空間臂式補償機構軸承預緊力與系統剛度關系分析
2014-04-30 03:41:30郭萬存
中國光學 2014年6期
關鍵詞:系統
王 智,郭萬存
(中國科學院 長春光學精密機械與物理研究所,吉林 長春 130033)
空間臂式補償機構軸承預緊力與系統剛度關系分析
王 智*,郭萬存
(中國科學院 長春光學精密機械與物理研究所,吉林 長春 130033)
為了補償空間光學望遠鏡在軌跟蹤目標過程中受空間各種因素影響而導致的光學系統視軸和目標之間產生的相對移動和旋轉(即指向偏差和指向振蕩),設計由臂式補償機構控制望遠鏡補償與目標的相對運動。但由于臂式補償機構的尺寸和質量嚴格限制在一定范圍內,且望遠鏡尺寸很大,質量達3 000 kg,這種結構形式導致系統剛度很低。為了滿足控制系統提出的結構高剛度要求,在系統結構形式確定的情況下,分析施加軸承預緊力提高系統剛度的可行性。分析了軸承預緊力、軸承剛度和系統剛度之間的關系,獲得了軸承預緊力與系統固有頻率的關系。分析證明在系統結構形式確定的情況下,施加合適的軸承預緊力,可以提高系統的剛度,同時為軸承最佳預緊力的確定提供了一個有效的方法。
臂式補償機構;軸承;預緊力;剛度
1 引言
空間光學望遠鏡在軌跟蹤目標過程中,受軌道運動、姿態變化、控制系統的負載特性、振動等因素的影響,光學系統的視軸和目標之間將不可避免地產生相對移動和旋轉(即產生指向偏差和指向振蕩),從而導致成像質量下降。為了補償這些因素產生的影響,設計由臂式補償機構控制光學望遠鏡補償與目標的相對運動。
受艙內空間以及質量的限制,臂式補償機構的尺寸及質量嚴格限制在一定范圍內,而空間望遠鏡的質量達3 000 kg,尺寸巨大,這種結構形式導致系統剛度很低,而跟蹤及控制系統精度要求臂式補償機構的剛度盡可能高。臂式補償機構主要由X關節、Z關節、Y關節組成,在軌振動、沖擊以及低速工作模式,要求所用軸承有較高的軸向、徑向剛度;同時,臂式補償機構的跟蹤精度還要求軸承具有較高的定位精度和低的摩擦力矩。在這種情況下,為了提高臂式補償機構的剛度和精度,補償機構的關節在設計時采用配對、能預緊的角接觸球軸承。
