牽繩非保向力作用下的起重臂穩定性分析
2014-06-06 03:06:16劉士明陸念力孟麗霞
哈爾濱工業大學學報 2014年3期
劉士明,陸念力,孟麗霞
(哈爾濱工業大學機電工程學院,150001 哈爾濱)
牽繩非保向力作用下的起重臂穩定性分析
劉士明,陸念力,孟麗霞
(哈爾濱工業大學機電工程學院,150001 哈爾濱)
為準確地分析牽繩非保向力作用下的起重機伸縮臂起升平面外穩定性問題,建立牽繩作用下的多節伸縮臂的撓曲微分方程,引入適當的邊界條件,獲得多節伸縮臂平面外失穩特征方程的遞推表達式,并給出工程起重機常用臂節起升平面外失穩特征方程的顯示表達式;討論牽繩在吊臂方向的投影長度a與吊臂長度l的比值a/l對起重臂失穩臨界力的影響.對典型4節起重機伸縮臂進行穩定性分析,與ANSYS密分單元的計算結果比較表明:推導的失穩特征方程是完全正確的;起重臂的抗失穩能力隨著a/l比值的逐漸增大而逐漸減弱,并趨于定值.
起重機;穩定性分析;失穩特征方程;多節伸縮臂;變截面階梯柱
工程起重機作為工業建筑中不可替代的大型吊裝設備,其穩定性分析備受學者們關注[1-4].而輪式起重機由于機動靈活,操作方便,效率高,其應用更加廣泛.伸縮臂作為輪式起重機最重要的承載部件,為減輕質量及合理利用材料,通常呈階梯柱的形式,對于這類結構的穩定性問題,國內外許多學者都進行了深入的研究[5-8].我國起重機設計規范GB/T 3811—2008中,起重機伸縮臂起升平面外的失穩計算模型為變截面階梯柱[9],采用精確有限單元法計算其失穩臨界力[10].文獻[11-12]研究了伸縮臂內部支撐油缸對起重臂穩定性的影響,并給出伸縮臂失穩臨界力的遞推公式.本文作者在上述研究基礎上討論了吊臂間搭接摩擦力對起重臂起升平面外穩定性的影響,并與文獻[10]和文獻[11-12]的計算結果進行了分析比較[13-14].對于某些大型輪式起重機,為提高伸縮臂的承載能力,減小伸縮臂撓曲變形,都會在伸縮吊臂上安裝牽引鋼絲繩或拉索.由于牽引鋼絲繩或拉索的存在,使得起重機伸縮臂在起升平面外受非保向力的作用,雖然這些牽繩或拉索引起的非保向力能有效地提高伸縮臂的穩定承載力,但缺乏相應的理論推導.文獻[15]雖然研究了平面內單鋼絲繩非保向力作用下起重機吊臂的穩定性問題,但該研究只針對吊臂為等截面的情況,對于變截面階梯柱結構是否適用,有待進一步的分析.
本文詳細討論牽繩等非保向力作用下的多節伸縮臂起升平面外穩定性問題,并分析牽繩在吊臂方向的投影長度與伸縮臂長度的比值對起重機伸縮臂起升平面外失穩臨界力的影響.
1 牽繩作用下的起重臂失穩特征方程
牽繩作用下的多節起重機伸縮臂的失穩變形如圖1所示,Δ為伸縮臂頭部的豎向位移,δ為伸縮臂頭部側向位移,ls為牽繩的長度,a為變形前牽繩在伸縮臂軸向上的投影,h為變形前牽繩在z方向的投影.忽略伸縮臂的軸向變形,令牽繩引起的非保向力為F,由圖1可知,其伸縮臂頂部受到的軸向力Fx、側向力Fy和豎向力Fz分別為
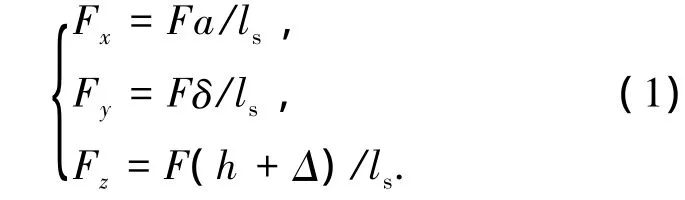
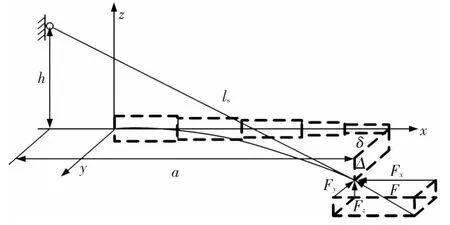
圖1 多節起重機伸縮臂的失穩變形圖
由圖1可知,牽繩作用下的多節伸縮臂平面外失穩力學模型如圖2所示,設第i節伸縮臂的截面慣性矩為Ii,xi為第i節伸縮臂頂部到伸縮臂根部的長度,伸縮臂總長為l=xn,E為彈性模量.
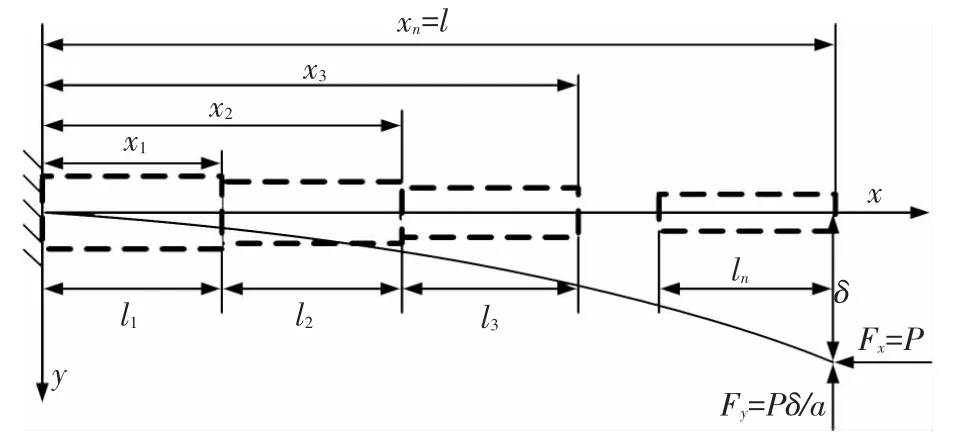
圖2 多節起重機伸縮臂的失穩力學模型
將吊臂頭部的軸力Fx改用符號P代替,式(1)中的側向分力可表示為

