噴泵推進(jìn)穿浪式雙體船適航性改進(jìn)探討
2014-04-29 00:44:03楊志強(qiáng)
廣東造船 2014年6期
楊志強(qiáng)
摘 要:本文對目前使用的噴泵推進(jìn)穿浪式雙體船(SPWPC)的適航性進(jìn)行研究探討。根據(jù)(SPWPC)在航行過程中存在的一些適航性方面的問題參考目前在這一領(lǐng)域的研究成果進(jìn)行分析,并研究探討加裝一種減搖穿浪板裝置,以改進(jìn)其適航性能。
關(guān)鍵詞:噴泵推進(jìn)器(SP);穿浪式雙體船(WPC);縱向穩(wěn)定性;減搖穿浪板
中圖分類號:661.32 文獻(xiàn)標(biāo)識碼:A
1 前言
噴泵推進(jìn)穿浪式雙體船(簡稱SPWPC)是近十幾年發(fā)展起來的一種高速船,目前這種船已開始向大型化發(fā)展,應(yīng)用于短程客運(yùn)和軍事用途。但由于這種船的快速性與適航性對船型的技術(shù)要求存在矛盾,而且不能在高、低速時同時具有良好的適航性能,所以這已成為這種高性能船舶設(shè)計的一大難題。
2 SPWPC的適航性理論分析
2.1 SPWPC的穩(wěn)性影響
SPWPC的主、輔機(jī)等船舶機(jī)械、燃油艙、水艙都置于兩個浮體之中,4臺噴泵也設(shè)置于水線位置,因此其重心較低,在空載時就像個不倒翁似的浮在海面,即使是滿載時,初穩(wěn)性高度也很高,因此在航行時如遇浪涌,當(dāng)浪涌波長接近船長、波幅大于或等于浮體高度時搖蕩就十分激烈,使SPWPC的適航性能較差。
2.2 SPWPC的波浪阻尼影響
SPWPC的滿載水線在兩個浮體的上端,且浮體與連接橋平臺連接有浮力儲備過渡,因此不管在空載或滿載時其水線面積都較大,產(chǎn)生較大的興波阻力,當(dāng)遇到浪涌時受到的干擾力矩就較大,且兩個浮體前端是箭狀流線,對搖蕩的阻尼力很小。因此船的縱向搖蕩和垂蕩就較大。
2.3 SPWPC的尾端影響,
SPWPC的4臺噴泵裝置伸出尾封板向外噴水柱,它們確實(shí)起到了減少縱搖蕩的作用,但是它們高速噴出的水柱產(chǎn)生的推力,對于相對阻尼力矩較小的船首前端雙浮體來說,就象軟管一樣產(chǎn)生了激勵搖蕩作用,使噴水軟管來回擺動。
從以上的分析可知,SPWPC的缺點(diǎn)就是船首對縱向搖蕩的阻尼太小,興波阻力又較大,因此浪涌對它產(chǎn)生的干擾力矩就很大,遇浪涌時縱向激烈搖蕩,在緊急停船時首傾嚴(yán)重。
3 SPWPC的性能特點(diǎn)
3.1 SPWPC的優(yōu)點(diǎn)
(1)船體結(jié)構(gòu)方面
船體采用全鋁合金材料,重量輕,船體采用小水線面雙浮體結(jié)構(gòu),增加了船的平臺使用面積,減少了航行的興波阻力,有利于船的快速性和適航性。但是SPWPC的結(jié)構(gòu)與通常概念上的小水線面船(SWATH)又是不同的,它的水線在兩個浮體的上部而不是整個浮體潛入水中,平臺連接橋與兩個浮體的連接有一定的浮體面積過渡,這樣有利于在各種裝載情況變化時不會產(chǎn)生吃水線的突變。
(2)推進(jìn)裝置方面
