導體棒在磁場中的轉動問題研究
2014-05-25 00:29:47黃濤
物理通報 2014年12期
關鍵詞:磁場
黃濤
(宜城市第一高級中學 湖北襄陽 441400)
曹立鋒
(宜城市第三高級中學 湖北襄陽 441400)
導體棒在磁場中的轉動問題研究
黃濤
(宜城市第一高級中學 湖北襄陽 441400)
曹立鋒
(宜城市第三高級中學 湖北襄陽 441400)
用經典物理的方法研究了導體棒在磁場中的轉動規律,并用MathCAD2001軟件進行了數值模擬.
導體 磁場 轉動 求解數值 模擬
1 題目
如圖1所示,一半徑為R的半圓形光滑軌道豎直放置(導軌電阻忽略不計),以過最低點的向右切線為x軸,以豎直向上為y軸建立平面直角坐標系x Oy.在y>0范圍內存在一垂直紙面向里的磁場,磁感應強度B與坐標值y成正比,即B=ky(k>0).在半圓形軌道上有一根導體棒質量為m,電阻為r,導體棒所對的圓心角為α,導體棒左端與軌道的左端最高點對齊.當把導體棒由靜止釋放時,試分析導體棒的運動規律.
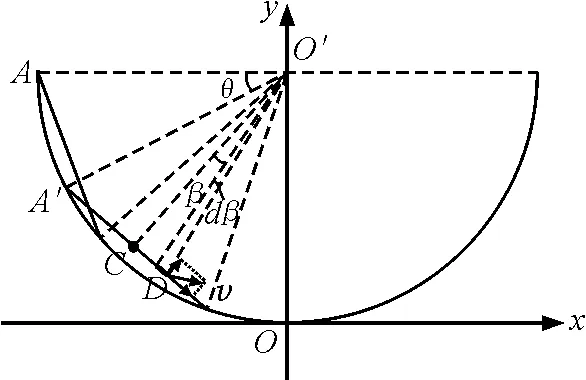
圖1
2 規律分析
2.1 導體棒的動力學方程
設某一時刻導體棒的A點轉過θ角,此時導體棒的角速度為ω=,固定轉軸的剛體的動力學方程[1]

式(1)中I為導體棒的轉動慣量,α為導體棒所對的圓心角,L為導體棒中心到O′的距離為導體棒角加速度,M安為導體棒的安培力矩.
2.2 導體棒的轉動慣量[1]


2.3 導體棒的感應電動勢[2]
以棒的中點為界,下半部分與上半部分的切割速度方向相反,導體棒在圖示位置時,設質心的角速度為ω=θ·,導體棒各點的速度在沿棒方向上的分量均為Lθ·,導體棒上的D點對應的磁感應強度為


根據對稱性可知導體棒的上半部分對應的電動勢為

2.4 安培力的合力矩

安培力的合力矩的方向為順時針方向與重力的力矩方向相反,所以導體棒的動力學方程為

由于導體棒的轉動慣量為
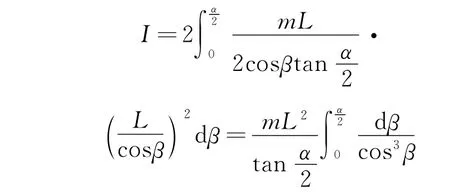
可得導體棒運動的微分方程

式中的兩個定積分可以查表[3]求出.
2.5 用MathCAD2001數值模擬

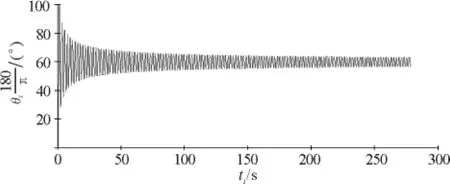
圖2 轉過的角度與時間關系圖
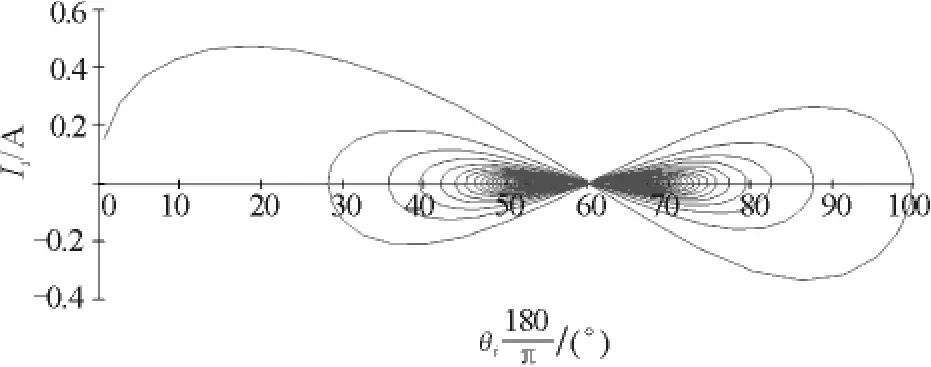
圖3 感應電流與轉過的角度的關系

圖4 導體棒的角速度與轉過的角度的關系

圖5 感應電流與時間的關系圖
3 圖像分析
由圖2和圖5可知導體棒的運動為阻尼振動,因為導體棒減少的機械能轉化為電能,所以它轉動的最大角度在減小,最后會停止在圓軌道的最低點,此時角度為60°;由圖3可知導體棒在運動到最低點的過程中,感應電流先增大后減小,再向右運動過程中感應電流反向先增大后減小,以后周而復始但最大電流在減小;由圖4可知導體棒在下降的過程中角速度先增大后減小,以后周而復始但最大角速度在減小.
1 周衍伯.理論力學教程(第二版).北京:高等教育出版社,1997.186~188,173~175
2 趙凱華,陳熙謀.電磁學(下冊)(第二版).北京:高等教育出版社,1997.479~485
3 四川大學數學系高等數學教研室.高等數學(物理類專業用第三版第一冊).北京:高等教育出版社,1997.372~373
2014- 05- 05)
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
數學物理學報(2022年1期)2022-03-16 06:14:50
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化(高中版.高考數學)(2017年3期)2017-05-04 07:15:09
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
電子制作(2016年1期)2016-11-07 08:42:44
Coco薇(2016年1期)2016-01-11 16:53:24
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:23