由圖2所示的多節伸縮臂失穩力學模型,可
建立各節伸縮臂撓曲微分方程為
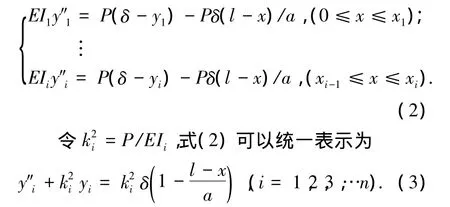
撓曲微分方程(3)的通解可表示為

由伸縮臂根部的邊界條件x=0時,y1=y'1=0,得

又由位移邊界條件 x=xi時,yi=yi+1,y'i=y'i+1得各積分常數之間的關系為
將式(5)整理得積分常數之間遞推表達式:
式(6)中Qi可表示為
由式(6)得積分常數Cn和Dn的表達式:

由伸縮臂頂部邊界條件x=xn=l時,yn=δ得

將式(7)代入式(8)得伸縮臂失穩特征方程:

將式(4)代入式(9)中,且由于側向位移δ為任意數值,故多節伸縮臂的失穩特征方程變為

失穩特征方程(10)是以P為未知量的非線性超越方程,解此超越方程即可得結構的失穩臨界力Pcr.當多節伸縮臂具有相同的截面慣性矩,即伸縮臂為等截面的極限情況,其失穩特征方程(10)可退化為與文獻[9]和文獻[15]具有相同的表達形式:

由失穩特征方程(10)和式(11)可知,單根鋼絲繩對伸縮臂平面外穩定性的影響僅與鋼絲繩在伸縮臂方向的投影長度a和伸縮臂的長度l的比值a/l有關.
2 起重臂失穩特征方程的顯示表達
為了便于工程實際中指導起重機結構設計人員對牽繩作用下的伸縮臂進行穩定性分析,本文將給出工程中多節起重機常用臂節的平面外失穩特征方程的顯示表達式.
當n=1時,失穩特征方程式(10)可表示為

