自抗擾控制技術在電動舵系統中的應用
2014-04-19 11:21:00熊官送那學智曹東海
導航定位與授時 2014年3期
熊官送,那學智,曹東海
(北京自動化控制設備研究所,北京100074)
自抗擾控制技術在電動舵系統中的應用
熊官送,那學智,曹東海
(北京自動化控制設備研究所,北京100074)
摘要:針對無刷直流電機驅動的位置伺服系統,介紹了其自抗擾控制器設計的基本思路與實現過程。通過擴張狀態觀測器的動態補償提高了電動舵機的魯棒性,同時對系統閉環特性進行了分析,并對結果進行了仿真計算與實驗研究,最后給出了自抗擾控制技術在快速響應電動舵機中的應用結果。
關鍵詞:自抗擾控制器;無刷直流電機;舵機
0 引言
導彈精確制導技術的發展,特別是超音速導彈對舵機性能要求越來越高,如舵機應具有較大的功率輸出能力、良好的低速跟蹤性能、大負載下較小的跟蹤誤差等。傳統電動伺服系統的控制回路從物理可實現的角度,基本上都是采用最經典的PID控制,使得控制性能的提升受到了一定限制。雖然目前已經有許多研究者從事現代先進控制算法應用于數字伺服系統的嘗試,但是成功工程應用還是十分少見。造成這種現象的原因一方面是算法過于復雜,在控制器上難以實現,造成了控制算法的實用性不強。另一方面,數字伺服系統中存在著比較明顯的死區、間隙、摩擦、飽和等非線性特性,使得其成為許多先進控制算法應用中的一個瓶頸因素。
