履帶行駛系統數學模型及張緊力計算
2014-05-25 00:34:02馬星國潘仕衛尤小梅龔雪蓮
振動與沖擊 2014年3期
關鍵詞:模型
馬星國,潘仕衛,尤小梅,葉 明,龔雪蓮
履帶行駛系統數學模型及張緊力計算
馬星國1,潘仕衛1,尤小梅1,葉 明2,龔雪蓮2
履帶是履帶行駛裝置的重要部件之一。其功能是保證車輛在無路地面上的通過性,降低車輛的行駛阻力。它支撐負重輪并為其提供一條連續滾動的軌道。它通過與地面的作用,將地面的牽引力、附著力和地面制動力傳給車體,使車輛能正常運動。履帶張緊力對于履帶行駛系統的性能有深刻影響。張緊力過大,履帶剛度太大,起不到緩沖作用,會增加履帶和底盤部件摩擦,能耗嚴重,并有斷帶危險;張緊力過小,使得履帶松弛,容易脫帶、耙齒,造成履帶失效,車輛癱瘓。為提高車輛的綜合性能,需要在各種行駛狀況下給履帶提供一個最佳的張緊力,因此張緊力的計算成為研究的重點。
Hub等[1]根據某履帶車輛的模型,提出履帶誘導輪附近張緊力的計算方法。Ma等[2]提出一種新的履帶車輛負重輪與地面的作用的動力學模型,并且通過仿真驗證其正確性。Park等[3]將低速履帶環看成柔性帶,通過建立履帶的數學模型分析履帶車輛的行駛性能。Al-Milli等[4]著重分析轉向過程中履帶與地面的作用機理,建立其數學模型,并且對干沙路面車輛通過性進行分析。本文分別對主動輪、負重輪以及誘導輪分別進行受力分析,最終得出各輪附近張緊力的表達式,為下一步控制履帶張緊力奠定基礎。
1 履帶系統力學特性
履帶車輛的履帶系統包括主動輪、誘導輪、負重輪、托帶輪和履帶板組成,由83塊履帶板,5個負重輪,3個托帶輪,主動輪、誘導輪以及張緊裝置。圖1從整體對履帶系統進行受力分析,在分析計算時,將履帶系統分成負重輪和誘導輪為二部分。
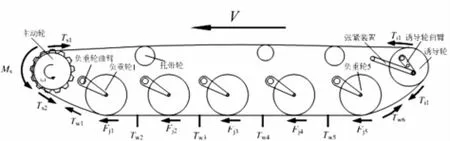
圖1 履帶行駛系統受力模型Fig.1 Mechanicalmodel for tracked vehicle
由于行駛過程各輪以及各輪曲臂慣性力及慣性力矩的量級遠小于各輪周圍張緊力,因此在此忽略不計。Ts1和Ts2是主動輪上、下支履帶的張緊力,Ms為主動輪轉矩,其關系為:

由于主動輪前置,忽略主動輪和誘導輪之間的履帶板的重力和振動以及托帶輪的影響時,可認為主動輪與誘導輪周圍上支履帶的張緊力Ts1與Ti1近似相等,主動輪下支履帶張緊力Ts2與Tw1相等,誘導輪下支履帶張緊力Ti1與Tw6近似相等,即為:
