速度和力的信息:

式中任務(wù)Tp是由操作空間內(nèi)一系列的位置向量p、速度向量v、加速度向量a和負(fù)載向量τ組成.
由于任務(wù)不同,這些任務(wù)點向量的維數(shù)可能少于6,例如,一個R3中的任務(wù)只有3個自由度,而機(jī)器人最終構(gòu)型的自由度數(shù)則取決于具體的任務(wù).
2.2 優(yōu)化模型
通過組合不同的模塊,可裝配成多種不同運(yùn)動學(xué)和動力學(xué)特征的機(jī)器人,構(gòu)型設(shè)計的目的就是從中選擇出最適合當(dāng)前任務(wù)的裝配形式.基于任務(wù)的模塊化機(jī)器人構(gòu)型優(yōu)化設(shè)計模型同樣包含設(shè)計變量、目標(biāo)函數(shù)和約束條件3部分,具體描述如下:
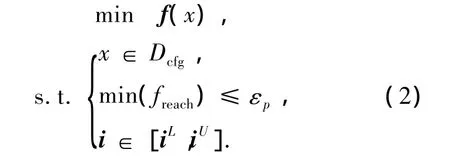
式中:x為設(shè)計變量,f(x)為多目標(biāo)函數(shù)向量.
2.2.1 設(shè)計變量
由于各個模塊本身的參數(shù)已確定,在構(gòu)型設(shè)計中,一個設(shè)計變量(機(jī)器人構(gòu)型,即x)僅包括模塊的種類、數(shù)量及模塊之間的連接方式等.對于串聯(lián)機(jī)器人,由于沒有環(huán)結(jié)構(gòu),一個有向樹就可以很形象地描述此構(gòu)型;因此,一個設(shè)計變量最終可以描述為基于圖論的關(guān)聯(lián)矩陣的形式.
2.2.2 目標(biāo)函數(shù)
目標(biāo)函數(shù)f(x)用于評價每個機(jī)器人構(gòu)型適應(yīng)給定任務(wù)的優(yōu)劣程度.機(jī)器人評價指標(biāo)有很多種,單一目標(biāo)很難客觀地評價一個機(jī)器人構(gòu)型的好壞程度,多目標(biāo)的融合或優(yōu)化策略是很必要的.在這里取f(x)=[fdoffergfvel],這3個函數(shù)分別表示自由度指標(biāo)、能量指標(biāo)和運(yùn)動學(xué)傳遞性能指標(biāo).
對于一個特定的任務(wù),通常希望使用最少的模塊,特別是與自由度緊密相關(guān)的關(guān)節(jié)模塊,自由度指標(biāo)可定義為

式中:ndof和nmdl分別表示自由度數(shù)目和模塊數(shù)目,wn和wm為加權(quán)系數(shù).
機(jī)器人能量消耗大致可分為兩部分,機(jī)械能和損耗能,因此能量指標(biāo)定義如下:
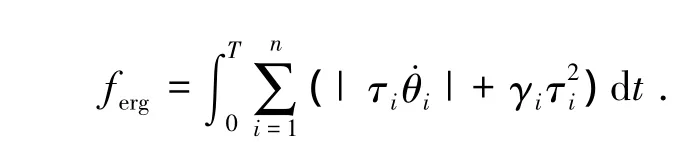
式中:γi是第i個關(guān)節(jié)的耗能系數(shù),與驅(qū)動關(guān)節(jié)運(yùn)動電機(jī)的速比、電樞電阻和轉(zhuǎn)矩常數(shù)有關(guān);T為執(zhí)行任務(wù)總耗時;n為機(jī)器人自由度數(shù);τi和˙θi分別是在t時刻第i個關(guān)節(jié)的轉(zhuǎn)矩力和速度.
速度指標(biāo)用于評價機(jī)器人在任務(wù)空間中傳遞性能,可用全局條件數(shù)[15]來表示:

式中kJ為任務(wù)空間W中當(dāng)前位姿的機(jī)器人條件數(shù).