自抗擾控制(Active Disturbances Rejection Control,ADRC)技術,是發揚PID控制技術的精髓并吸取現代控制理論成就,是從計算機仿真試驗結果的歸納和綜合中探索出來的,是不依賴于被控對象精確模型的、能夠替代PID控制技術的新型實用數字控制技術[1]。自抗擾控制器主要由微分跟蹤器、擴張狀態觀測器、非線性組合、擾動補償等四個部分組合而成。其核心是擾動估計與動態補償[2-4]。
本文針對舵系統中的擾動因素,特別是負載力矩,在建立舵機數學模型的基礎上,設計了自抗擾控制器,提出了針對舵機控制對象特定問題的有效解決方案,并對引入ESO補償后系統的回路特性進行了分析。實驗結果表明,自抗擾控制器在不影響舵機響應速度的同時,具有提高伺服剛度、減小靜差、增強抗負載擾動能力等優勢。
1 舵機的數學模型
電動舵機一般由稀土永磁無刷直流電動機、傳動機構和位置反饋傳感器等組成。圖1為目前廣泛應用的電動舵機原理框圖,將摩擦及外界負載擾動等效為擾動力矩Tl,傳動機構簡化為減速比i,忽略死區、間隙等非線性因素,其簡化的運動方程見式(1):
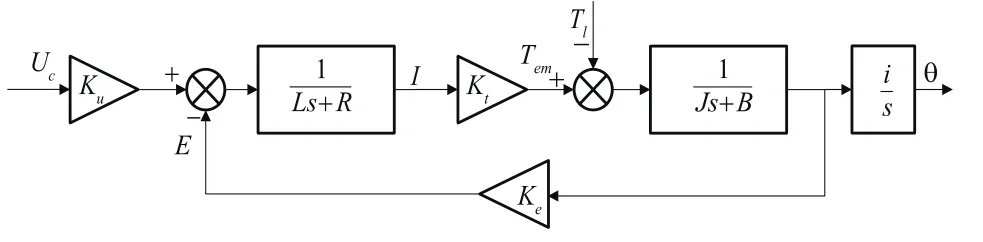
圖1 舵機的結構框圖Fig.1 Architecture of electromechanical actuation
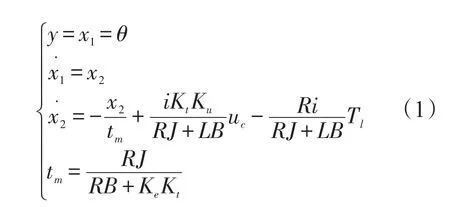
式中,θ為舵偏角,Uc為控制量,Ku為功率放大增益,i為傳動減速比,R、L、Kt、Ke、B、J和tm分別為電機的電阻、電感、轉矩系數、反電勢系數、阻尼系數、等效轉動慣量和機電時間常數。