對配對使用的角接觸球軸承施加合適的預緊力,可以提高軸承剛度、關節軸系的旋轉精度,減小振動噪聲,消除軸向游隙。在安裝軸承時,如果實際預緊力大于最佳預緊力,雖然可以獲得較高的關節軸系剛度及抗卸載能力,但會使軸承摩擦力矩過大,導致溫升加劇,降低軸承壽命;如果實際預緊力小于最佳預緊力,雖然摩擦力矩小了,但軸承剛度將不能滿足系統剛度的要求,在較大加速度下容易發射卸載,出現間隙。因此,施加預緊力的準確性對于軸承的性能以及系統的性能都有很大的影響[1-4]。
在系統結構形式確定的情況下,分析施加軸承預緊力提高系統剛度的可行性,通過分析軸承預緊力、軸承剛度和系統剛度的關系,獲得了軸承預緊力與系統固有頻率的關系,同時也為軸承最佳預緊力的確定提供了一個有效的方法。
2 臂式補償機構結構[5-9]
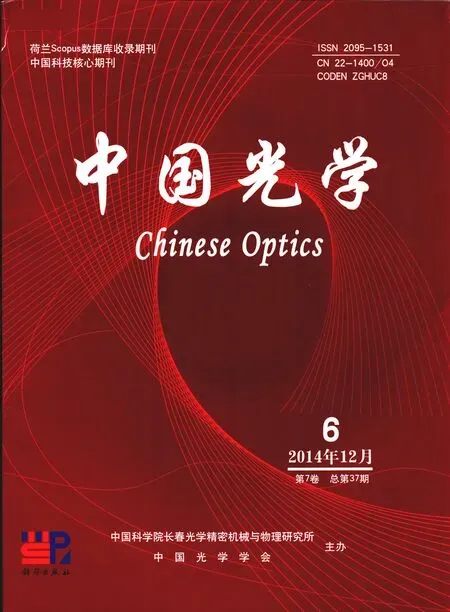
單個角接觸球軸承只能承受一個方向的軸向載荷,在承受徑向載荷時,會引起附加軸向力,必須施加相應的反向載荷。因此,角接觸球軸承需成對使用,且通過軸向定位預緊提高其剛度。考慮到臂式補償機構的工作模式及空間力、熱環境,各關節軸系軸承的配置均采用一端固定,另一端游動的方式,如圖1所示。考慮到空間望遠鏡在巡天、對地工作模式轉換時,臂式定位機構的負載慣量是變化的,因此,為了增加關節軸系的抗彎剛度,臂式補償機構(見圖2)各關節軸系固定端角接觸球軸承均采用如圖3所示的配對方式,采用軸向定位預緊;關節軸系游動端采用深溝球軸承,其內圈和軸之間可以滑動,以消除溫度變化對軸系產生的變形。
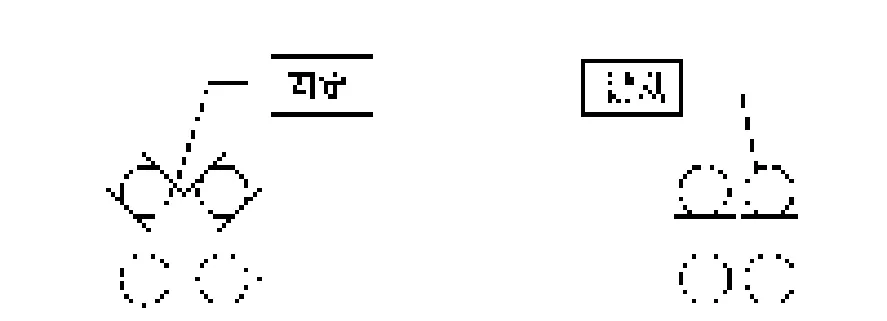
圖1 軸系軸承配置方式Fig.1 Bearing configuration of shafting
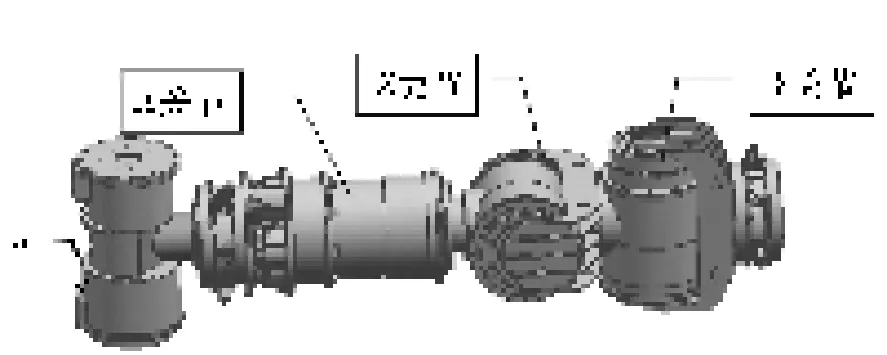
圖2 臂式補償機構模型Fig.2 Model of arm compensation mechanism
圖3 角接觸球軸承配對方式Fig.3 Partnership pattern of angle contact ball bearing