SPWPC采用4臺流導(dǎo)式噴泵噴水推進(jìn),大大提高了船的操縱性能,可實(shí)現(xiàn)橫向移動、低速舵效、原地回轉(zhuǎn)、緊急停船和無離合器倒退等,還具有靜音性能、推進(jìn)效率高等優(yōu)點(diǎn),遠(yuǎn)優(yōu)于螺旋槳推進(jìn)。
3.2 SPWPC的缺點(diǎn)
雖然SPWPC具有以上多種優(yōu)越性,但也存在著一些缺陷,如果用于高級客船、測量船等對適航性要求高的情況,還有許多需要改進(jìn)的地方:
(1)SPWPC的海況適應(yīng)性
由于SPWPC的長寬比較小,在遇到較大的浪涌時,縱搖和垂蕩都比較大,影響了它的平穩(wěn)航行和舒適性。
(2)SPWPC的安全性
SPWPC在遇到緊急情況下,停船倒退時,由于噴泵的反向噴射產(chǎn)生一個力矩使船身急速地向前傾斜較大角度,高速時可能導(dǎo)致翻轉(zhuǎn),使其安全性大大降低。
(3)SPWPC的推進(jìn)效率
SPWPC在空載或壓載不均勻的狀態(tài)下航行時都不是其最佳狀態(tài),因為只有在滿載時當(dāng)船首兩個浮體完全潛入水中時船的水線面積才最小,這時的興波阻力最小;而當(dāng)船尾的4個噴泵都全在水線以下噴射水柱時,這時推進(jìn)效率才最高。也就是說,SPWPC無法在不同的裝載情況下航行均能實(shí)現(xiàn)最佳效率。
4 改善SPWPC適航性能的研究現(xiàn)狀
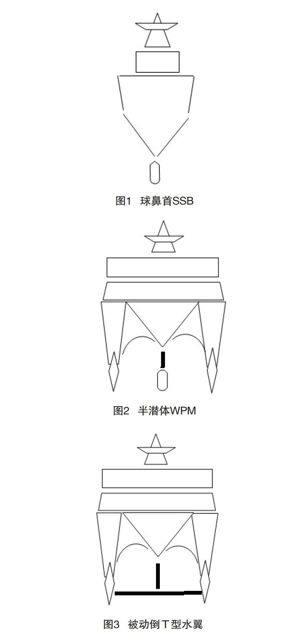
(1)在單體深V型船體下加裝類似球鼻首的半潛體(圖1),安裝后對減少阻力和改善適航性能都有良好的效果;
(2)在船中央船體龍骨下方安裝一個半潛體被動鰭(WPM),形成穿浪多體船(圖2)。這樣對改善穿浪雙體船的阻力與適航性能有明顯的效果,在諧振區(qū)附近和較高的波浪頻率范圍的對減少縱搖和升沉有較好的效果,哈爾濱工程大學(xué)的研究證實(shí)了這一設(shè)想的正確性和可行性;
(3)澳大利亞的Incat高速船公司采用倒T型水翼代替中央船體上的WPM進(jìn)行減搖,經(jīng)哈爾濱工程大學(xué)的試驗證明,倒T形水翼在更大的波浪頻率范圍內(nèi)對減小縱搖、升沉和首尾加速度都有很好的效果。
(4)美國Havatek公司Tadd復(fù)合增升體船,就是在首尾加組合固定水翼來提高適航性能。
圖1 球鼻首SSB
圖2 半潛體WPM
圖3 被動倒T型水翼
5 設(shè)置主動減搖穿浪板裝置的探討
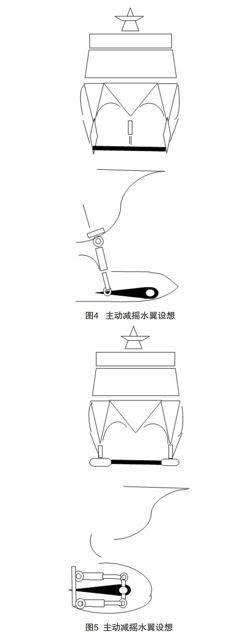
(1)綜合現(xiàn)有的各項研究成果,如上述Incat高速船公司的倒T型被動式減搖水翼外,可以探討對噴泵推進(jìn)穿浪雙體船進(jìn)行創(chuàng)新改良,設(shè)置主動減搖水翼裝置,如圖4所示。
(2)設(shè)計一種新的船型,將兩個船首設(shè)計為扁寬下潛球鼻首,球鼻首之間安裝主動式一字減搖水翼,如圖5所示。這樣就能大大的改善SPWPC的適航性能。
圖4 主動減搖水翼設(shè)想
圖5 主動減搖水翼設(shè)想
6 主動減搖穿浪板裝置的方案
6.1 對現(xiàn)有的SPWPC進(jìn)行改良
見圖4 。
(1)在船的兩個浮體前端水線下設(shè)置一個流線型水翼,水翼之兩端軸與兩浮體內(nèi)側(cè)設(shè)置水密封軸承相接;