2 控制器設計及分析
2.1舵機的LADRC控制器設計
ADRC的重要思想為采用狀態觀測器的方法對未知量進行觀測和估計,并用于狀態反饋和補償,由式(1)可以看出,舵機模型涉及參數較多,且多數參數都是較小量值,在實際中很難精確測量,并且負載擾動Tl是未知量,通過設計合理的擴張狀態觀測器可以補償未知擾動和未建模動態的影響。

從式(2)中可以看出,模型只與未知總擾動x3有關,令=w,得到狀態方程:
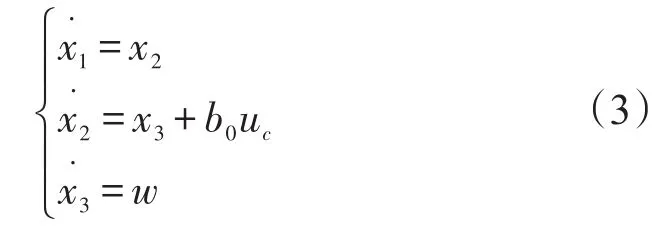
可以將觀測器設計為下面的形式[2]:

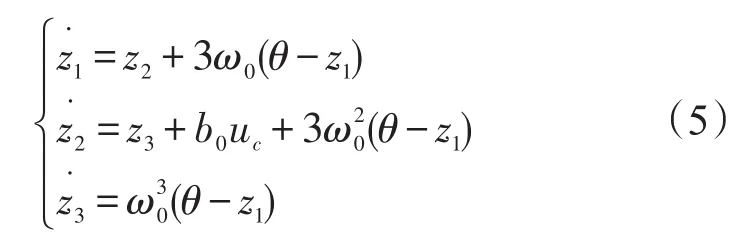
只要帶寬ωo足夠高,就可以將估計出的狀態x3近似為z3,因此對于舵機模型式(2)可以等效為串行積分型,設計PD控制器為:
式中r為期望舵偏角,θ為實際舵偏角。由于對舵機的擾動進行了精確補償,簡單傳統的PD控制就能滿足要求,不考慮觀測器的動態特性,則系統閉環傳函為:

對于式(7)我們就可以方便地根據頻域和時域指標去分析設計,通過使用線性ESO補償可以避免使用積分補償而導致的動態品質變差的缺陷。通過調整觀測器的帶寬,就可以對系統為建模動態和負載擾動進行估計,并進行動態補償,因此可以實現高精度的控制。
2.2回路分析
自抗擾控制之所以具有很強的魯棒性是由于建立在動態擾動實時估計并進行動態補償的基礎上,并且忽略了其觀測誤差。然而在實際應用中,擾動觀測器帶寬是受限制的,因此,需對有限帶寬的自抗擾控制器進行閉環特性分析。由式(5)可得到式(8)。