1.1 負重輪裝置動力學模型
圖1所示負重輪裝置包括負重輪以及負重輪曲臂。第1,2,5輪采用扭桿加液壓緩沖器的懸掛裝置,3,4輪只使用扭桿懸掛裝置。負重輪與曲臂計算模型最終推導出地面通過履帶給負重輪的力。
1.1.1 負重輪曲臂動力學模型
負重輪曲臂主要受到車體通過旋轉副給它的反力和力矩,以及負重輪通過旋轉副給它的反力,由于忽略曲臂質量過小,忽略曲臂質量影響。如圖2所示,曲臂繞P點的運動方程為:

式中:Mwai為曲臂繞P點轉矩,Rwxi和Rwyi分別為負重輪對曲臂x和y方向作用力,lwai為P點與負重輪中心的距離。
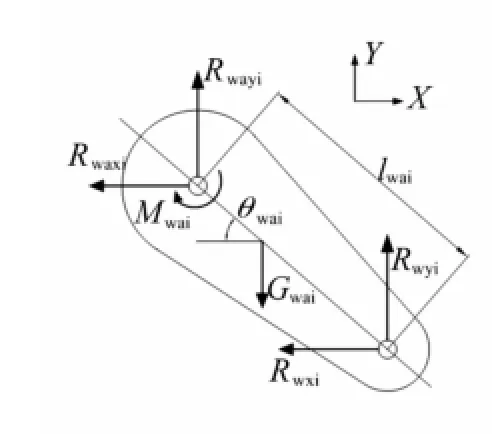
圖2 負重輪曲臂力學模型Fig.2 Mechanical model forwheel arm

圖3 第1負重輪力學模型Fig.3 Mechanical model for the wheel 1
1.1.2 負重輪周圍張緊力計算
車輛運動過程中,每個負重輪都會與一個履帶板接觸。若將負重輪和與其接觸的履帶板看成一體,履帶板質量過小,重力忽略不計。單側負重輪共5個,第1與第5負重輪處的履帶受力與地面成一定角度,因為需要將其單獨分析,中間3個負重輪動力學特性一致,只需分析一個即可。
(1)第1負重輪動力學模型
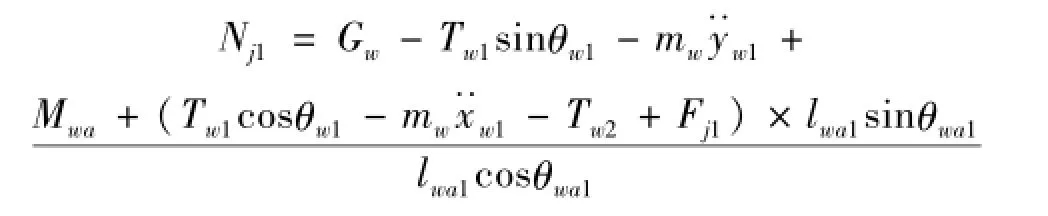
如圖3所示,負重輪受到曲臂通過旋轉副給它的反力以及自身重力,與其接觸的履帶板受地面對其的法向作用力Nj1、兩側履帶板給它的張緊力Tw1、Tw2以及牽引力Fj1,忽略負重輪相對車體加速度,可以列出動力學平衡方程:
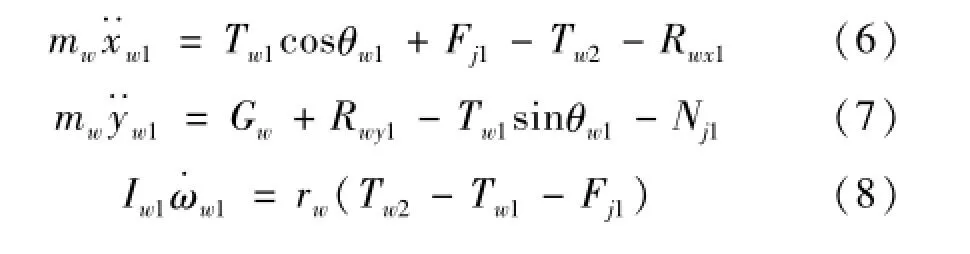
式中:Rwx1和Rwy1為曲臂對負重輪x和y方向作用力,Iw1是負重輪轉動慣量,Gw為負重輪重力,rw為負重輪半徑。
將方程(6)、(7)、(8)與方程(5)聯立得:
(2)中間負重輪的動力學模型
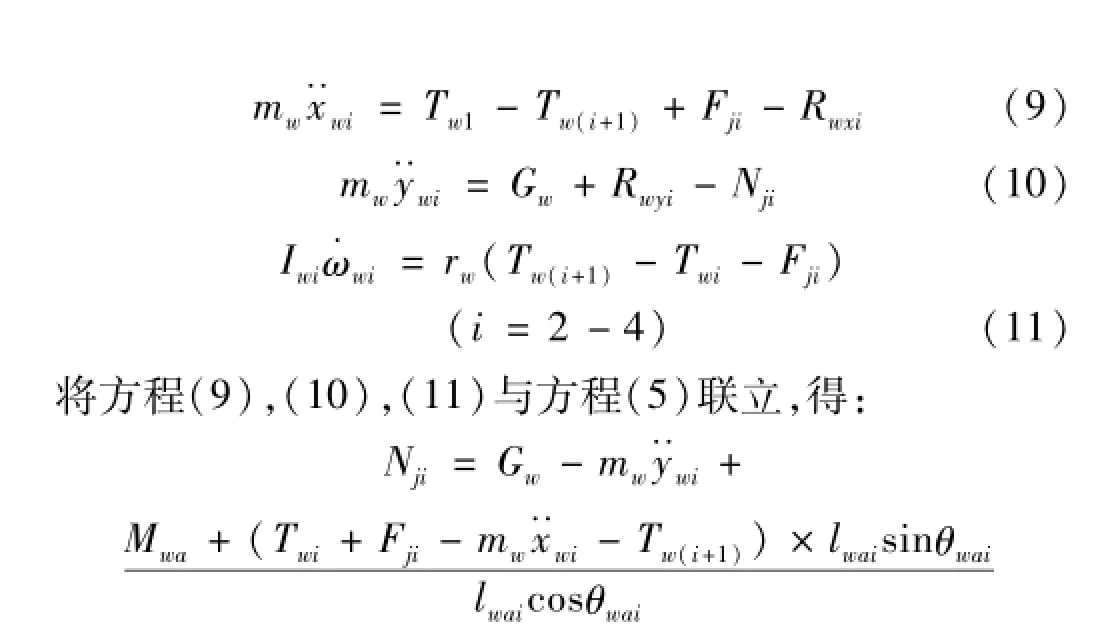
中間三個負重輪受力情況如圖4所示。負重輪受到曲臂通過旋轉副給它的反力、負重輪重力,與其接觸的履帶板受到其兩側履帶板給的張緊力Twi、Tw(i+1),地面對其法向作用力Nji以及牽引力Fji,動力學方程如下:
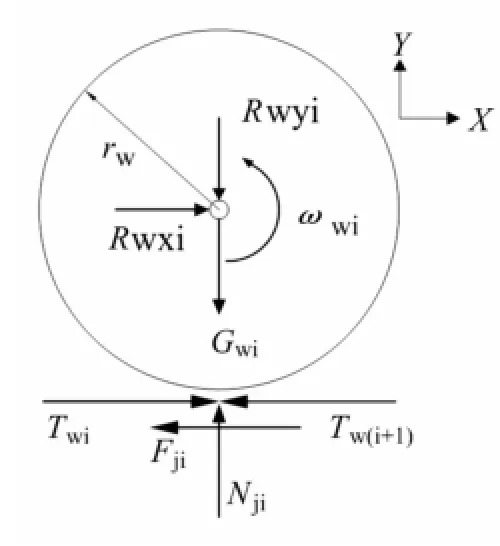
圖4 中間負重輪力學模型Fig.4 Mechanicalmodel for themiddle wheels
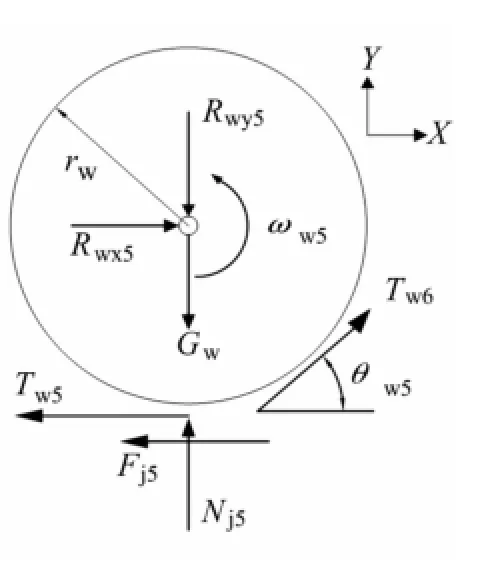
圖5 第5負重輪力學模型Fig.5 Mechanical model for wheel 5
(3)第5負重輪的動力學模型
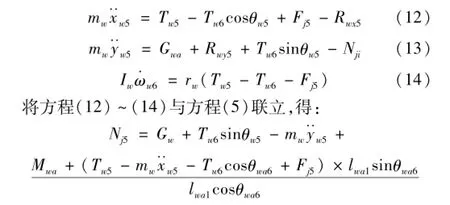
如圖5所示,負重輪受到曲臂通過旋轉副給它的反力、自身重力,與其接觸的履帶板受到兩側履帶給的張緊力Tw5、Tw6,地面對其法向作用力Nj5以及牽引力Fj5,動力學方程如下:
1.2 誘導輪周圍張緊力的計算
誘導輪受到張緊裝置和誘導輪曲臂支撐,結構如圖6,曲臂上端與車體鉸接于P0點,誘導輪與曲臂鉸接于P1點,張緊裝置一端與車體鉸接于P3點,另一端與P2點連接。調整張緊力的過程是:張緊裝置液壓增加時,推動曲臂繞著P0點逆時針旋轉,帶動誘導輪旋轉中心P1繞著P0向右上方移動,即為帶動誘導輪后移,履帶被拉伸,張緊力增加;反之,液壓減小時,曲臂反向旋轉,誘導輪前移,張緊力減小。影響誘導輪周圍履帶張緊力大小的主要因素:張緊裝置對曲臂作用力、誘導輪兩側履帶角度的變化、曲臂的角度變化以及誘導輪運動等。
1.2.1 誘導輪動力學模型
圖6所示由于誘導輪周圍履帶板質量很小,在此忽略履帶板質量影響。誘導輪上支履帶受張緊力Ti1,其與水平方向夾角θ1;下支履帶受張緊力Ti2,其與豎直方向夾角為θ2,計算方程如下:
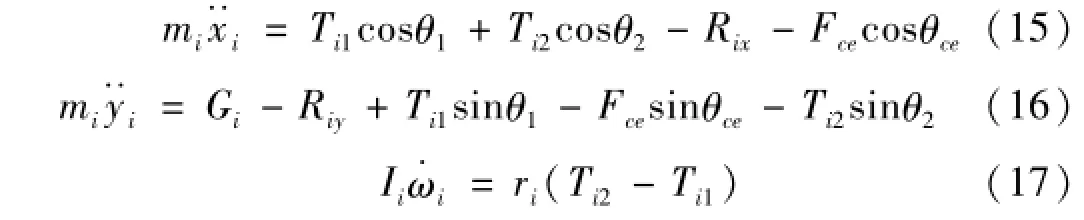
式中:Fce為誘導輪周圍履帶旋轉的離心合力,與水平夾角θce,旋轉副P1對誘導輪的作用力為Rix和Riy,誘導輪重力為Gi,Ii為誘導輪轉動慣量,半徑為ri。
進一步推廣式(27),對于ω條交點軸線的公差累積,設第τ條交點軸線的圓柱域為2Tτ,τ=1,2,,ω,則沿Q和Lv方向的累積公差tQ和tLv為:
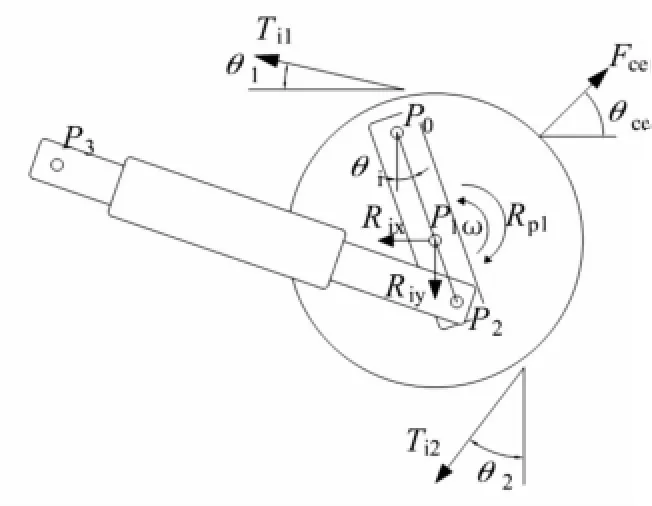
圖6 誘導輪受力分析Fig.6 Mechanicalmodel for idler
