DCS系統在鍋爐控制系統中的應用
2014-05-29 10:55:58常江孫昂原銘良
電氣開關 2014年1期
關鍵詞:模型
常江,孫昂,原銘良
(沈陽化工大學,信息工程學院,遼寧 沈陽 110142)
1 引言
由于遼寧華錦熱電廠鍋爐系統中主蒸汽壓力回路的前后裝置間耦合比較嚴重[1],壓力控制過程反應緩慢,動態響應時間長,滯后嚴重。傳統PID的控制效果不理想,直接影響到發電機的經濟運行和能源的消耗。因此,采取Profit Loop控制技術來解決機組中大滯后回路問題,提高控制水平。
2 Profit Loop的控制原理
Profit Loop是完全集成到霍尼韋爾PKS系統的一種單輸入/單輸出(SISO)、基于模型的預測控制和優化技術。通過對被控對象的在線辨識,以適應被控對象動態特性的變化。最后通過滾動優化,計算出合理的控制信號[2]。模型預測控制方框圖如圖1。
Profit Loop可以根據當前值及將來值產生控制動作序列,并用最優的方式去趨近設定值,產生的控制序列如圖2所示。
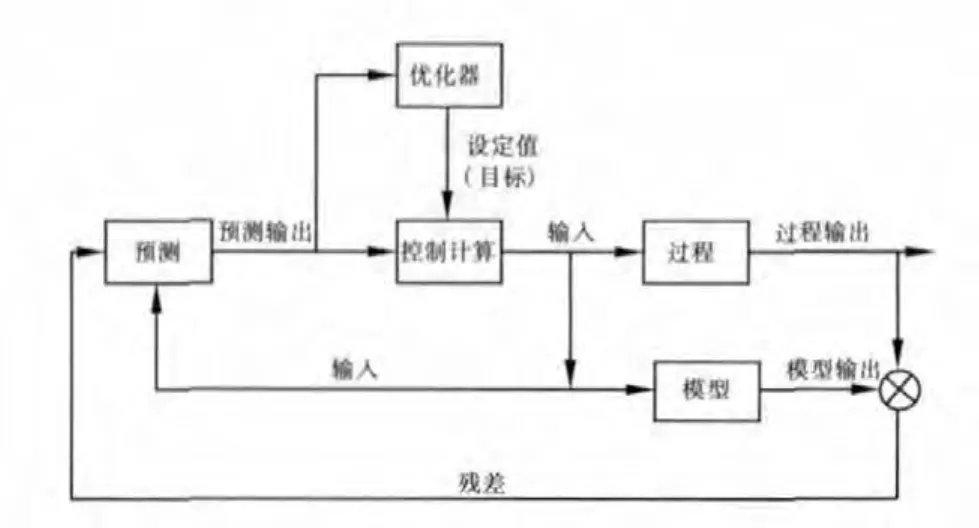
圖1 模型預測方框圖
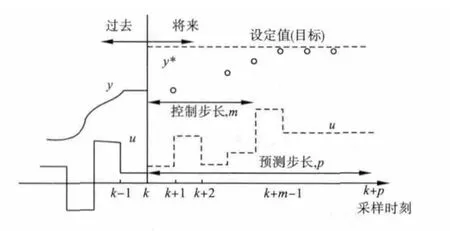
圖2 控制序列圖
3 主蒸汽壓力調節對象的動態特性
以主蒸汽壓力為被控量的燃燒調節對象流程如圖3所示。由爐膛1,蒸發受熱面2,汽包3和過熱器4等組成[3]。其主要的擾動是燃燒量擾動(內部擾動)以及蒸汽流量的擾動(外部擾動)。
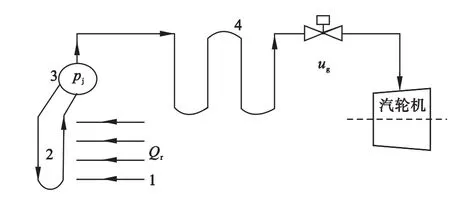
圖3 汽壓對象生產流程示意圖
3.1 內擾下蒸汽壓力調節對象的動態特性
記燃燒量的變化為ΔuB,當ΔuB作階躍變化后爐膛熱負荷立即增大,致使汽包壓力pj上升,導致蒸汽流量D增加。由于汽輪機調汽門開度不變,主汽壓力pr將隨著蒸汽的積累而增大。pr的升高又會使蒸汽通向汽輪機的流出量增加,最終達到新平衡[3],如圖4所示。