代入式(6)得:

由式(9)可見,自抗擾控制器可等效為:在PD控制的基礎上,增加了一項加速度濾波負反饋項和一個控制量濾波正反饋項,前三項與傳統伺服系統采用的三回路位置、速度和電流控制基本相同,其等效回路框圖見圖2所示。圖3為工程中常用的擾動觀測補償控制框圖,通過對比圖2與圖3,不難發現其控制原理完全相同,線性ESO中的為被控對象的近似逆模型,而ω0同樣為濾波器的帶寬。但與擾動觀測器不同的是,ESO(式(5))是通過積分形式實現了擾動觀測和濾波,因此相對圖3中的微分解算環節,ESO更適用于工程應用。
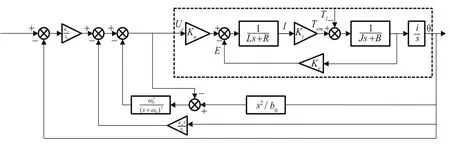
圖2 自抗擾控制閉環等效回路Fig.2 The equivalent loop ofADRC

圖3 擾動觀測器補償回路原理框圖Fig.3 The scheme of disturbance observer
由于自抗擾控制器引入了擾動反饋回路,需要分析其對系統穩定性的影響。圖4為某電動舵系統分別采用PD控制和自抗擾控制的系統開環Bode圖,從圖中可以看出,自抗擾控制器通過擾動觀測補償回路,將系統從原先的Ι型校正為ΙΙ型,同時增大了系統開環增益,且對高頻段系統特性無影響,因此無積分器也可以實現對擾動的無靜差控制,同時擴展了系統帶寬(如圖5)。但隨著觀測器帶寬ω0的增大,系統的相角裕度隨之下降,因此擴張觀測器ω0的帶寬不宜選擇過高。