2.2.3 約束條件
1)變量約束:變量的設(shè)計域約束Dcfg與具體的模塊相關(guān),例如夾持器等末端執(zhí)行器模塊只能裝配在末端,兩個相鄰的關(guān)節(jié)模塊不能同軸等,另外構(gòu)型的自由度數(shù)目一般不超過7;
2)可達(dá)性約束:即是否存在逆解的問題,可描述為freach=‖Δ‖≤εp,其中,‖·‖表示歐氏距離,εp表示最大允許誤差;
3)關(guān)節(jié)約束:包括關(guān)節(jié)位置Θ、速度V、加速度A和力/力矩約束Γ,iL和iU分別表示關(guān)節(jié)約束的最小和最大值,其中i=Θ,V,A,Γ.
2.3 優(yōu)化流程
模塊化機(jī)器人構(gòu)型優(yōu)化的流程如圖3所示.
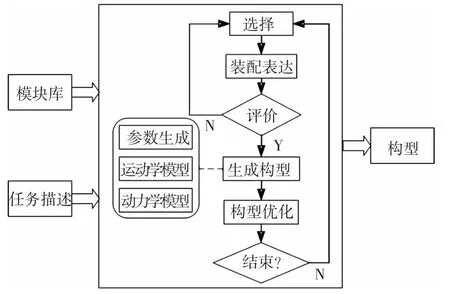
圖3 模塊化機(jī)器人構(gòu)型優(yōu)化流程
模塊庫和任務(wù)為輸入量,優(yōu)化結(jié)果為最優(yōu)構(gòu)型表達(dá)(多目標(biāo)優(yōu)化問題通常存在一個解集),具體流程如下:首先,從模塊庫里選擇適量的模塊進(jìn)行裝配,對于符合變量設(shè)計域的裝配體進(jìn)行構(gòu)型的自動生成,包括機(jī)器人構(gòu)型參數(shù)的生成,運(yùn)動學(xué)、動力學(xué)自動建模等;然后,根據(jù)目標(biāo)函數(shù)和約束條件對此構(gòu)型進(jìn)行性能評價;重復(fù)以上步驟直到目標(biāo)函數(shù)值滿足預(yù)期或者達(dá)到了設(shè)定的迭代次數(shù).
由于本文所研究的構(gòu)型為串聯(lián)結(jié)構(gòu),因此機(jī)器人運(yùn)動學(xué)正解可由各個模塊的參數(shù)和連接參數(shù)直接求得;運(yùn)動學(xué)逆解可由Newton-Raphson迭代法求解;而動力學(xué)則可通過Newton-Euler遞推公式求得.其中雅可比矩陣是運(yùn)動學(xué)問題的基礎(chǔ),由于模塊化機(jī)器人構(gòu)型的多樣性,雅可比矩陣一般不是方陣,求逆問題可用偽逆的方法:

式中:λ為阻尼因子,I為單位矩陣.
3 實例
3.1 爬壁任務(wù)
爬壁機(jī)器人可以在墻壁或天花板上自由移動,因而能夠替代人類從事墻壁清潔、核設(shè)施維護(hù)、船體噴涂、消防救援等高危任務(wù),已逐漸成為機(jī)器人領(lǐng)域的研究熱點.這里所研究的對象為雙手爪式模塊化機(jī)器人,機(jī)器人的兩端是兩個吸附模塊,其他模塊則根據(jù)具體的任務(wù)而定.
如圖4所示為一個簡單的爬壁任務(wù),要求機(jī)器人在相鄰兩個墻壁上做壁面過渡運(yùn)動.