3 軸承預緊力與軸系剛度關系計算公式
采用臂式補償機構控制3 000 kg空間望遠鏡的這種結構形式,系統剛度很低。為了滿足跟蹤和控制精度對臂式補償機構提出的高剛度要求,提出從軸承的配置方式、軸承預緊力方面提高系統的剛度。因為,軸承的預緊力影響著軸承的剛度,軸承的剛度影響著關節軸系的剛度,關節剛度影響著系統的固有頻率。所以,通過分析軸承預緊力與軸承剛度、關節軸系剛度的關系,建立軸承預緊力與系統固有頻率的關系曲線,確定軸承最佳預緊力。
3.1 軸承預緊力與軸承剛度關系分析
關于臂式補償機構與空間光學望遠鏡工作狀態時的位置關系(見圖6),其Y、Z關節軸系僅受徑向載荷,軸承徑向剛度可以用簡化計算公式[10]獲得:

X關節軸系僅受軸向載荷,軸承軸向剛度可以用簡化計算公式獲得:

式(1)、(2)中:Dw為鋼球直徑,Z為單個軸承鋼球數目,α為接觸角,Fa0為所施加的軸向預緊力。
在設計臂式補償機構時,需要考慮系統的力學環境適應性(正弦、隨機),要能承受衛星發射過程的振動、沖擊。因此動態情況下,需要分析在徑向、軸向聯合負荷作用下軸承的剛度,采用近似的計算方法,軸承的剛度為[10]:
軸向剛度:
徑向剛度:

由軸承動態剛度的近似公式可以看出,聯合負荷情況下軸承的徑向剛度為純徑向負荷條件下徑向剛度的2倍左右,原因是軸向負荷的施加使原本只在徑向負荷下近一半鋼球承載的情況變成了幾乎所有鋼球承載,因此軸承徑向剛度成倍提高,所以軸向預緊力有利于提高軸承的徑向剛度。
3.2 軸承預緊力與關節軸系剛度之間的關系
(1)關節軸系固有頻率計算
Y、Z關節軸系固有頻率計算[11]:
由前面的分析可以得知,給配對使用的角接觸球軸承施加合適的預緊力,可以提高軸承的剛度,進而提高關節軸系的剛度。而關節軸系的剛度可以由其固有頻率來表征,靜態情況下Y、Z軸系可以簡化為如圖4所示的彈簧質量系統,該關節軸系的固有頻率為:
式中,Wn=f/2π,f為軸系固有頻率,m為軸系質量,k1、k2分別為柔性元件1,2的剛度,l1、l2分別為柔性元件1、2相對于振動體中心O的距離,l= l1+l2,I為振動體的轉動慣量。