或表示為

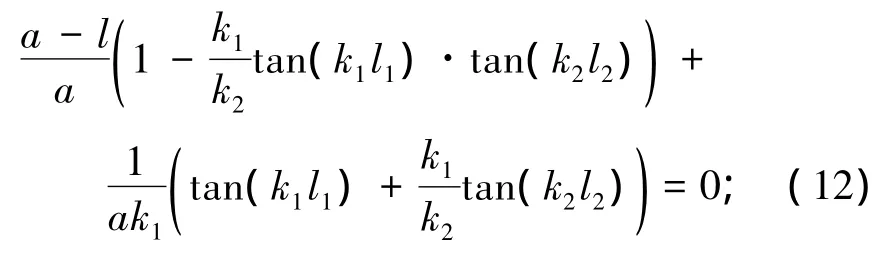
當n=2時,起重臂的失穩特征方程可表示為
當n=3時,起重臂的失穩特征方程可表示為
當n=4時,起重臂的失穩特征方程可表示為
當n=5時,起重臂的失穩特征方程可表示為

式(12)~式(15)中,tii=tan(kili),li表示各節伸縮臂的長度,如圖2所示,即 l1=x1,li=xi-xi-1.
式(12)~式(15)分別表示起重機有2、3、4、5節伸縮臂時的平面外失穩特征方程的顯示表達式.
3 起重機伸縮臂平面外穩定性分析實例
為了分析牽繩或拉索等非保向力對起重機伸縮臂穩定性的影響,針對牽繩作用下的典型4節起重機伸縮臂進行平面外穩定性分析.通常歐拉臨界力可表達式為Pcr=π2EI/(μl)2,為了便于分析比較,采用量綱一的失穩計算長度系數μ來表示起重臂的抗失穩能力.
算例 圖3所示為牽繩作用下4節起重機伸縮臂模型,伸縮臂的總長度為l,各節伸縮臂長度l1=0.34l,l2=0.22l,l3=0.22l,l4=0.22l,牽繩在伸縮臂方向投影長度為a,截面慣性矩比值為I1/I2=1.3,I2/I3=1.9,I3/I4=2.5.
圖3 牽繩作用下的4節伸縮臂模型
由失穩特征方程式(10)和式(11)可知,牽繩作用下的伸縮臂失穩臨界力僅與長度比值a/l有關,將不同長度比值代入4節伸縮臂的顯示失穩特征方程(14),可得用慣性矩I1表示的失穩計算長度系數μ=π/(k1l).同時為驗證本文理論推導的正確性,采用有限元分析軟件ANSYS進行驗證,分別采用Beam44單元和Link10單元來模擬伸縮臂和牽繩,每節伸縮臂劃分為20個單元,其計算結果列于表1,表中階梯柱代表無牽繩作用時伸縮臂的失穩計算長度系數.