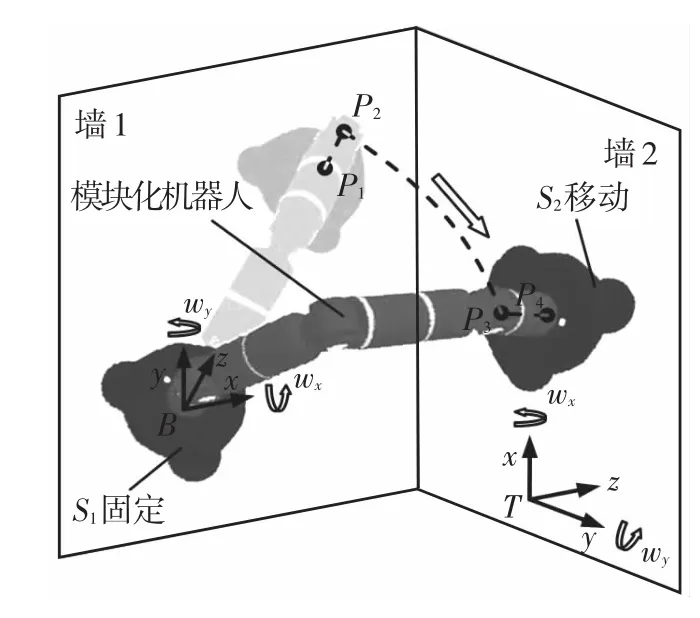
圖4 爬壁任務(wù)
設(shè)第一個吸附模塊(記作S1)吸附在第一個墻面上,在其上建立的坐標(biāo)系{B}為機(jī)器人的基坐標(biāo)系,另外一個吸附模塊S2從第一個墻面上的一個吸附點P1移動到另一個墻面上的一個吸附點P4,并要求S2分別在這兩個墻面上的這兩個點能夠吸附成功,坐標(biāo)系{T}為工具坐標(biāo)系.可以看出,為了保證吸附模塊在每個吸附點吸附成功,需要保證工具坐標(biāo)系的z軸方向與吸附點所在墻面垂直,再加上3個位置量,因此這個任務(wù)是5維的.為了避免S2在移動過程中與墻壁相碰撞,假設(shè)P1和P2之間、P3和P4之間的軌跡姿態(tài)不變,這兩段軌跡可以規(guī)劃為直線,軌跡點數(shù)據(jù)可由下式求得:

式中:pt、vt和at分別為t時刻軌跡點的位姿、速度和加速度.而P2和P3之間可以規(guī)劃為點到點(PTP)或直線等軌跡形式,且姿態(tài)不需要保證.
爬壁機(jī)器人屬于移動機(jī)器人的一種,當(dāng)S2移動到目標(biāo)位置并吸附墻2,而后松開S1,并移動至墻2上的一個目標(biāo)位置并吸附,從而可實現(xiàn)一個完整的壁面過渡運(yùn)動.為體現(xiàn)雙手爪移動的特性,把優(yōu)化模型(1)中的目標(biāo)函數(shù)修改為

式中:x-1表示反向裝配的機(jī)器人構(gòu)型,若x是初始條件下S1吸附固定、S2移動的構(gòu)型,則x-1就是使S2固定、S1移動的構(gòu)型.
這里采用NSGA-II(non-dominated sorting in genetic algorithm II)[16]來實現(xiàn)構(gòu)型設(shè)計的多目標(biāo)優(yōu)化問題.NSGA-II算法是在NSGA的基礎(chǔ)上引入快速非劣排序方法,降低了計算復(fù)雜度;并引入密度估計操作算子作為新的多樣性保持策略;同時引入精英保留機(jī)制,使得NSGA-II具有非常好的多目標(biāo)優(yōu)化性能.
NSGA-II提供兩種編碼方式:實數(shù)編碼和二進(jìn)制編碼.本文采用了二進(jìn)制編碼方式,如圖5所示為NSGA-II二進(jìn)制編碼的一個示例,其中僅包含了各個模塊的類型及裝配模式.