由式(5)可以看出,Y、Z關節軸系的固有頻率取決于系統的質量、剛度及軸承的分布,在圖4所示的系統中,軸系的質量、轉動慣量及軸承的分布可以很容易計算出,所以Y、Z關節軸系的固有頻率就取決于軸承的剛度,即軸向定位預緊角接觸球軸承的剛度。
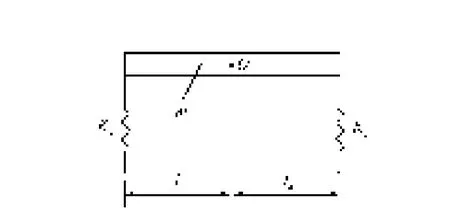
圖4 彈簧質量系統Fig.4 System of spring-mass
X關節軸系固有頻率計算[12]:
X關節僅受軸向載荷,X關節軸系的軸向振動模型如圖5所示,可以得到X關節軸系軸向剛度與固有頻率的關系:

式中,ωn=f/2π,f為X關節軸系固有頻率,m為軸系質量。
由式(6)可以看出,X關節軸系的固有頻率取決于定位預緊角接觸球軸承的剛度。
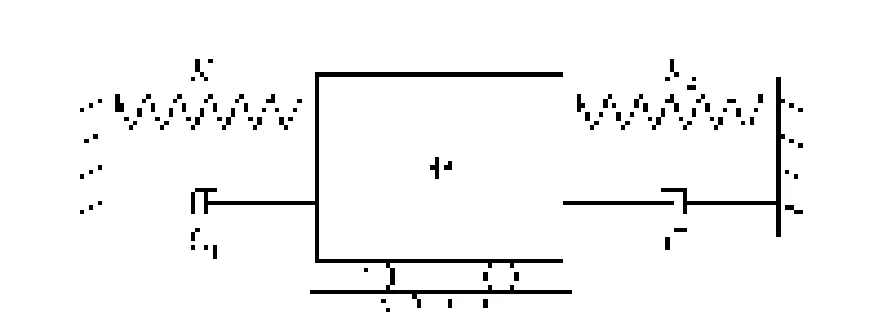
圖5 軸系軸向振動模型Fig.5 Axial dynamic model of a shafting
(2)軸承預緊力與軸系剛度的關系公式
Y、Z關節軸系:
臂式補償機構Y、Z關節軸系所用角接觸球軸承為71828C,由式(1)可知,軸向定位預緊角接觸球軸承的徑向剛度與所施加的預緊力有關;由式(5)可知,軸系的剛度與軸系的質量、角接觸球軸承的剛度及分布有關。綜合式(1)、(5)可以得到軸承預緊力與軸系固有頻率的關系:

X關節軸系:
臂式補償機構X關節軸系所用角接觸球軸承為71828C,軸承預緊力與軸系固有頻率的關系為:

由式(7)、(8)可以看出,在軸系結構已定的情況下,軸承的預緊力與軸系的固有頻率有關。
4 軸承預緊力與系統基頻的關系曲線
4.1 軸承預緊力與系統基頻的關系分析
臂式補償機構與空間望遠鏡的有限元模型如圖6所示。
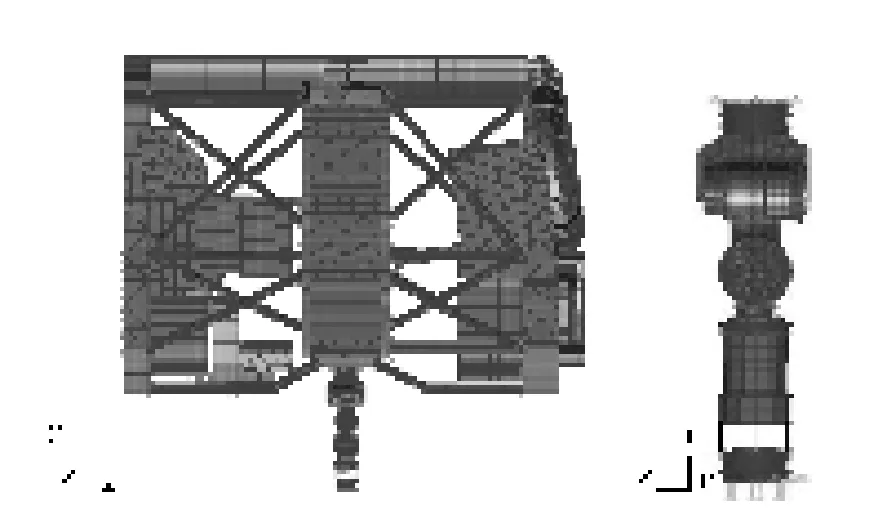
圖6 系統有限元模型Fig.6 Finite element model of system
(1)X關節軸承預緊力對系統基頻的影響分析
在圖6所示的系統有限元模型中,對X關節角接觸球軸承施加預緊力,Z、Y關節角接觸球軸承不施加預緊力。臂式補償機構與空間望遠鏡系統的一階模態頻率與X關節的角接觸球軸承預緊力關系如表1所示。