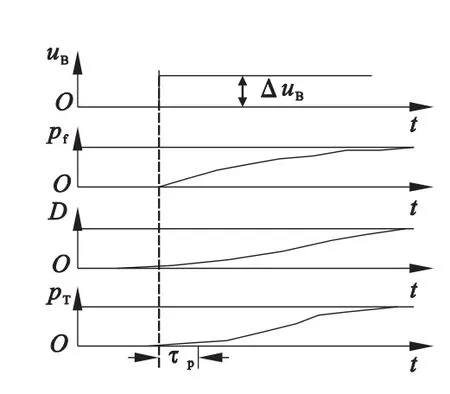
圖4 內擾下汽壓的響應曲線
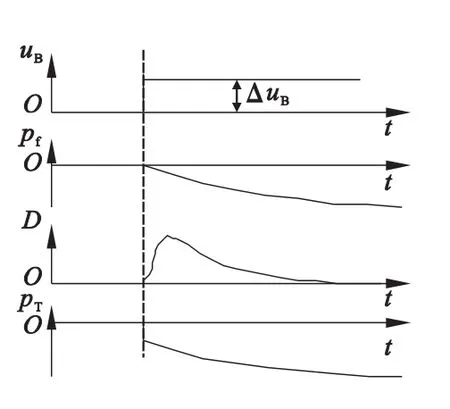
圖5 外擾下汽壓的響應曲線
其傳遞函數可寫為:

3.2 外擾下蒸汽壓力調節對象的動態特性
外部擾動是指電網負荷變化的擾動,它通過改變調節汽門開度ug,使汽輪機進氣量D變化而施加的擾動[3]。圖5表示了在ug作階躍擾動時汽壓的響應曲線,其中A是主汽壓的突跳值。傳遞函數可寫為:

4 鍋爐[4]主蒸汽壓力控制方案分析
通過串級控制能夠有效的克服兩種擾動的影響,如圖6所示,控制器為主汽壓力調節器,引入二次油壓的變化作為前饋,可以快速響應汽輪機汽門開度的變化,主蒸汽壓力調節器的輸出為熱量信號,作為副調節器燃料調節器的設定值,燃料調節器的反饋為熱量信號,燃料調節器的輸出為給煤機的轉速設定值,給煤機內部閉環控制跟蹤轉速設定值。此方案對于影響主蒸汽壓力的內部擾動可以通過副調節器來克服,同時引入了反映負荷變化的二次油壓作為前饋,能夠快速響應負荷的變化[3]。
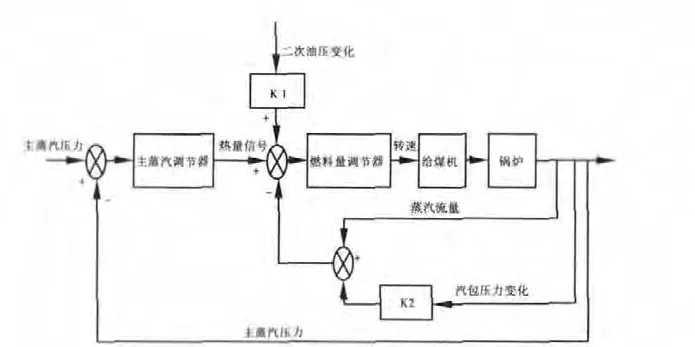
圖6 主蒸汽壓力控制方框圖

圖7 主蒸汽壓力的模型預測控制方案
5 主蒸汽壓力的模型預測控制方案
雖然PID串級控制能夠達到部頒標準[3],但主蒸汽壓力會隨著電網負荷的變化而波動,并且控制器的控制量很難控制,增添了執行機構的負擔,使得執行元件的使用壽命減少。因此對于這樣多干擾,耦合嚴重,大滯后對象,在原有的控制方案基礎上采用模型預測控制[5]。
采用的模型預測控制方案如圖7所示,副回路采用傳統的PID控制。針對主回路非線性強,干擾大,采取模型預測控制算法[6],即主調節器用MPC控制器。
6 Profit Loop控制的實施
6.1 建立模型
在霍尼韋爾PKS系統系統中,通過多次的給汽壓對象施加偽矩形脈沖響應(PRBS)激勵信號來獲得系統模型,實現Profit Loop。
6.2 模型的預測