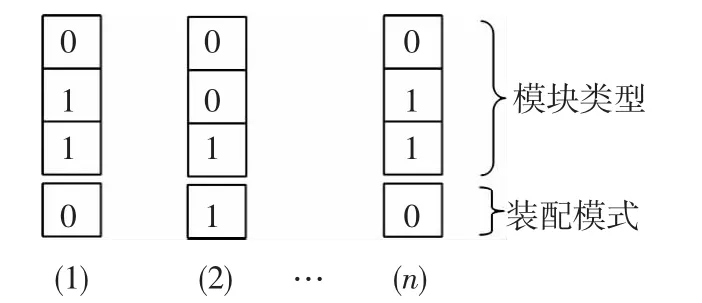
圖5 NSGA-II編碼示例
主要參數(shù)設(shè)置如下:交叉概率為0.8,變異概率為0.05,種群數(shù)設(shè)為50;式(2)中的加權(quán)系數(shù)wn和wm分別設(shè)置為0.6和0.4.經(jīng)過50次進(jìn)化之后得到了4組可行的構(gòu)型,如圖6所示,f1、f2和f3分別表示自由度指標(biāo)、能量指標(biāo)和運(yùn)動學(xué)指標(biāo)的值,其中(a)、(b)和(d)為5自由度構(gòu)型,(c)為6自由度構(gòu)型,這些構(gòu)型都是Pareto最優(yōu)解.在應(yīng)用時,可以從該最優(yōu)解集中選擇一個更適合當(dāng)前任務(wù)和環(huán)境的最優(yōu)解.可以看出,(b)具有最少的模塊數(shù),但為了完成運(yùn)動任務(wù)所消耗的能量比較大;(c)模塊數(shù)較多,但耗能比較少;(d)具有較少的自由度和明顯的對稱結(jié)構(gòu),在爬壁控制時會帶來很多便利,因此在執(zhí)行爬壁任務(wù)時可優(yōu)先選用(d)構(gòu)型的機(jī)器人,并命名為 W-Climbot[17].
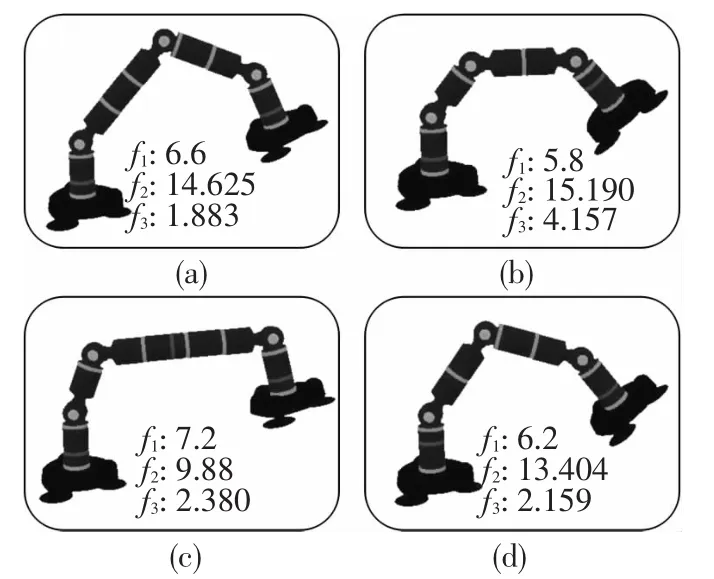
圖6 爬壁機(jī)器人構(gòu)型優(yōu)化結(jié)果
3.2 爬桿任務(wù)
爬桿機(jī)器人可用于摘果子、修剪枝葉、檢修橋梁、維護(hù)路燈等高空作業(yè),對雙手爪式模塊化攀爬機(jī)器人的相關(guān)研究可參考文獻(xiàn)[13,18],本節(jié)則是將上述的設(shè)計方法應(yīng)用于爬桿作業(yè).