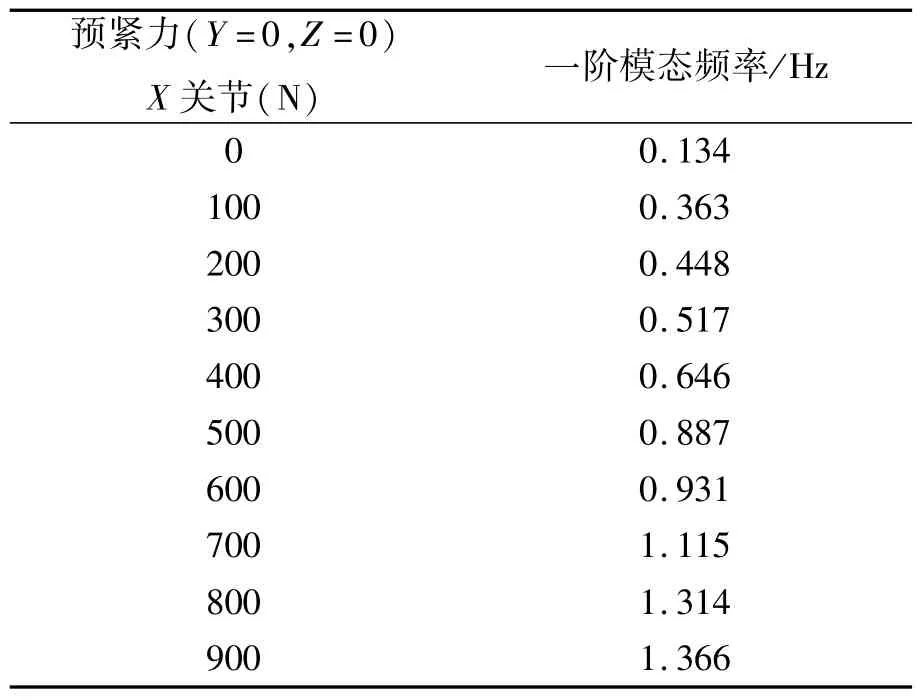
表1 系統一階模態頻率與X關節軸承預緊力關系Tab.1 Relationship between preload of X-joint bearing and first modal frequency of system
(2)Z關節軸承預緊力對系統基頻的影響分析
對Z關節角接觸球軸承施加預緊力,X、Y關節角接觸球軸承不施加預緊力。此時,臂式補償機構與空間望遠鏡系統的一階模態頻率與Z關節角接觸球軸承預緊力關系如表2所示。
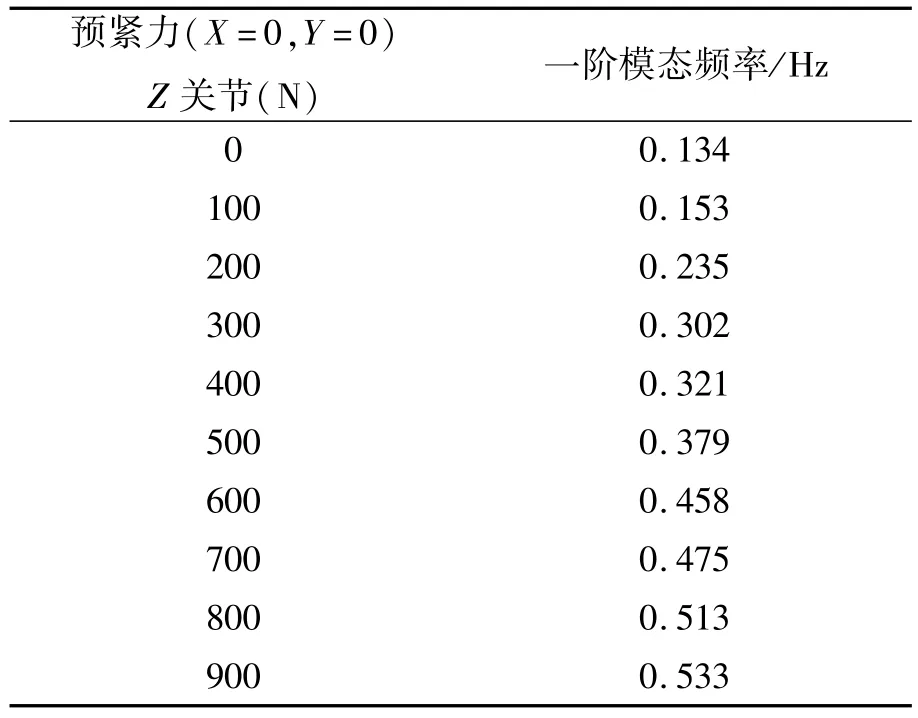
表2 系統一階模態頻率與Z關節軸承預緊力關系Tab.2 Relationship between preload of Z-joint bearing and first modal frequency of system
(3)Y關節軸承預緊力對系統基頻的影響分析
對Y關節角接觸球軸承施加預緊力,Z、Y關節角接觸球軸承不施加預緊力。此時,臂式補償機構與空間望遠鏡系統的一階模態頻率與Y關節的角接觸球軸承預緊力關系如表3所示。
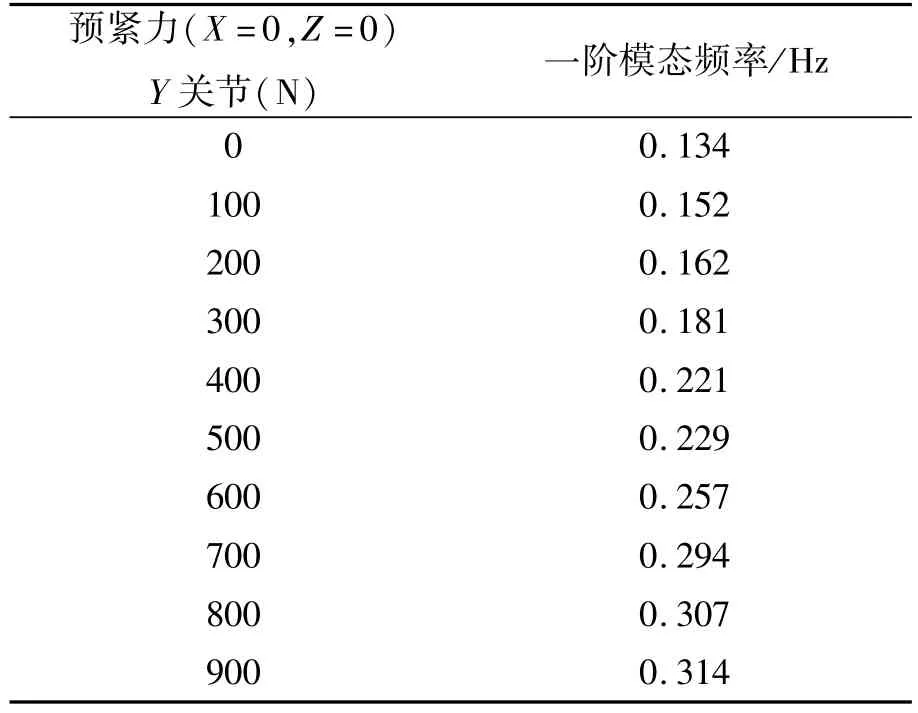
表3 系統一階模態頻率與Y關節軸承預緊力關系Tab.3 Relationship between preload of Y-joint bearing and first modal frequency of system
從以上分析結果中可以得出,X關節的角接觸球軸承預緊力對臂式補償機構與空間望遠鏡系統的一階模態頻率影響最大,Y關節的角接觸球軸承預緊力對系統的一階模態頻率影響最小。因此,為了提高臂式補償機構與空間望遠鏡系統的動態剛度,應首先確定X關節軸承的預緊力。
4.2 最佳預緊力的確定
臂式補償機構的最高補償角速度為0.5°/s,不考慮軸承溫升的影響,所以確定臂式補償機構關節軸承的預緊力時僅需考慮臂式補償機構與空間望遠鏡系統的動態剛度、關節啟動力矩、發射和回掃過程中的卸載力等因素的影響。