表1 不同長度比值的計算長度系數
由表1可知,本文與ANSYS計算結果在小數點后四位完全相同,驗證了本文理論推導的正確性及求解的精確性.同時還可以看出,隨著長度比值a/l的逐漸增大,其失穩計算長度系數μ逐漸增大,即結構的失穩臨界力逐漸減小,抗失穩能力變弱.當a/l→∞ 時,其失穩計算長度系數μ與沒有牽繩時相等,此時可認為牽繩對起重機伸縮臂平面外的穩定性沒有影響.
4 結論
1)分析了牽繩或拉索等引起的非保向力作用下的多節起重機伸縮臂平面外穩定性,給出了起重臂失穩特征方程的遞推表達式;并結合起重機設計規范,給出了2~5節伸縮臂失穩特征方程的顯示表達式,為起重機設計規范GB/T 3811—2008的修訂提供理論依據.
2)比較本文計算結果與ANSYS密分單元的計算結果表明,本文針對牽繩非保向力作用下的起重臂平面外失穩問題的理論推導是正確的,用該理論公式求解起重臂的起升平面外的失穩臨界力是精確的.
3)對典型4節起重臂穩定性算例分析表明,隨著長度比值a/l的逐漸增大,起重臂的平面外失穩計算長度系數μ逐漸增大,并趨于定值,即非保向力對起重臂穩定性的影響隨著a/l的增大而減弱.
[1]FRASER D J,BRIDGE R Q.Buckling of stepped crane columns[J].Journal of Constructional Steel Research,1990,16(1):23-38.
[2]SIMAO P D,COELHO A M,BIJLAARD F S K.Stability design of crane columns in mill buildings[J].Engineering Structures,2012,42:51-82.
[3]WANG Anlin,JIANG Tao,DONG Yaning,et al.Study on structural instability of large crawler crane boom structure[C]//2009 3rd International Conference on Techning and ComputationalScience.Heideberg:Springer Verlag,2012:401-406.
[4]張宏生,陸念力.動臂式塔機變截面吊臂的整體穩定性分析[J].哈爾濱工業大學學報,2010,42(9):1394-4397.
[5]ZHANG Hongsheng,LU Nianli,LAN Peng.Buckling of stepped beams with elastic supports[J].Journal of Harbin Institute of Technology,2009,16(3):436-440.
[6]LI Q S.Buckling of multi-step non-uniform beams with elastically restrained boundary conditions[J].Journal of Constructional Steel Research,2001,57(7):753-777.
[7]PARK J S,STALLINGS J M.Lateral-torsional buckling of stepped beams[J].Journal Structural Engineering,2003,129(11):1457-1465.
[8]PARK J S,STALLINGS J M.Lateral-torsional buckling of stepped beams with continuous bracing[J].Journal of Bridge Engineering,2005,10(1):87-95.
[9]中國國家標準化管理委員會.GB/T 3811—2008.起重機設計規范[S].北京:中國標準出版社,2008:181-183.
[10]陸念力,蘭朋,白樺.起重機箱形伸縮臂穩定性分析的精確理論解[J].哈爾濱建筑大學學報,2000,33(2):89-93.
[11]張月紅.具有油缸支撐的起重機箱形伸縮臂的穩定性研究[D].哈爾濱:哈爾濱工業大學,2007:14-23.
[12]LU Nianli,ZHANG Hongsheng,LAN Peng.Precise theoretical solution of Euler’s critical load for crane telescopic boom with cylinder supporting[C]//Proceedings of the 2007 International Conference on Advancesin Construction Machinery and Vehicle Engineering.Shanghai:Tongji University Press,2007:527-530.
[13]LIU S M,LU N L,WANG B.Comparison of three calculation models on overallstability analysis of telescopic boom with built-in cylinder[C]//Proceedings 2010 International Conference on Digital Manufacturing and Automation.Changsha:[s.n.],2010:400-404.
[14]劉士明.計及臂間搭接與摩擦影響的箱形伸縮臂整體穩定性研究[D].哈爾濱:哈爾濱工業大學,2008:10-24.
[15]孟曉平,陸念力,李良.非保向力作用下起重機吊臂起升平面外整體穩定特征方程及應用[J].哈爾濱建筑大學學報,1997,30(2):99-103.
Stability analysis of telescopic booms under pull-rope follower force
LIU Shiming,LU Nianli,MENG Lixia
(School of Mechatronics Engineering,Harbin Institute of Technology,150001 Harbin,China)
To solve the out-of-plane stability problem of the telescopic boom subjected follower forces,the deflection differential equations of the multi-telescopic boom model which under actions of pull-rope are established.With proper boundary conditions,the recurrence formulas of buckling characteristic equations are presented,and the explicit expressions of the boom in some practical applications are given.The influence on destabilizing critical force of telescopic boom due to the ratio of a/l is discussed in detail,where a is the length of wire projected to telescopic boom,and l is the length of telescopic boom.In comparison with the ANSYS method,the results show that the buckling characteristic equations are completely correct.As the ratio of a/l increases,the capacity of anti buckling reduces and tends to be a constant value.
crane;stability analysis;buckling characteristic equation;multi-section telescopic boom;stepped column
TH213;O317
A
0367-6234(2014)03-0026-04
2013-03-29.
國家科技支撐計劃資助項目(2008BAJ09B01-03).
劉士明(1983—),男,博士研究生;
陸念力(1955—),男,教授,博士生導師.
劉士明,lsm831206@163.com.
(編輯 楊 波)