一個簡單的爬桿任務(wù)如圖7所示,要求機(jī)器人在空間兩個桿之間做攀爬運(yùn)動,設(shè)第一個手爪G1抓緊第一個桿,在其上建立的坐標(biāo)系{B}為機(jī)器人的基坐標(biāo)系,另外一個手爪G2沿著第二桿從一個點P1移動到另一個點P2,假設(shè)運(yùn)動軌跡為一條直線.為了能夠準(zhǔn)確抓持圓桿,需要保證x方向的姿態(tài),因此這個任務(wù)也是5維的.優(yōu)化算法同樣采用NSGA-II,其參數(shù)設(shè)置同上.
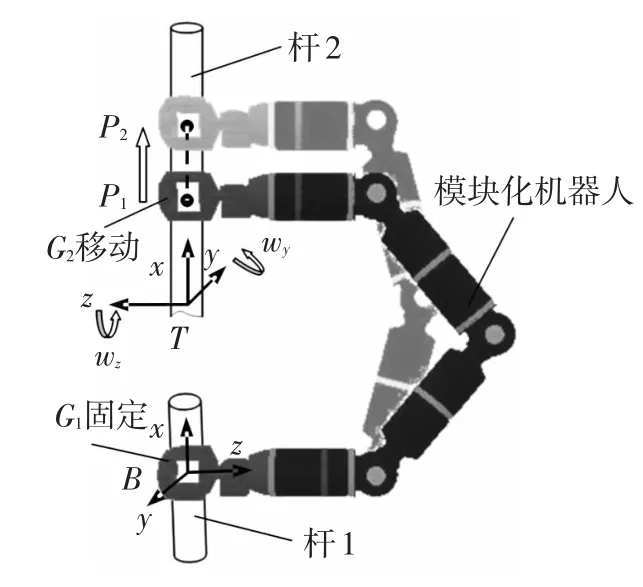
圖7 爬桿任務(wù)
經(jīng)50次進(jìn)化后得到6組不同的構(gòu)型(如圖8).
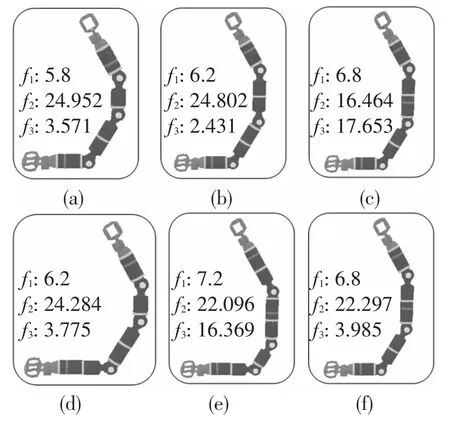
圖8 爬桿機(jī)器人構(gòu)型優(yōu)化結(jié)果
圖8中(a)、(b)和(d)為5自由度構(gòu)型,另外3個為6自由度構(gòu)型.可以看出,(b)與爬壁機(jī)器人構(gòu)型優(yōu)化結(jié)果中的(d)具有相似的構(gòu)型,具有較少的自由度和明顯的對稱結(jié)構(gòu),當(dāng)爬桿任務(wù)的維數(shù)不超過 5 時,優(yōu)先選取此構(gòu)型,并稱之為 Climbot[18-19].
3.3 操作任務(wù)
工業(yè)機(jī)器人是目前最成熟、應(yīng)用最廣泛的一類機(jī)器人,在焊接、搬運(yùn)、噴涂、裝配等很多行業(yè)都有典型的應(yīng)用.但傳統(tǒng)工業(yè)機(jī)器人的構(gòu)型不可改變,當(dāng)給定任務(wù)復(fù)雜多變時,由于本身機(jī)械構(gòu)型的限制,可能難以滿足需求.模塊化方法則可以很好地解決這個問題,擴(kuò)大了工業(yè)機(jī)器人的應(yīng)用范圍.
如圖9為一個簡單的操作任務(wù),機(jī)器人把一個物體從一個點P1搬運(yùn)到另一個點P2.由于不涉及姿態(tài),這個任務(wù)是3維的,同樣假設(shè)這兩點之間的運(yùn)動軌跡為直線.優(yōu)化算法及參數(shù)設(shè)置同上.