X關節軸承預緊力對系統動態剛度的貢獻最大,因此,系統的動態剛度應主要由X關節軸承預緊力進行保證。跟蹤和控制系統要求系統的一階模態頻率高于1 Hz,所以X關節的軸承預緊力初步確定為700 N,此時,如果Y關節軸承不預緊,系統動態剛度隨Z關節軸承預緊力的關節見表4所示。
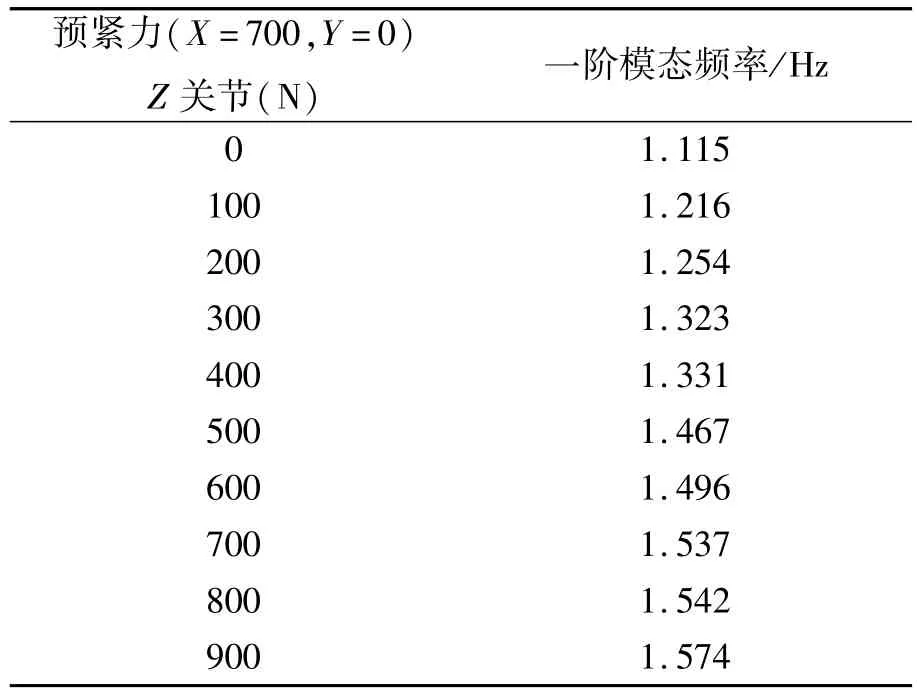
表4 系統一階模態頻率與Z關節軸承預緊力關系(X=700,Y=0)Tab.4 Relationship between preload of Z-joint bearing and first modal frequency of system(X=700,Y=0)
從表4可以看出,當Z關節軸承預緊力達到500 N時,臂式補償機構與空間望遠鏡系統的一階頻率有較大提高,所以,Z關節軸承預緊力初步確定為500 N,可以進一步提高系統動態剛度。
當X關節軸承預緊力為700 N,Z關節軸承預緊力為500 N時,系統的動態剛度隨Y關節軸承預緊力的關節見表5所示。
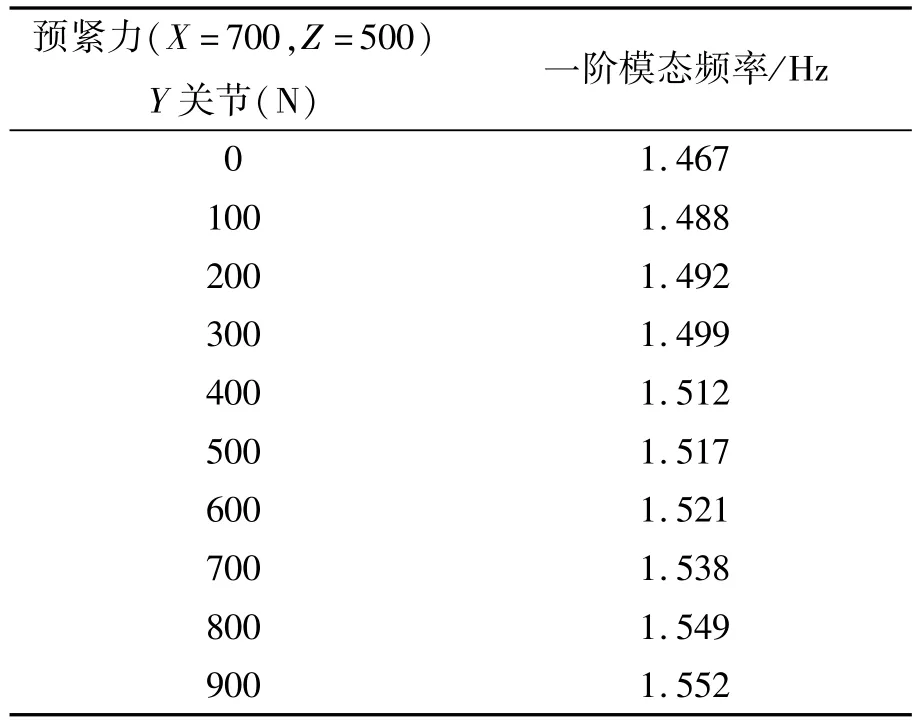
表5 系統一階模態頻率與Y關節軸承預緊力關系(X=700,Z=500)Tab.5 Relationship between preload of Y-joint bearing and first modal frequency of system(X=700,Z=500)
從表5中數據可以看出,Y關節軸承預緊力對系統動態剛度提高不大,因此,Y關節軸承預緊力可根據卸載力、啟動力矩等靈活確定,選Y關節軸承預緊力為600 N。
5 結論
由臂式補償機構控制空間望遠鏡的這種結構形式,會導致系統剛度很低。為了滿足控制系統提出的結構系統高剛度要求,在系統結構形式確定的情況下,分析通過施加軸承預緊力來提高系統固有頻率的可行性。通過理論分析及利用有限元分析的手段,對配對使用的角接觸球軸承施加合適的預緊力,可以提高軸承的剛度,進而提高支撐系統的剛度。