基于Trio控制器的吸收式造波機運動控制系統設計
2014-05-08 11:51:58張小樂呼英俊
天津科技大學學報 2014年2期
張小樂,呼英俊
(天津科技大學機械工程學院,天津 300222)
造波機是在實驗水池中模擬波浪的設備,可人工控制產生不同類型的波浪,模擬實際海浪對船舶或各種建筑物的作用.但因為實驗水池的長度有限,造波機對模型或池壁的反射波會再一次反射,即波浪的二次反射,它會嚴重影響實驗結果.而吸收式造波機在產生擬需波浪的同時,能吸收實驗區域內的二次反射波,其原理是在推波板式造波的基礎上,通過采集、計算波浪數據,給推波板一個附加的二次位移,以消除反射波浪撞擊推波板形成的二次反射波,從而更真實地模擬海浪的運動[1].
現有吸收式造波機多采用工控機與控制卡的方式進行運動控制[2].這種方式提前設定工控機和控制卡的相關程序,硬件組成、連接及操作都比較簡單.其缺點在于集成化過高,擴展性、互換性不好,在不同造波環境、不同造波條件下難以通用;各種處理運動控制和參數采集的板卡全由工控機控制,還需進行模數轉換,延緩了控制命令傳輸和采集信號處理的時間,控制時效和精度不夠理想.
隨著計算機控制技術的發展,運動控制也逐漸網絡化、數字化.網絡化使控制更靈活、開放,數字化使控制更簡單、精確.采用PC和運動控制器相結合的控制方式,用PC作為信息處理平臺,可發揮PC的信息處理快、開放的程序語言及可在線網絡檢測和修復等優點;用控制器實現期望造波運動,可充分利用運動控制器中的運動算法和進行精確的軌跡控制.這種方式的信息處理速度快、運動控制精度高、開放擴展程度好、系統可靠性高,更適合吸收式造波[3–4].
本文針對吸收式造波,選擇支持網絡化、數字化的運動控制器,在程序設計中利用C語言應用廣泛、人機交互方便和 Fortran語言在數據處理上的優勢,并調用運動控制器的運動算法,使得造波運動程序設計、參數設置和數據分析都更簡單,較好地實現了吸收式造波.
1 運動控制系統的基本工作原理
吸收式造波機運動控制系統的工作原理見圖 1.
根據期望的波高周期數據,由上位機程序計算推波板的位移和時間控制信號,運動控制器接收后將其轉換為運動方向和速度的控制信號,伺服驅動器再將其轉換為脈沖信號驅動伺服電機運動,經執行裝置帶動推波板作相應的往復運動,推動水面產生波浪.在推波板前固定距離處設置 2個波高傳感器采集推波板前的波高信號.運動控制器根據反饋信號計算設定值與實測值之間的差值,并以此調整下一時刻控制推波板的位移,使之生成與反射波反相位的波,以消除二次反射波,實現吸收式造波;另一方面,波高信號反饋回PC,與期望波譜的數據對比,完成統計分析.
在吸收式造波機工作過程中,最重要的是要實時采集推波板前波高數據,迅速計算得出下一位移量并確保執行裝置及時響應,這就對運動控制器的性能及信號傳輸速度提出了較高的要求.