通過將Profit Loop得到的動態模型置入到控制器的方法,就可以進行預測。從而將控制器過去的OP值與將來的預測PV值聯系起來,如圖8所示,其傳遞函數可描述為:

其中,K是對象的增益系數;T是對象的滯后時間;n和d是模型系數;s是拉普拉斯常數[2]。
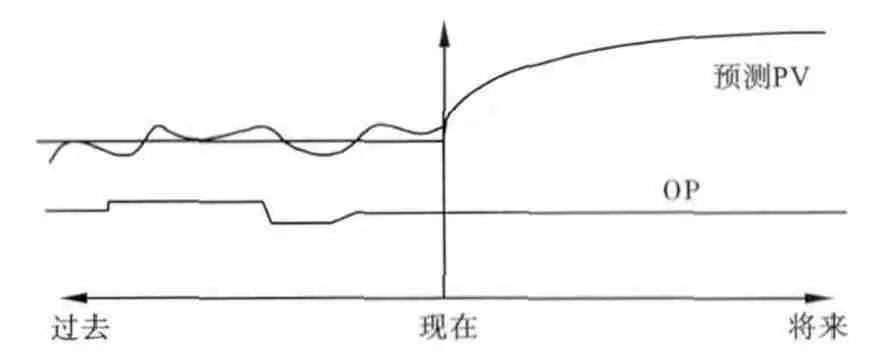
圖8 預測PV軌跡
經過反復的測試汽壓對象的系統模型為:

6.3 控制器建立及運行
完成了測試結果評估后,將模型下載到霍尼韋爾PKS系統的C300控制器中運行,一旦計算出PV將來的運行軌跡,控制器就會采取相應的控制動作,促使過程的運行軌跡朝向控制目標。在這段時間,滾動計算促使PV值靠近SP值,減少控制器的偏差[2]。如圖9,圖10所示。
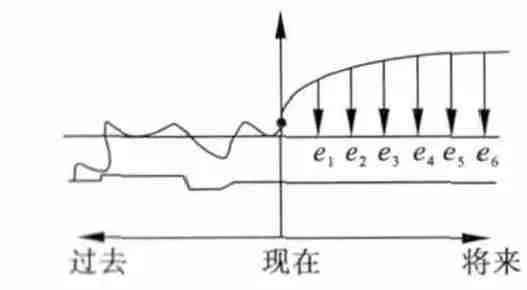
圖9 滾動計算示意圖
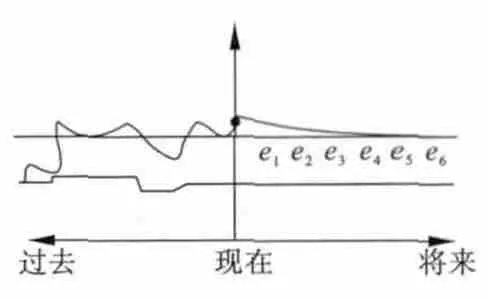
圖10 控制作用的滾動優化
7 Profit Loop控制的效果
經過Profit Loop控制后,預測控制[7]投入運行,控制效果較好。不但主蒸汽壓力平穩,而且給煤機轉速特別平緩、波動小。這減輕了執行機構的負擔,同時執行元件的使用壽命得到了延長。相反,傳統PID控制器,由于其控制器的控制量變化特別頻繁,導致蒸汽壓力波動幅度大。對比效果如圖11所示。中間部分為Profit Loop控制,前后兩端為傳統PID控制。(第一條曲線為發電機有功功率曲線,第二條曲線線為主蒸汽壓力,第三條曲線為給煤機轉速,第一幅圖中的直線為控制器狀態)。
從圖11中還可以看出,當為Profit Loop控制時,發電機的有功功率變化比較平穩,而為傳統PID控制時其變化頻率比較大,這是由于鍋爐的主蒸汽壓力和負荷相互影響的結果。也就是說發電機有功功率隨著鍋爐主蒸汽壓力波動的變化而變化。因此主蒸汽壓力的波動狀況可以直接通過發電機的有功功率做出判斷。