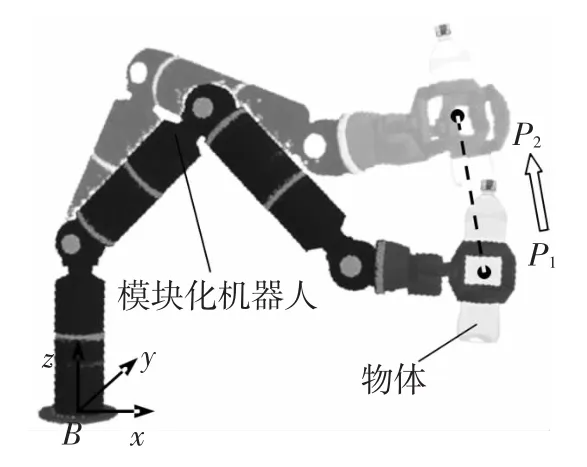
圖9 操作任務(wù)
經(jīng)50次進(jìn)化后得到8組不同的構(gòu)型(如圖10),其中(a)~(e)為3自由度構(gòu)型,(f)~(h)為4自由度構(gòu)型.可以看出,較少自由度的構(gòu)型傳遞性能較差,并且在完成給定的運(yùn)動任務(wù)時,所消耗的能量也較大,而4自由度構(gòu)型則具有較好的傳遞性能和較少的耗能.對于當(dāng)前3維的任務(wù),4自由度構(gòu)型為冗余構(gòu)型,在這種情況下,運(yùn)動學(xué)逆解可能有無數(shù)組解,可以用優(yōu)化方法求解,本文采用統(tǒng)一的逆解迭代式(3)來求取其最小二乘解.
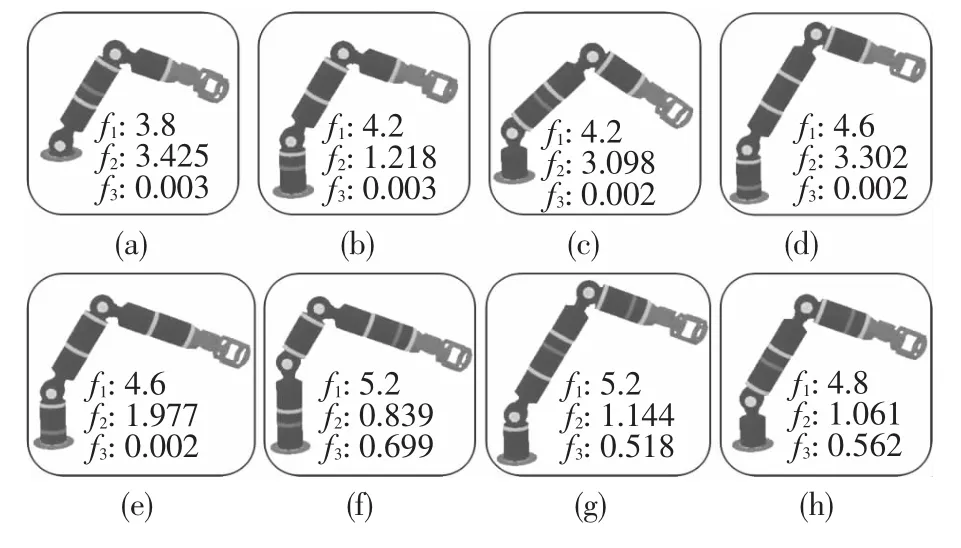
圖10 操作機(jī)器人構(gòu)型優(yōu)化結(jié)果
為形象地描述模塊化機(jī)器人的組成結(jié)構(gòu),以圖10(b)構(gòu)型為例,建立其仿真模型如圖11,此構(gòu)型機(jī)器人由基座和另外5個模塊組成,其中包含2個T關(guān)節(jié)模塊、1個I關(guān)節(jié)模塊、1個連桿模塊和1個夾持器模塊,各模塊之間采用卡環(huán)連接.