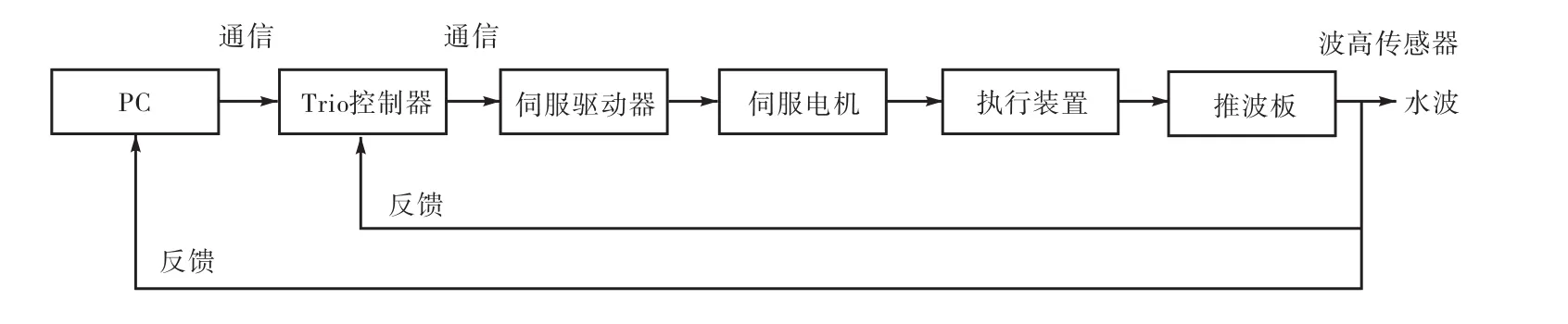
圖1 運動控制系統的工作原理Fig.1 Block diagram of the motion control system
2 運動控制器及其通信
2.1 Trio控制器
運動控制器選用 Trio Motion公司的 Trio MC224型數字獨立運動控制器,其融合了最新的控制理論和技術,具有多種控制和通信方式、多任務編程、可擴展性豐富等優點.它采用 32位 120~150,MHz的 DSP微處理器,計算速度快,控制精度高,滿足吸收式造波對控制器運算速度的要求;包含直線運動、梯形運動、曲線運動等多種軸運動軌跡控制模式,可完全脫離 PC獨立進行控制,在 PC出現通信故障等問題時,依然可以進行吸收式造波的控制.控制器采用模塊化設計,可連接擴展多種具有軸控制功能的子板,實現對多個伺服單元的控制,在大港池、多方向條件下造波也完全適用.控制器與 PC間通信可采用總線或網絡方式,如 PROFIBUS、DeviceNet、EtherNet/IP、CANopen 等方式;控制器與伺服驅動器通信可采用總線或數字式,如CANopen、EtherNet/IP、SERCOS等方式,多種通信接口使其應用擴展更廣泛.
2.2 EtherNet/IP通信
Trio控制器與PC之間選用EtherNet/IP通信協議,它是一種工業以太網的應用協議.相比于其他控制系統中常見的總線結構,工業以太網的標準更規范、更通用,在遠距離傳輸、組件成本、軟硬件資源等方面也更有優勢;而且可與普通網絡通連,利用網絡的在線監測,遠程控制也很方便,已成為現場設備控制網絡的發展趨勢.
EtherNet/IP協議采用Producer/Consumer通信模式,它不同于其他協議從源到點的指定模式,而是規定所有節點都可在同一時間讀取來自同一個源的數據[5].這種模式的效率更高,實時性更好,適用于在造波現場由PC向控制器發送信號指令.
Trio控制器面板配置有相關接口,通過網線即可實現連接;PC中基于Windows平臺建立EtherNet/IP網絡也較簡單,為組網和數據交換提供了很大便利.
2.3 SERCOS接口
在吸收式造波中,Trio控制器與伺服驅動器之間的通信最重要,要求快速、穩定、誤差最小地傳輸調整信號.而現有系統中多常用模擬接口,受噪聲影響較大、傳輸速度緩慢、精度不高、線路連接復雜,不能滿足吸收式造波高速、穩定的要求.基于數字化控制的設想,選用SERCOS數字接口.SERCOS接口是數字控制接口的唯一國際標準,具有較高精度的實時性和開放性,可保證快速建立數字連接、傳送參數、精確控制和智能診斷的實現.