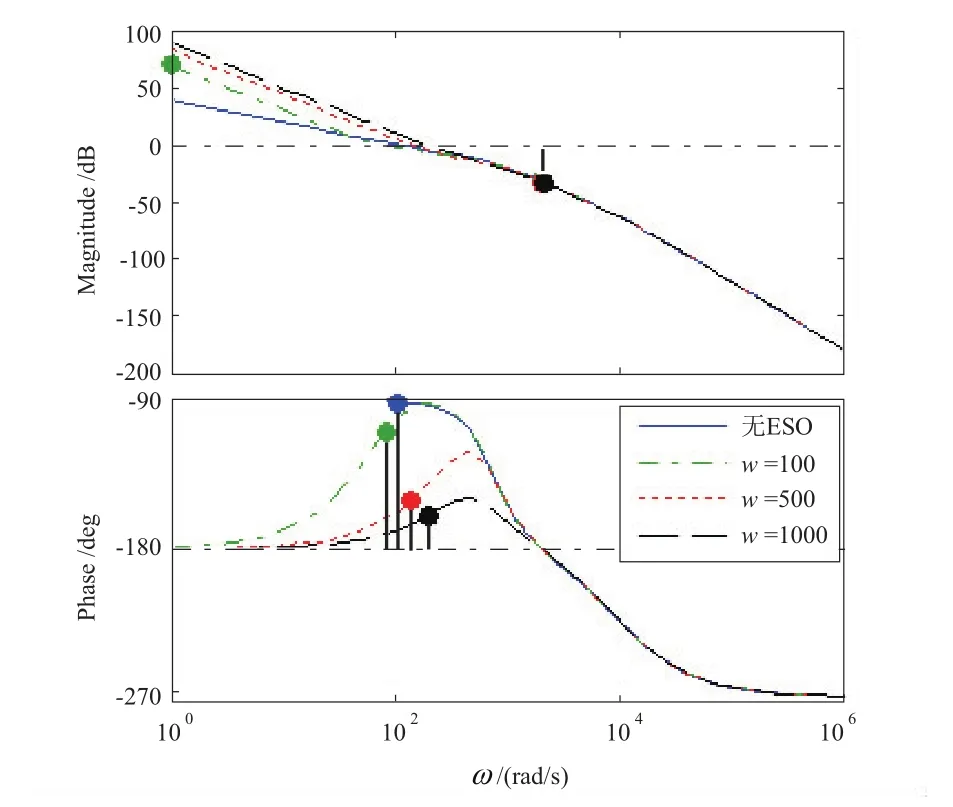
圖4 開環Bode圖Fig.4 Bode of open loop
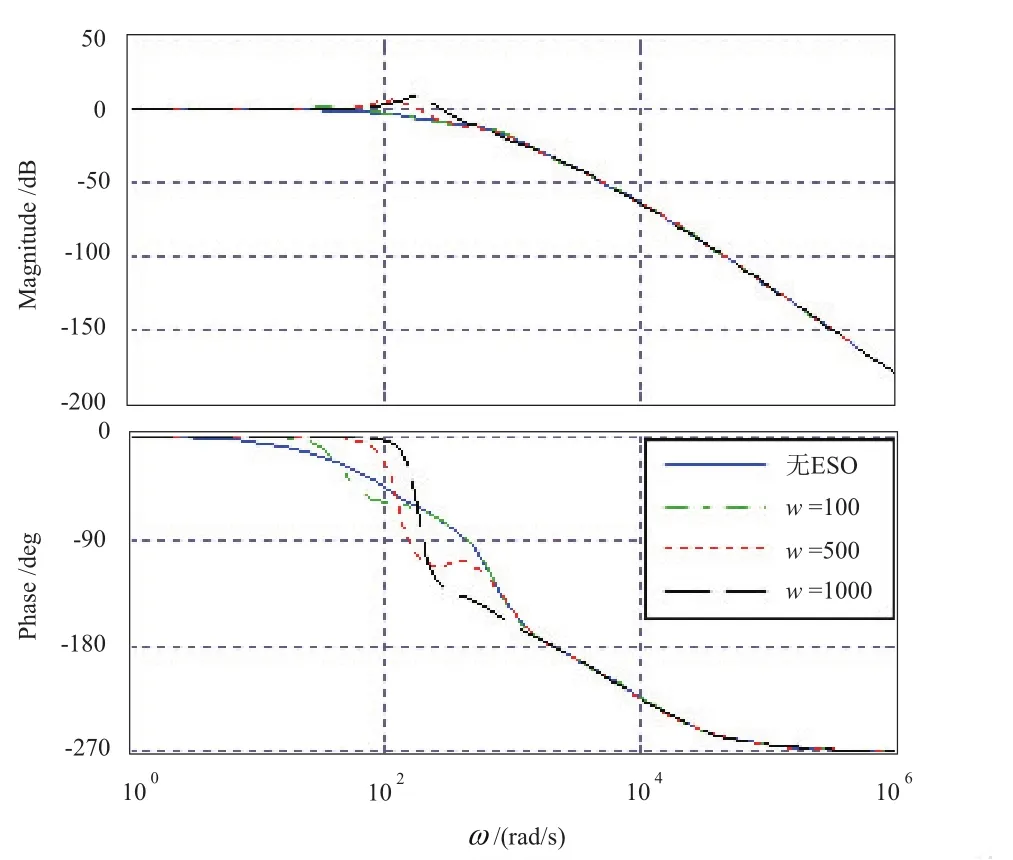
圖5 系統閉環頻率響應Fig.5 Closed loop frequency response
3 仿真及實驗
3.1仿真驗證
通過設計(式(8))的控制律,在matlab下對系統進行了仿真,控制器主要參數為:kp=0.8,kd=0.035,b0=42330,w0=200,為了充分考慮系統抗負載擾動的能力,分別采用恒值負載力矩以及正弦負載力矩作用下,驗證系統抗擾動能力,結果如圖6及圖7(力矩值為等效到電機軸上的力矩大小)。仿真結果說明,對于電動舵機在帶載情況下,采用PD控制會帶來較大靜差,而采用ESO觀測補償擾動和PD控制的方法卻能實現高精度控制,避免積分帶來的遲滯、極限環等不利因素,是工程中理想的選擇方案。
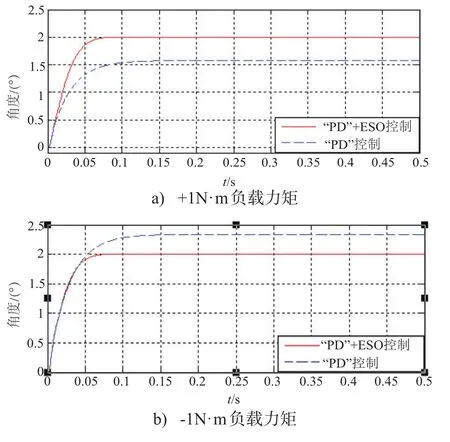
圖6 恒值負載力矩下階躍響應曲線Fig.6 Step response with±1N.m load
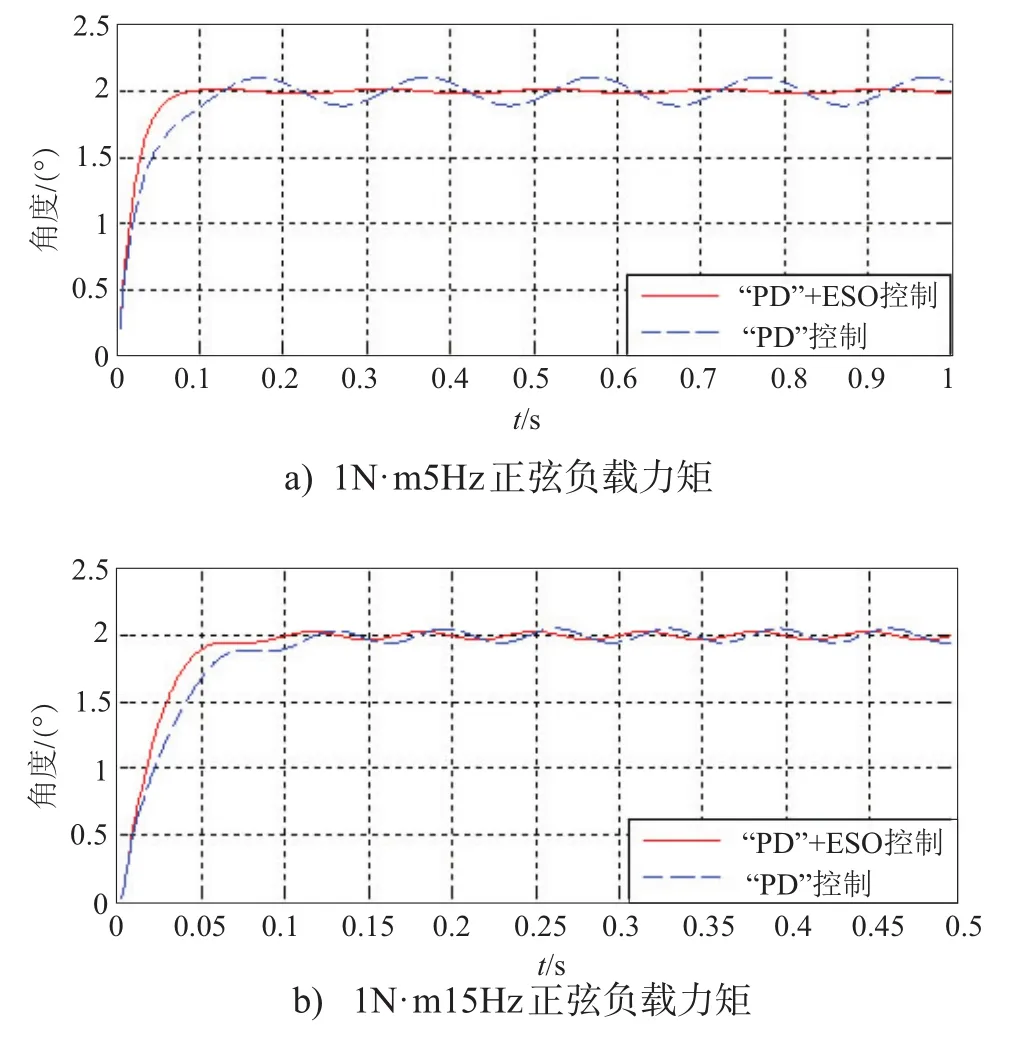
圖7 正弦負載力矩下階躍響應曲線Fig.7 Step response with sine load