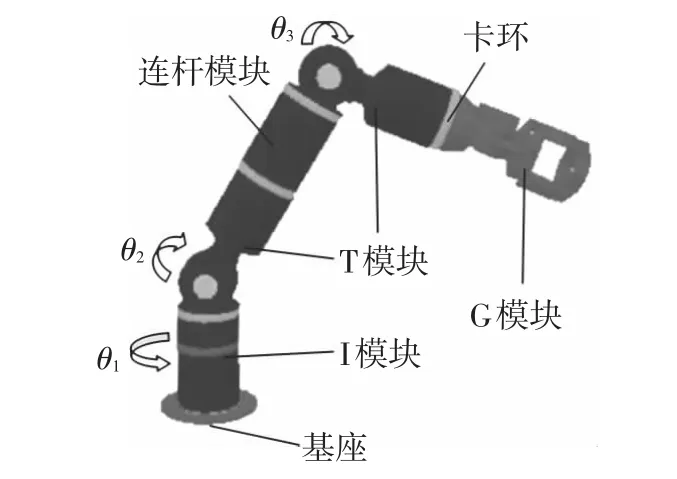
圖11 3-DoF構(gòu)型仿真模型
4 結(jié)論
1)本文提出了一種面向任務(wù)的可重構(gòu)模塊化機(jī)器人構(gòu)型設(shè)計方法,該方法能夠根據(jù)現(xiàn)有的模塊和特定的任務(wù),得到一組滿足多目標(biāo)函數(shù)優(yōu)化的最優(yōu)構(gòu)型.
2)該方法采用多目標(biāo)優(yōu)化模型,體現(xiàn)了自由度、可達(dá)性、能耗、運(yùn)動學(xué)傳遞等多方面的性能優(yōu)化.針對攀爬任務(wù)和操作任務(wù)的仿真實例很好地驗證該方法的可行性和有效性.
3)在給定步行任務(wù)的情況下,該方法同樣適用于以輪/足模塊作為雙足的模塊化主動步行機(jī)器人構(gòu)型的分析與設(shè)計.
[1]劉明堯,談大龍,李斌.可重構(gòu)模塊化機(jī)器人現(xiàn)狀和發(fā)展[J].機(jī)器人,2001,23(3):275-279.
[2]PAREDIS C J J,BROWN H B,KHOSLA P K.Rapidly deployable manipulator system [J]. Roboticsand Autonomous Systems,1997,21(3):289-304.
[3]ALBU-SCHAFFER A,EIBERGER O,GREBENSTEIN M,et al.Soft robotics [J].IEEE Robotics and Automation Magazine,2008,15(3):20-30.
[4]CASTANO A,WILL P.Representing and discovering the configuration of Conro robots[C]//IEEE InternationalConference on IntelligentRobotsand Automation.Piscataway:IEEE,2001:3503-3509.
[5]CHEN I M,BURDICK J.Enumerating the non-isomorphic assembly configurations of modular robotic systems[J].International Journal of Robotics Research,1998,17(7):702-719.
[6]YANG G,CHEN I M.Task-based optimization of modular robot configurations:minimized degree-of-freedom approach[J].Mechanism and Machine Theory,2000,35(4):517-540.
[7]YIM M,DUFF D G,ROUFAS K D.PolyBot:a modular reconfigurable robot[C]//IEEE International Conference on Robotics and Automation.Piscataway:IEEE,2000:514-520.
[8]LI Q,ZHAO J.A universal approach for configuration synthesis of reconfigurable robots based on fault tolerant indices[J].Industrial Robot,2012,39(1):69-78.
[9]CHOCRON O,BIDAUD P.Evolutionary algorithms in kinematic design ofrobotic systems[C]//IEEE InternationalConference on IntelligentRobotsand Systems.Piscataway:IEEE,1997:1111-1117.
[10]FARRITOR S,DUBOWSKY S.On modular design of field robotic system[J].Autonomous Robots,2001,10(1):57-65.