SERCOS光纖網絡結構如圖2所示,其最主要的特點就是用光纖取代傳統多軸控制系統中的普通電纜,是全數字式的網絡通信方式,不會受到其他電氣系統的干擾,對噪聲的免疫能力很強,無信號漂移,傳輸精度高.其協議也規定了數據傳輸格式,對網絡通信帶寬的需求相對較低,通信速率大于 4,MB/s,通信周期小于 1,ms[6].相比傳統的模擬技術,SERCOS有效提高了工程速度,減少工程調試及維護時間,運行速度更快,精確度更高.
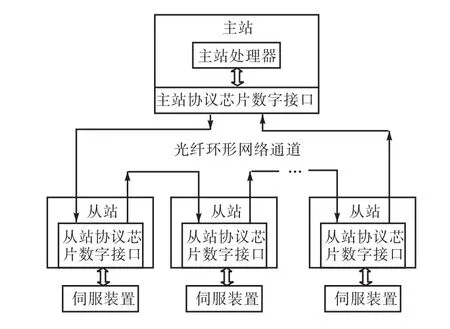
圖2 SERCOS光纖網絡結構Fig.2 SERCOS fiber-optic network structure
Trio控制器自帶 SERCOS通信子板模塊,選用的驅動器配置有 SERCOS接口,可以方便地用提供的線纜進行連接,實現SERCOS數字通信.
3 程序設計
在程序設計上采用混合編程調用的方法,采用C語言和 Fortran語言進行上位機程序設計,實現包括基本造波及吸收式造波的控制功能、系統的初始化設定、推波板的回零定位、目標波譜及造波參數的設定、數據統計分析及報警保護功能[7].
控制執行機構由Trio控制器自帶Trio Basic語言編寫運動控制程序程實現.編程通過 Motion Perfect平臺進行,然后下載到控制器中存儲和運行.Trio控制器提供ActiveX功能,可以根據設備的需要在計算機中用高級程序語言進行二次開發;提供 OCX Component功能,可以自動檢測控制器內的程序并與計算機中程序比較;計算機中有 VB、VC、C++等語言編寫的程序時,可直接調用其運動函數,復制到Trio處理器中進行運算處理和控制,方便進行操作.
4 實 驗
利用本文設計的控制系統,在天津水運工程科學研究所的實驗水槽中進行測試.水槽長 35,m,寬1,m,高 1.2,m,最大水深為 0.8,m.實驗時,將模擬的波譜或波高數據由主程序輸入,計算獲得控制推波板運動所需的數字控制信號,經由運動控制程序,驅動機械裝置帶動推波板運動.推波板往復運動的位移決定波高,往復運動的頻率決定波浪周期.板前設置2個波高傳感器,運用兩點法進行入反射分離,分別求得入、反射波高與周期[8].部分實驗數據見表1.對實驗數據的評價參考 JTJ/T234—2001《波浪模型試驗規程》,模擬規則波的平均波高和周期的允許偏差為±5%.結合表 1數據可以看出:非吸收式造波的波高數據受反射波的影響,誤差很大;而吸收式造波的實驗結果誤差小,滿足要求;本文設計的吸收式造波機的實驗誤差最小,精度最高.