從仿真結果可以看出,采用ESO補償的自抗擾系統對常值及低頻負載擾動有著很好的抑制作用,顯著提高了系統的控制精度。但隨著擾動頻率的增加,抑制能力會越來越弱,這是由于受觀測器的帶寬所限,帶寬越高對擾動的估計越精確,但同時對噪聲也會越敏感,影響系統的穩定性。因此需要綜合考慮噪聲和擾動頻率選擇合理的觀測器帶寬。在一般情況下,通常將觀測器帶寬選擇為系統閉環帶寬3~5倍[5]。
3.2實驗驗證
將自抗擾技術應用于某型數字化無刷直流電動舵系統中,控制算法由數字控制器實現。在10N·m/(°)的彈性負載下進行測試驗證,角度1V對應2°,舵機實測數據如下:
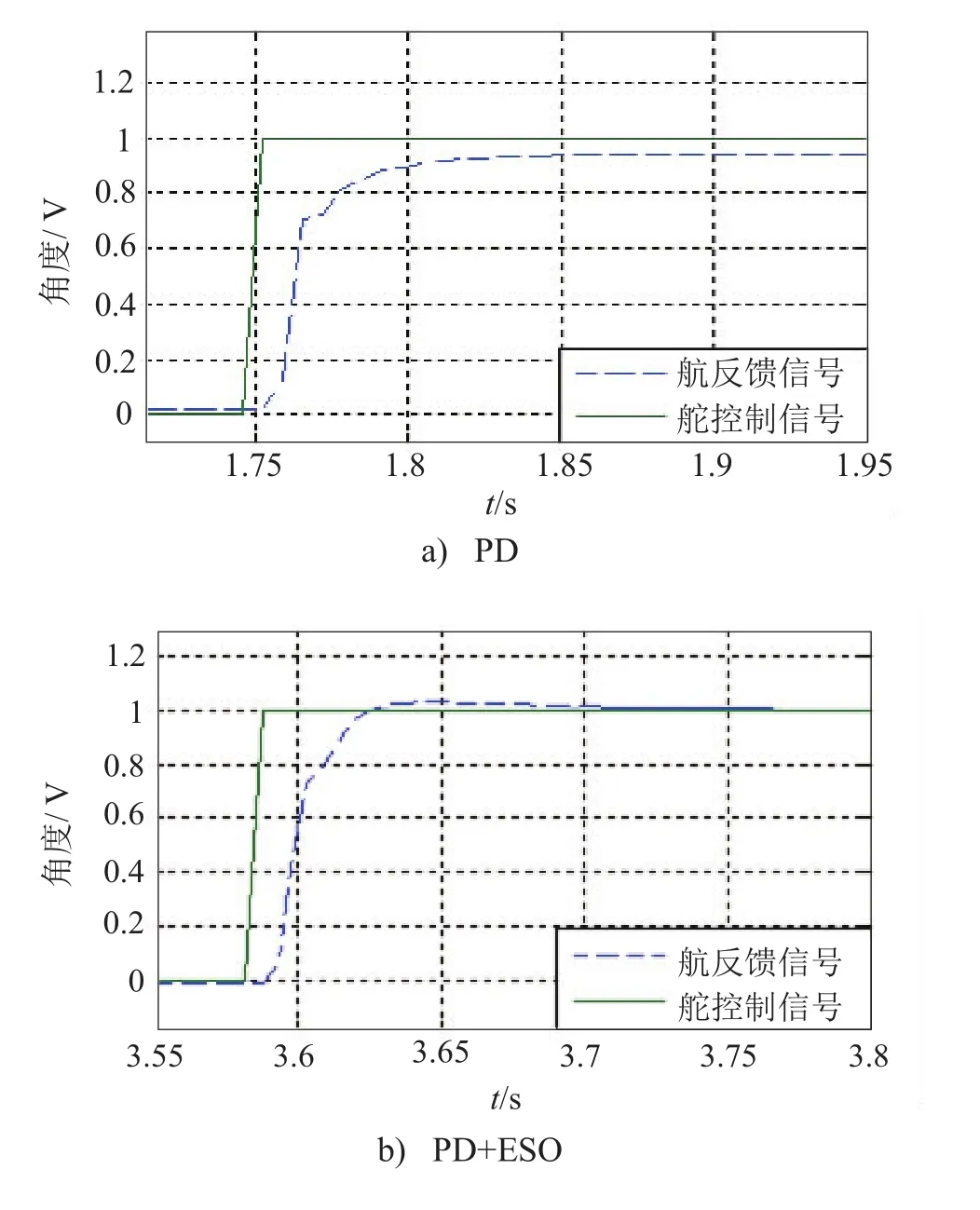
圖8 階躍信號響應曲線Fig.8 Loaded step response
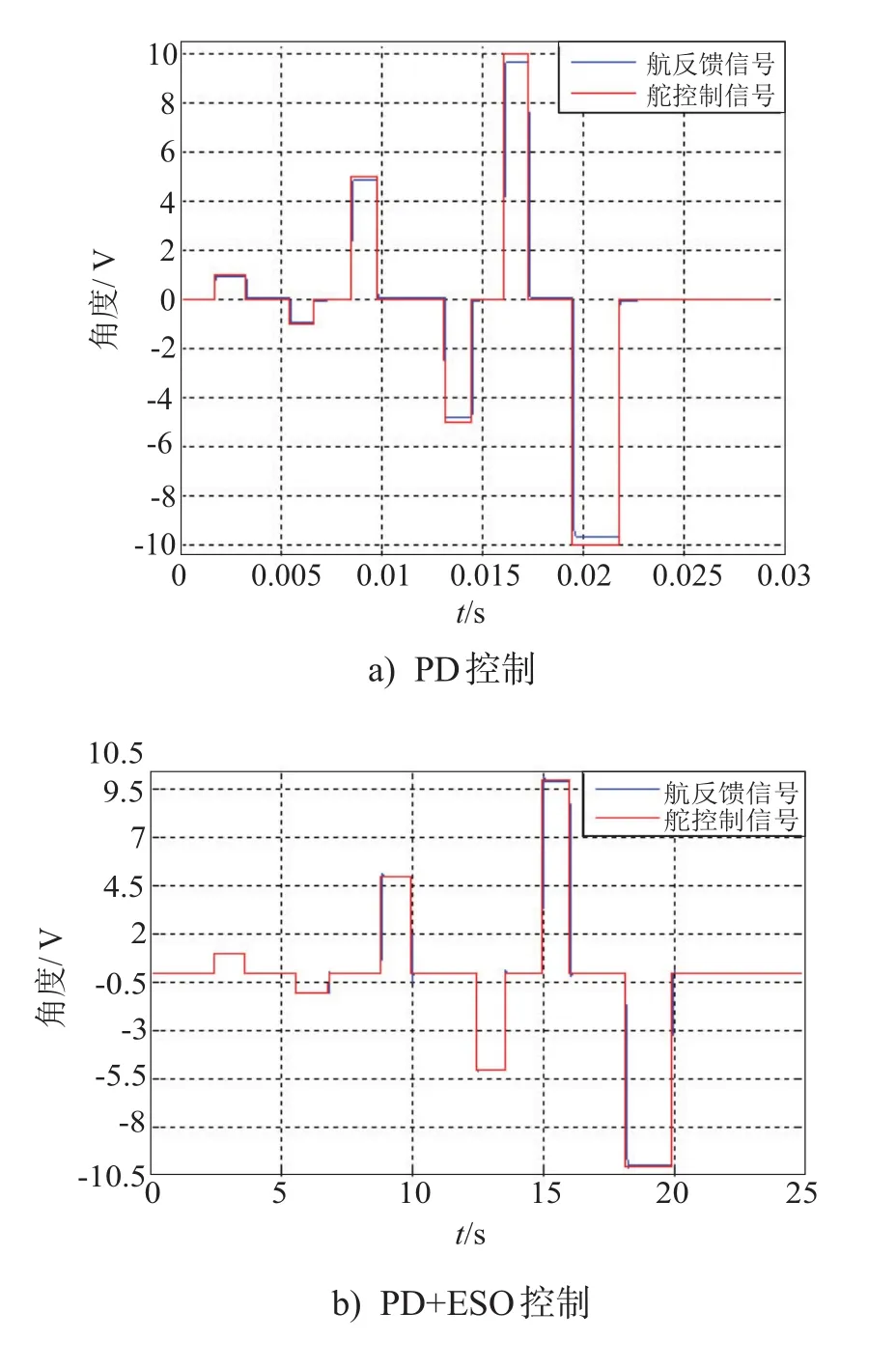
圖9 不同力矩負載下的響應曲線Fig.9 Step response with 10 N·m/deg load
采用PD控制時,系統階躍響應調節時間為60ms,靜差58mV,而采用ESO補償后,調節時間為50ms,靜差8mV;在10N·m/(°)的彈性負載下,采用PD控制時最大靜差為400mV(0.8°),而引入ESO補償后,系統靜差減小到50mV(0.1°),如圖9所示。測試結果表明,改進后的系統動態性能得到提高,解決了在大負載力矩下控制精度低的問題,取得了理想的控制效果。
4 結論