[11]HAN J,CHUNG W K,YOUM Y,et al.Task based design of modular robot manipulator using efficient genetic algorithm[C]//IEEE International Conference on Robotics and Automation.Piscataway:IEEE,1997:507-512.
[12]BI Z M,ZHANG W J,CHEN I M,et al.Automated generation of the DH parameters for configuration design of modular manipulators[J].Robotics and computer-Integrated Manufacturing,2007,23:553-562.
[13]GUAN Y,JIANG L,ZHANG X,et al,Development of novel robots with modular methodology[C]//IEEE/RSJ InternationalConference on IntelligentRobotsand Systems.Piscataway:IEEE,2009:2385-2390.
[14]CHEN I M,BURDICK J.Determining task optimal modular robotassembly configurations[C]//IEEE International Conference on Robotics and Automation.Piscataway:IEEE,1995:132-137.
[15]ANGELES J,LOPEZ-CAJUN C S.Dexterity index of serial-type robotic manipulators[C]//American Society of Mechanical Engineers,Design Engineering Division(Publication)DE.New York:ASME,1988:79-84.
[16]DEB K,PRATAP A,AGARWAL S,et al.A fast and elitist multi-objective genetic algorithm:NSGA-II[J].IEEE Transactions on Evolutionary Computation,2002,6(2):182-197.
[17]GUAN Yisheng,ZHU Haifei,WU Wenqiang,et al.A modular biped wall-climbing robot with high mobility and manipulating function[J].IEEE/ASME Transactions on Mechatronics,2013,18(6):1787-1798.
[18]江勵,管貽生,蔡傳武,等.仿生攀爬機(jī)器人的步態(tài)分析[J].機(jī)械工程學(xué)報,2010,46(15):17-22.
[19]GUAN Y,JIANG L,ZHU H,et al.Climbot:A modular bio-inspired biped climbing robot[C]//IEEE InternationalConference on IntelligentRobotsand Systems.Piscataway:IEEE,2011:1473-1478.
Task-oriented configuration design of reconfigurable modular robots
WU Wenqiang1,GUAN Yisheng2,ZHU Haifei1,SU Manjia1,LI Huaizhu1,ZHOU Xuefeng3
(1.School of Mechanical and Automotive Engineering,South China University of Technology,510641 Guangzhou,China;2.School of Mechanical and Electrical Engineering,Guangdong University of Technology,510006 Guangzhou,China;3.Guangdong Institute of Automation,510070 Guangzhou,China)
For solving the problem of finding suitable robot configurations to meet the specific tasks in the application of reconfigurable modular robot,a task-oriented multi-objective configuration optimization method is discussed.At beginning,the basic structure of the modular robot system is introduced,including the main modules and components of the control system.Then,based on the description of the task,an optimization model of modular robot configuration design is represented.Finally,for the specific tasks of climbing and manipulating,the configuration optimal design of modular robot is processed.The feasibility and effectiveness of the method have been well verified by the optimization simulation.The method is task-oriented and multiobjective, and it includes the performance optimization of degrees-of-freedom, reach-ability, energy consumption,and so on.
task-oriented;modular;reconfigurable robot;configuration design;genetic algorithm
TP242
A
0367-6234(2014)03-0093-06
2013-05-22.
國家自然科學(xué)基金資助項目(50975089);廣東省自然科學(xué)基金資助資助(S2013020012797).
吳文強(qiáng)(1983—),男,博士研究生.
管貽生,ysguan@scut.edu.cn.
(編輯 楊 波)
猜你喜歡
海洋信息技術(shù)與應(yīng)用(2022年1期)2022-06-05 07:38:22
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
現(xiàn)代裝飾(2020年5期)2020-05-30 13:01:56
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
中國核電(2017年2期)2017-08-11 08:00:56
海峽姐妹(2017年7期)2017-07-31 19:08:17
流程工業(yè)(2017年4期)2017-06-21 06:29:50