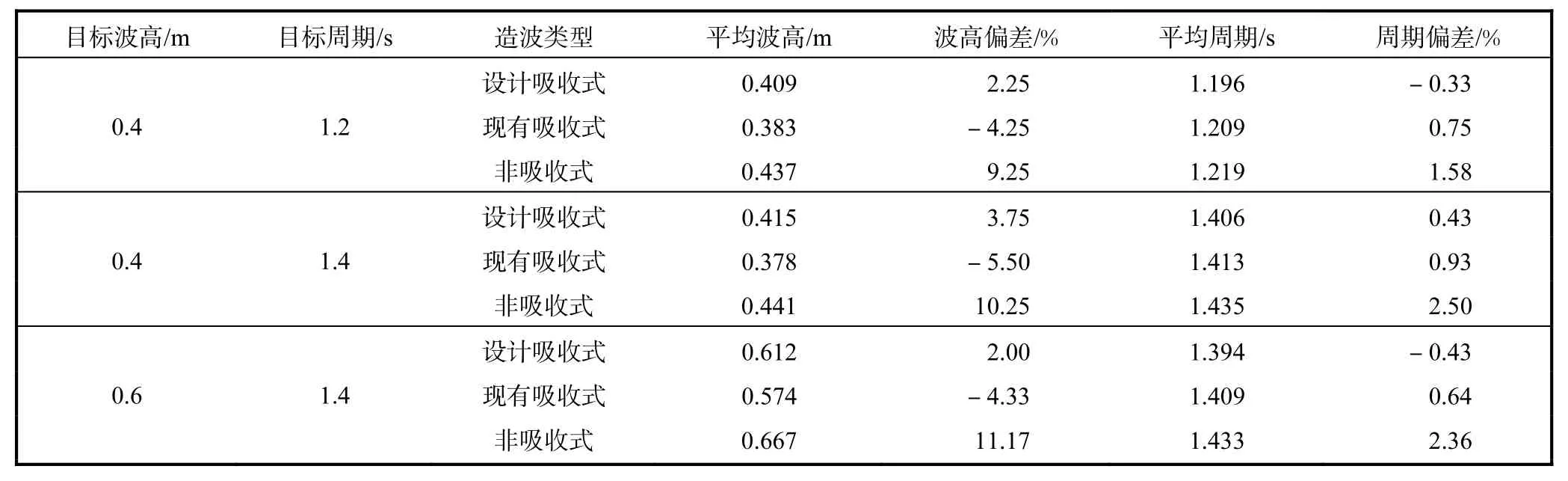
表1 各類型造波機造波實驗數據Tab.1 Experimental wave data of various types of wave maker
另外,程序可統計畫出實驗的波面過程圖.其目標波高 0.4,m、周期 1.4,s的實驗波面過程如圖 3所示.由圖 3可以看出:實驗過程中,非吸收式造波的波面波動較大,在很長的實驗時間范圍內都難獲得穩定的波高;現有吸收式造波機相比非吸收式造波,在波高穩定度上有明顯的進步,進行吸收造波之后的波高變得比較穩定,但由于控制系統不夠精確,與期望的波高還是有一定差距;而本文設計的吸收式造波機的波面最穩定,波高偏差最小.
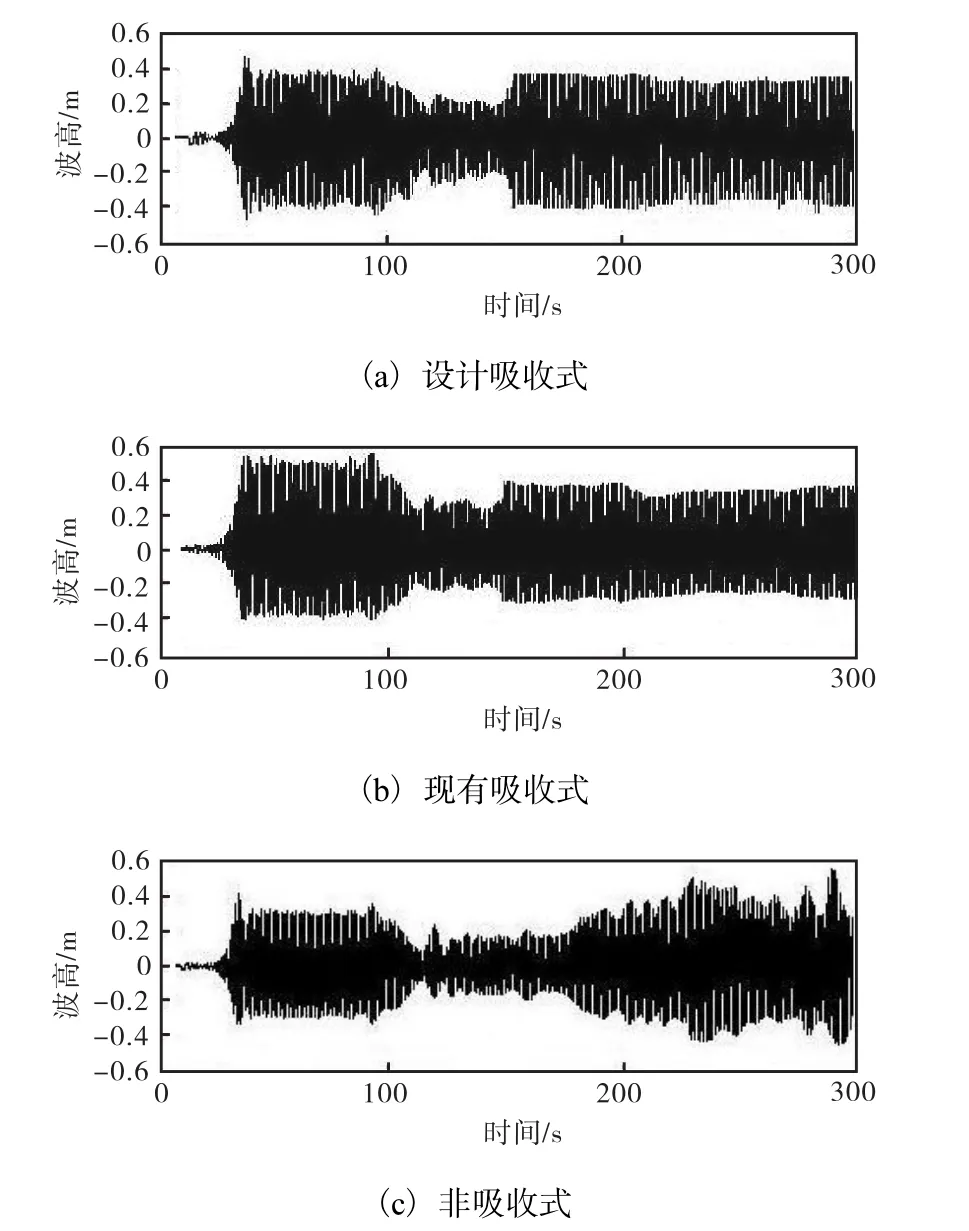
圖3 各類型造波機造波實驗波面過程圖Fig.3 Experimental wavefront process map of various types of wave maker
5 結 語
本文設計了吸收式造波機的運動控制系統,針對現有造波機的信號傳輸處理不及時、控制精度不理想問題進行改進.上位機程序設計采用混合編程的方式,對執行機構控制調用 Trio Basic語言,更好地實現了對推波板的運動控制.相比現有裝置,信號傳輸與處理完全采用數字信號,使控制系統響應更快,運行更穩定.實驗證明設計達到了預期效果.
[1] 王先濤. 吸收式造波機理論[D]. 大連:大連理工大學,2002.
[2] 張亞群. 造波機的控制及其實現[D]. 武漢:武漢理工大學,2007.
[3] 班華,李長友. 運動控制系統[M],北京:電子工業出版社,2012.
[4] 郗志剛,周宏甫. 運動控制器的發展與現狀[J]. 電氣傳動自動化,2005(3):12–16.
[5] 鄧昌建. 工業以太網通訊協議和接口技術研究[D]. 成都:電子科技大學,2005.
[6] 李琰,徐殿國,戚佳金,等. SERCOS接口應用技術研究[J]. 伺服控制,2006(5):26-28.
[7] 張瑞波,王收軍,朱國良. 基于VC6.0和FORTRAN語言的造波機控制軟件的研究與開發[J]. 制造業自動化,2008(8):49-52.
[8] 張瑞波. 港工波浪模擬設備的研究[D]. 天津:天津理工大學,2008.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國生殖健康(2019年3期)2019-02-01 06:12:26
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00