基于該思路,本文主要分析了軸承預緊力和軸承剛度、關節軸系剛度的關系,推導出了軸承預緊力與關節軸系剛度的關系表達式,并通過有限元分析的手段獲得了軸承預緊力與系統固有頻率的關系。證明在系統結構形式確定的情況下,對軸承施加合適的預緊力可以提高系統的剛度,同時為確定軸承最佳預緊力提供了有效的方法。對于文中所示系統,當X關節預緊力為700 N,Z關節預緊力為500 N,Y關節預緊力為600 N時,系統的基頻在1.5 Hz以上,達到了預期目的。
[1]韓德一,梁波.慣性平臺軸承預緊力及其剛度的計算分析[J].中國慣性技術學報,1998,6(4):38-60.
HAN D Y,LIANG B.Analysis and computation on the preloaded force and stiffness of bearing fixed in the inertial platform[J].J.Chinese Inertial Technology,1998,6(4):38-60.(in Chinese)
[2]ZVERV I,PYOUN Y S,LEE K B,et al..An elastic deformation model of high speed spindles built into ball bearings[J].J.Materials Processing Technology,2005,170(3):570-578.
[3]ALASRY A,ABEDI H.Kinematic and dynamic sensitivity analysis of a three-axis rotary table[J].IEEE,2003 2:1147-1152.
[4]ALFARES M A,ELSHARKAWY A A.Effects of axial preloading of angular contact ball bearings on the dynamics of a grinding machine spindle system[J].J.Materials Processing Technology,2003,136(1-3):48-59.