(2)船首舯底部安裝液壓桿,伸出的液壓桿活動桿端與水翼中部往后一定距離安裝的絞鏈相接;
(3)液壓桿設(shè)置液壓糸統(tǒng)、波浪縱搖感應(yīng)器及電路控制糸統(tǒng),自動控制液壓桿的伸縮,控制水翼升降角度;
(4)工作原理:在船遇到浪涌時航行,水翼本身起到波浪搖擺阻尼的作用,波浪縱搖感應(yīng)器感應(yīng)縱擺的信息,傳給電路控制自動控制液壓桿的伸縮,控制水翼升降角度,產(chǎn)生升降的力矩來抵消船搖晃的力矩,從而使船在浪涌中平穩(wěn)地航行。
6.2 對新造的SPWPC船設(shè)計設(shè)想
見圖5 。
(1)把兩船體首流水線下端設(shè)計成寬扁流線型下潛球鼻首的兩個浮體;
(2)兩個浮體之間設(shè)置一個流線型水翼,水翼之兩端軸與兩浮體潛球鼻首內(nèi)側(cè)設(shè)置水密封軸承相接;
(3)在兩個下潛球鼻首浮體內(nèi)都安裝有液壓桿、液壓控制電路、波浪縱搖感應(yīng)器及電路控制糸統(tǒng),自動控制液壓桿的伸縮,控制水翼升降角度;
(4)工作原理:在船遇到浪涌時航行,設(shè)計的兩個下潛球鼻首(無論空、滿載都處于水線下)和水翼都能起到波浪搖擺阻尼的作用,在兩個下潛球鼻首內(nèi)都設(shè)置液壓控制系統(tǒng),液壓桿伸縮連接水翼的力臂使水翼與水平面升降角度,產(chǎn)生升降的力矩來抵消船搖晃的力矩,從而使船在浪涌中平穩(wěn)地航行。這種裝置與現(xiàn)有的船舶橫向減搖鰭原理相似,有現(xiàn)成的舵操縱機(jī)構(gòu)可借鑒。
7 新設(shè)計SPWPC對適航性能的改進(jìn)
(1)在正常(風(fēng)平浪靜)航行狀態(tài)下,無論船的裝載情況如何,穿浪板在液壓桿的伸縮調(diào)整水翼與水平成一個角度,從而產(chǎn)生一個升力矩或降力矩,可以調(diào)整船的姿態(tài)使之在最佳縱傾下航行;
(2)在緊急停船時,液壓桿立即伸出使穿浪板與水平成一個升力矩和阻力最大的角度,升力矩與噴泵反向噴水產(chǎn)生的力矩方向相反大小相等相互抵消,使船不會產(chǎn)生首傾而處于平穩(wěn)狀態(tài);
(3)當(dāng)船在較大浪涌中航行時,因整個穿浪板在水線以下,增加了水下面積,從而增加了對船縱向搖蕩的阻尼力矩,大大減輕了縱向搖蕩。且設(shè)置了縱向搖蕩感應(yīng)器,將搖晃的信息傳送給控制電路,再控制液壓分配模塊使液壓桿伸縮,在穿浪板上形成升降力矩來抵消浪涌導(dǎo)致的縱向搖蕩力矩,使船在大浪涌中平穩(wěn)航行。
8 結(jié)論
設(shè)置了主動減搖穿浪板后,使SPWPC的適航性能大大提高,雖然增加了一些阻力,但可調(diào)整的航行狀態(tài),降低了興波阻力,因此對船舶的速度影響很小。主動減搖穿浪板的設(shè)置使SPWPC適合于在大浪涌的海域高速平穩(wěn)地航行,成為人們追求的一種“全天候”愿望,這對于大型軍力遠(yuǎn)距離投送和高級民用客運(yùn)的安全性、舒適性、經(jīng)濟(jì)性都有重大的意義。
參考文獻(xiàn)
《高性能船舶原理與設(shè)計》趙連恩,謝永和編著.國防工業(yè)出版社.