忽略車輛的滑移和滑轉,誘導輪的角速度為ωi,單位質量為ρ,Fce和θce的計算公式為:

誘導輪與其附近托帶輪以及負重輪的幾何關系如圖7所示,通過分析,得到θ和θ的計算關系式:

式中:rr為托帶輪半徑,lΔx1與lΔy1為P0與P6的x與y向距離,l1為P0到P1距離。

式中:lΔx3和lΔy3為P1與P4點x和y向距離,lΔx2和lΔy2為P1與P5點x和y向距離。
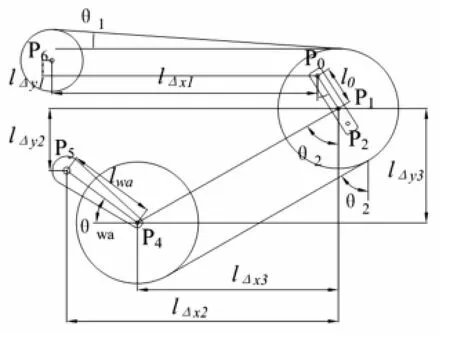
圖7 負重輪、拖帶輪、誘導輪位置關系Fig.7 Relation between wheel,roller and idler
1.2.2 誘導輪曲臂力學模型
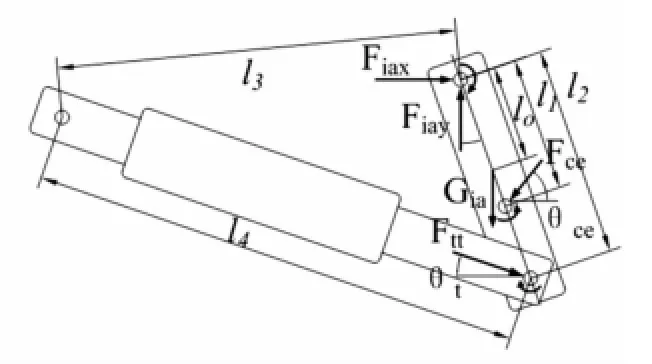
圖8 誘導輪曲臂受力分析Fig.8 Mechanicalmodel for idler arm
如圖8所示,曲臂主要受誘導輪通過旋轉副給它的反力,車體通過旋轉副給它的反力,張緊裝置給它的作用力Ftt,曲臂繞P0點的運動方程為:
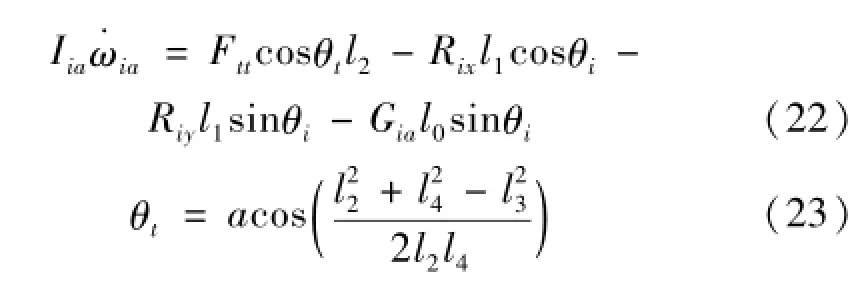

式中可以看出,誘導輪處張緊力不管處于任何工況下只與誘導輪的角速度、加速度、曲臂轉角、張緊裝置壓力和長度有關。這些變量可以直接從履帶車輛整車的動力學仿真中得到。由方程(2)、(1)、(3)、(4),可以分別求出Ts2、Ts1、Tw6、Tw1。車輛行駛的牽引力Fji可以求出,因此Twi都可以求出。履帶與地面接觸力Nji只與負重輪加速度、負重輪曲臂擺角、牽引力和兩側履帶張緊力有關,同樣這些力也可以從動力學仿真得到。
2 公式計算和軟件仿真的結果對比
在多體動力學軟件Recudyn中使用Track(HM)建立履帶車輛的動力學模型,共有166塊履帶板,整車共有1162個自由度。通過多體動力學模型,可以使用Recurdyn軟件可以測得不同工況下誘導輪的角速度、加速度、曲臂轉角、張緊裝置壓力等值,將變量值代入Ti1,即得到不同工況下Ti1,同理可以得到Nij曲線,可以與Recurdyn中仿真結果進行對比驗證,來驗證計算的準確性。
2.1 平路直行
2.1.1 誘導輪張緊力Ti1對比