[5]李朝輝,陳波.月基對地觀測跟蹤轉臺設計與分析[J].光子學報,2010,39(12):2215-2219.
LI ZH H,CHEN B.Development of lunar pointing mounts for imaging to the earth[J].Acta Photonica Sinica,2010,39 (12),2215-2219.(in Chinese)
[6]王智,李朝輝.月基極紫外相機光機結構設計[J].光學精密工程,2011,19(10):2427-2433.
WANG ZH,LI ZH H.Optical-mechanical structure design for lunar-based extreme ultraviolet camera[J].Opt.Precision Eng.,2011,19(10):2427-2433.(in Chinese)
[7]王智.基于碳纖維復合材料的月基極紫外相機照準架結構設計[J].中國光學,2012,5(6):590-595.
WANG ZH.Design of CRFP collimation frame structure of lunar-based EUV camera[J].Chinese Optics,2012,5(6):590-595.(in Chinese)
[8]張景旭.大型跟瞄架方位軸系的研制[J].光學精密工程,1996,4(2):73-77.
ZHANG J X.Development of vertical axial system for large tracking and pointing mount[J].Opt.Precision Eng.,1996,4(2):73-77.(in Chinese)
[9]田學光,田興志,劉軒,等.大型精密轉臺高精度角度微驅動裝置研制[J].光學精密工程,2010,18(5):1112-1118.
TIAN X G,TIAN X ZH,LIU X,et al.Development of angular micro driving device for large-scale and high accurate turntable[J].Opt.Precision Eng.,2010,18(5):1112-1118.(in Chinese)
[10]李為民,王海濤.軸向定位預緊軸承剛度計算[J].河北工業大學學報,2001,30(2):15-19.
LI W M,WANG H T.Rigidity calculation of axial position preload bearings[J].J.Hebei University of Technology,2001,30(2):15-19.(in Chinese)
[11]郭向東,王燕霜.軸承預緊力-系統固有頻率及跨距關系的研究[J].軸承,2013,4:30-33.
GUO X D,WANG Y SH.Research on relationship among bearing preload,system natural frequency and span[J].Bearing,2013,4:30-33.(in Chinese)
[12]SHAN X B,XIE T,CHEN W SH.Novel approach for determining the optimal axial preload of a simulating rotary table spindle system[J].J.Zhejiang University Science A,2007,8(5):812-817.
Analysis on the relationship between bearing preload of spatial arm compensation mechanism and system stiffness
WANG Zhi*,GUO Wan-cun
(Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China)
When the spatial telescope tracks the target on the orbit,move and rotation will occurr between the visual axis of the telescope and target(namely pointing deviation and oscillation)due to all kinds of factors in space.In order to compensate above errors,the arm compensation mechanism is designed to compensate the errors between the visual axis and the target.Because the size and weight of the arm compensation mechanism are restricted severely,and the size of the telescope is huge and its weight is more than 3 000 kg,this configuration results in lower stiffness of the system.In order to satisfy higher machinery stiffness required by the control system,the feasibility is analyzed to improve system stiffness through forcing preload on bearing after the system configuration is confirmed.This paper studies on the relationship among bearing preload,bearing stiffness and system stiffness,and the relationship curve between bearing preload and system natural frequency is obtained.The analysis proves that forcing an appropriate preload to bearing can improve system stiffness on the condition that the system configuration is confirmed,and it is also an effective method to confirm the optimumbearing preload.
arm compensation mechanism;bearing;preload;stiffness
TH133.3
A
10.3788/CO.20140706.0989
2095-1531(2014)06-0989-07
王 智(1978—),男,山東壽光人,博士,副研究員,2000年于長春光學精密機械學院獲得學士學位,2003年于長春理工大學獲得碩士學位,2006年于中國科學院長春光學精密機械與物理研究所獲得博士學位,主要從事航天光學遙感器的光機結構設計、空間機器人結構設計等方面的研究。E-mail:wz070611@126.com
郭萬存(1985—),男,湖北隨州人,碩士,助理研究員,2008年于中國地質大學獲得學士學位,2011年于中國科學院長春光學精密機械與物理研究所獲得碩士學位,主要從事航天光學遙感器的結構設計及優化、力學分析及力學試驗等方面的研究。E-mail:guo333806@163.com
2014-09-18;
2014-11-17
國家自然科學基金資助項目(No.61108066)
*Corresponding author,E-mail:wz070611@126.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32