圖12為Profit Loop控制時4#機組運行曲線,通過對數據統計,Profit Loop控制時主蒸汽壓力標準差為0.02~0.04。從圖中可以看出Profit Loop控制時蒸汽壓力穩定,另外一個優勢就是給煤機轉速平穩,這對執行機構是特別有益的,達到了廠方所希望的目標。
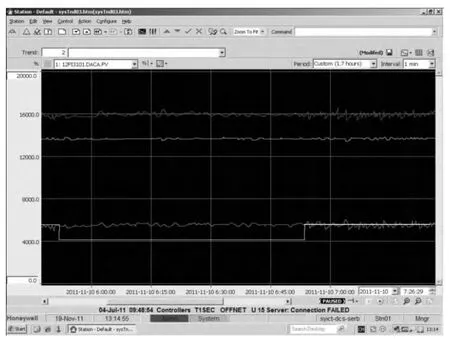
圖11 4#機組蒸汽壓力的Profit Loop控制與PID控制對比圖
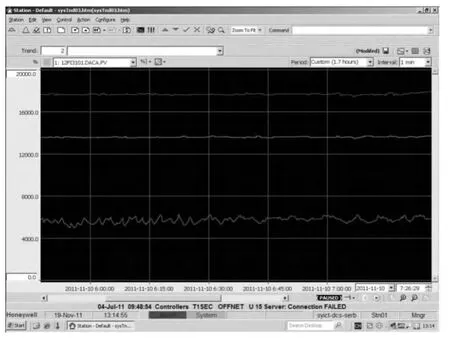
圖12 4#機組蒸汽壓力控制的Profit Loop控制曲線
8 結束語
霍尼韋爾PKS系統的Profit Loop作為一種模型預測控制技術,在遼寧華錦熱電廠鍋爐系統中得到了成功應用,受到了廠方得好評。該技術減小了主蒸汽壓力的偏差而且使控制量輸出平穩,達到了經濟節能的目的,具有廣闊的應用前景。
[1]張磊,張立華.燃煤鍋爐機組[M].北京:中國電力出版社,2006.
[2]趙寧,錢光燦.一種新型控制器的應用[J].自動化博覽,2008,S1:192-194.
[3]薛美盛,孫德敏,吳剛.火電廠鍋爐主蒸汽壓力的階梯式廣義預測控制[J].中國科學技術大學學報,2002,41(6):685-689.
[4]張子棟,王懷彬.鍋爐自動調節[M].哈爾濱:哈爾濱工業大學出版社,1994:15-20.
[5]舒迪前.預測控制系統及其應用[M].北京:機械出版社,1996:15-20.
[6]徐立鴻.預測控制的研究現狀及問題[J].控制理論與應用,1994,11(1):121-125.
[7]Dean E K,Thomas A B.Robust steady-state target calculation for model predictive control[J].AIChE Journal,2000,46(5):1007-1022.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