在平坦路面上,選用干沙與堅實兩種土壤,車輛在0~5 s內在自身重力作用下落至水平路面,在減震器作用下迅速吸振后處于水平靜止狀態;在5~8 s內車輛開始加速,由0 km/h加速到20 km/h。圖9和10分別是車輛在堅實和干沙行駛時誘導輪處張緊力曲線對比圖。可以看出,堅實路面行駛時,在加速階段,主動輪力矩增大,上支履帶張緊,所以誘導輪周圍張緊力有個明顯上升趨勢,然后受到張緊裝置調整,張緊力又開始降低,最后加速過程結束后,車輛均速行駛后,張緊力變化趨于穩定;干沙也同堅實規律基本相同,不過由于受到地面影響,車輛在干沙路面行駛穩定性弱,導致干沙路面張緊力波動幅值大,峰值大。計算曲線可以看出,加速過程中主動輪力矩作用,張緊力先加后減,加速結束后,張緊力變化較小,因為計算分析忽略慣性以及履帶板與誘導輪瞬時碰撞的因素,所以沒有突出的峰值,計算曲線與仿真曲線規律大致相同。
2.1.2 負重輪與地面法向力
如圖11、12所示為負重輪與地面法向力的仿真與計算曲線,任意一塊履帶板沿著履帶環轉一周,它與5個負重輪依次接觸一次,圖中可以清楚看出5個峰值為一組,并且按著負重輪1~5排列,不管堅實路面還是干沙路面,第1,2,5輪處接觸力的值要大于其他的值,是由于第1,2負重輪處于履帶前端,行駛中受到地面沖擊作用大;第5負重輪處于履帶環尾部,同樣受到沖擊較大,并且受到誘導輪下支履帶張緊力的作用,所以其與地面接觸力較大。由于公式推導中忽略由于地面激勵產生的振動沖擊作用,所以在第5負重輪處接觸力同樣較大,兩者變化規律完全相符,因此公式準確度較高。
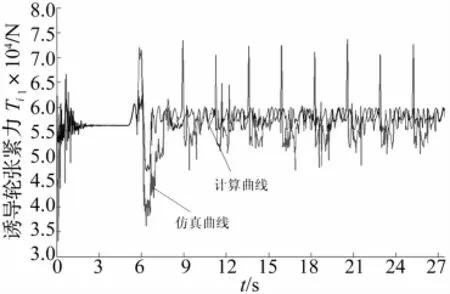
圖9 堅實路面直行Ti1曲線Fig.9 Comparison of force Ti1on solid road
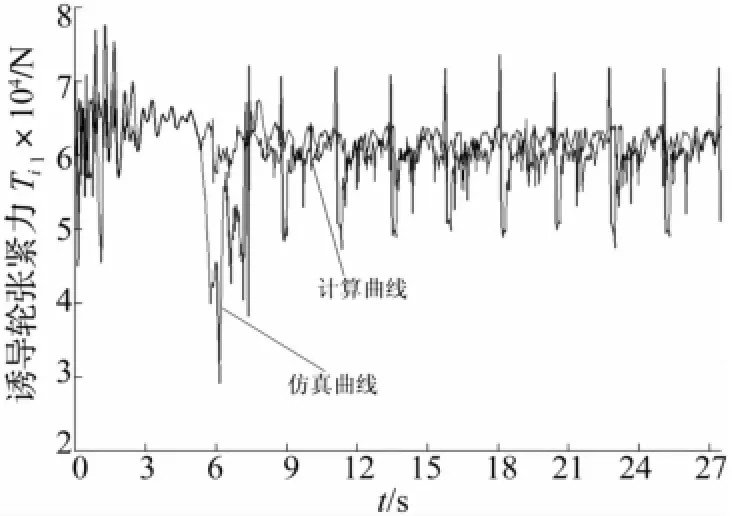
圖10 干沙路面直行Ti1曲線Fig.10 Comparison of force Ti1on sand road
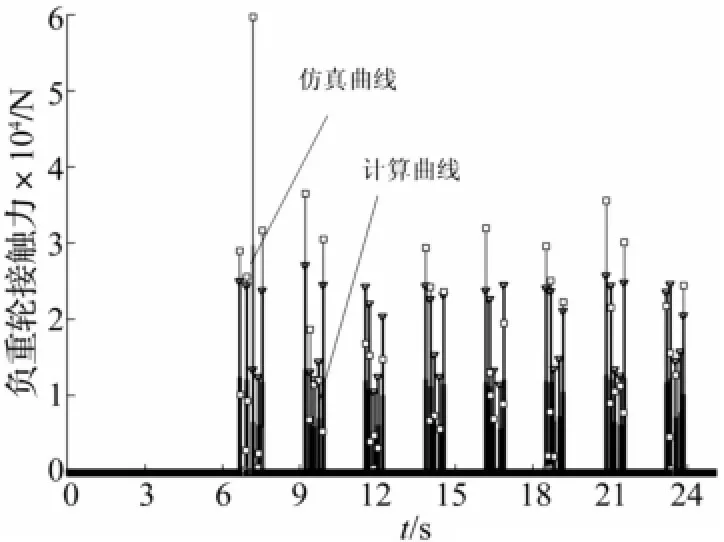
圖11 堅實路面直行Nji曲線Fig.11 Comparison of force Njion solid road
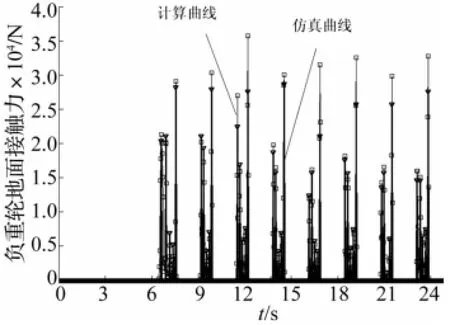
圖12 干沙路面直行Nji曲線Fig.12 Comparison of force Njion sand road