本文通過設計擴張狀態觀測器估計舵機的內外擾動,解決了傳統的電動伺服系統抗負載擾動能力差的問題。與已有研究相比,本文對系統閉環特性進行了分析,發現電動伺服系統采用擴張狀態觀測器其基本原理與擾動觀測器相同,前者通過積分形式估計擾動,在工程上應用性更強。通過仿真及實驗驗證,自抗擾控制技術可以提高數字電動伺服系統的控制精度和抗負載擾動的能力,相比PID控制具有更強的魯棒性和更好的控制品質。
參考文獻
[1]韓京清.自抗擾控制技術-估計補償不確定因素的控制技術[M].北京:國防工業出版社,2008.
[2]高志強.自抗擾控制思想探究[J].控制理論與應用,2013.
[3]黃煥袍,萬暉,韓京清.安排過渡過程是提高閉環系統“魯棒性、適應性和穩定性”的一種有效方法[J].控制理論與應用,2001.
[4]孫明瑋,焦綱領,楊瑞光,陳增強.自抗擾控制在飛行器控制與制導上的應用與分析-不同時間尺度問題的摸索[C].第29屆中國控制會議.北京,中國,2010:6167-6172.
[5]Zhiqiang Gao.Art vs.Science in Control System Design [D].USA:Cleveland State University,2009.
中圖分類號:TP273
文獻標志碼:A
文章編號:2095-8110(2014)03-0042-05
收稿日期:2013–03–18;
修訂日期:2014–06–27。
作者簡介:熊官送(1985–),男,工程師,主要從事伺服控制方面的研究。E-mail:xgs_ht0033@163.com
TheApplication of ADRC in ElectromechanicalActuation System
XIONG Guan-song,NAXue-zhi,CAO Dong-hai
(Beijing Institute ofAutomatic Control Equipment,Beijing 100074,China)
Abstract:Basic ideas of ADRC controller design process is introduced on the position servo system for brushless DC motor drivers.The electric servos robustness is improved by dynamic compensation of ESO,then the closed-loop system characteristics is analyzed,and the result is simulated and experimentally studied.Finally ADRC control technology in the rapid response to the application of the results of the electromechanical actuation is showed.
Key words:ADRC controller;BLDC;Electromechanical actuation