2.2 平路轉彎
車輛在平坦路面上,同樣是干沙與堅實兩種土壤,車輛在0~5 s內在自身重力作用下落至水平路面,在減震器作用下迅速吸振后處于水平靜止狀態;在5~8 s內從0 km/h加速到20 km/h,左側履帶保持速度不變,右側履帶速度從20 km/h減到-18 km/h,圖13、14為堅實路面轉向時左右兩側履帶張緊力曲線。堅實路面轉向時,兩側履帶都受到力矩作用,在右側履帶減速之后,左側主動輪維持之前速度不變,兩側履帶所受力矩左側大于右側,所以左側履帶張緊力較大,右側履帶張緊力較小。張緊力計算結果仍然與仿真結果大致相同,只是計算結果變化幅度小,由于計算公式忽略慣性影響,以及地面沖擊作用,所以其值波動較小,相對平穩。圖15、16為干沙路面轉向時左右兩側履帶張緊力曲線。干沙路面因為干沙路面影響,張緊力的值以及變化范圍稍大于堅實路面,但是其變化規律與堅實路面一樣。
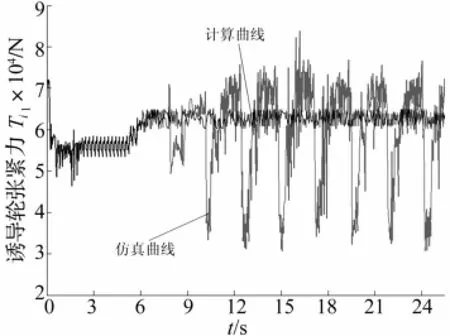
圖13 堅實路面轉向左側Ti1曲線Fig.13 Comparison of left track force Ti1steering on solid surface
3 結 論
(1)根據仿真曲線與計算曲線的對比,可知論文推導建立的公式可以反映履帶張緊力變化規律,其結果與仿真結果符合度高。由此可知,論文建立的履帶張緊力的數學公式是正確的。
(2)任意工況下,通過得到的角速度、加速度、曲臂轉角、張緊裝置壓力和長度等數據,代入公式,可以求出誘導輪周圍履帶板張緊力的值。通過誘導輪周圍張緊力可以求出履帶主動輪、負重輪處張緊力,也可以求出負重輪與地面的接觸力及整個履帶的受力等。
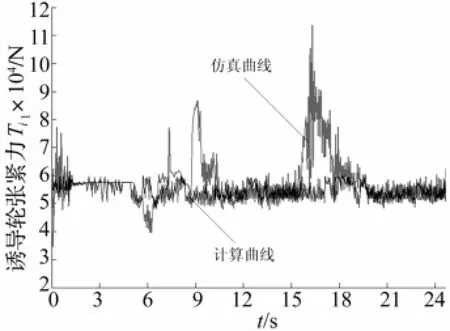
圖14 堅實路面轉向右側Ti1曲線Fig.14 Comparison of right track force Ti1steering on solid surface
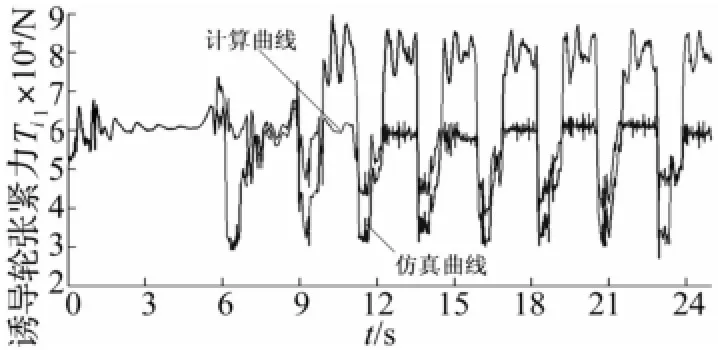
圖15 干沙路面轉向左側Ti1曲線Fig.15 Comparison of left track force Njisteering on sand surface
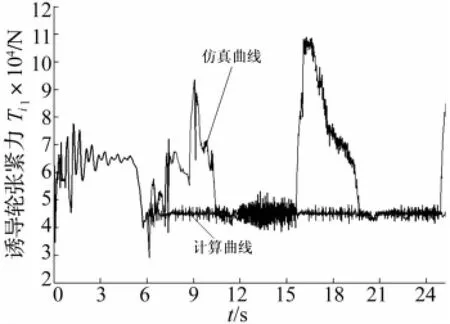
圖16 干沙路面轉向右側Ti1曲線Fig.16 Comparison of rightforce Njisteering on sand surface
[1]Hub K,Cho B H.Development of a track tension monitoring system in tracked vehicles on flat ground[J].Proceedings of the Institution of Mechanical Engineers Part D:Journal of Automobile Engineering,2001,215(5):567-578.
[2]Ma ZD,Perkins N C.A track wheel terrain interactionmodel for dynamic simulation of tracked vehicles[J].Vehicle System Dynamics,2002,37(6):401-421.
[3]Park W Y,Chang Y C,Lee S S.Prediction of the tractive performance of a flexible tracked vehicle[J].Journal of Terramechanics,2008,45:13-23.
[4]A l-Milli S,Seneviratne L D,Althoefer K.Track-terrain modeling and traversability prediction for tracked vehicles on soft terrain[J].Journal of Terramechanics,2010,47:151-160.
(1.沈陽理工大學機械工程學院,沈陽 110159;2.北京北方車輛集團有限公司,北京 100072)
根據高速履帶車輛履帶系統的結構,分析履帶系統各部分受力,建立負重輪及其曲臂、誘導輪及其曲臂的數學模型,得到履帶系統各部位的張緊力以及地面對負重輪法向力的計算公式。建立Recurdyn整車動力學模型,進行多工況下的仿真,得到履帶張緊力、以及負重輪法向力的仿真結果,將仿真與公式計算結果相對比,結果表明:公式計算結果與RecurDyn仿真結果具有很好的符合度,驗證了公式的準確性。本研究結果為履帶行駛系統張緊力的控制奠定了基礎。
履帶車輛;張緊力;動力學模型
Mathematicalmodels for a caterpillar driving system and its tension calculation
MA Xing-guo1,PAN Shi-wei1,YOU Xiao-mei1,YEMing2,GONG Xue-lian2
(1.Shenyang Ligong University,Shenyang 110159,China;2.Beijing North Vehicle Group Corporation,Beijing100072,China)
According to the structure of a tracked system in tracked vehicles,the forces acting on componentsof the tracked system were analyzed and mathematicalmodels for componentswere established.The formulas for track tensions and normal forces between wheels and ground were derived with themathematicalmodels,and the formulas were verified by comparing the calculated resultswith the formulas to the simulation resultswith Recurdyn dynamcimodel.The formulas provided a theoretical basis for control of tensions of a tracked system.
tracked vehicle;tension;dynamic model
TH212;TH213.3
A
2013-01-06 修改稿收到日期:2013-03-11
馬星國男,博士,教授,1963年2月生
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19