船載衛通站校相的研究與探討
2014-04-03 01:48:36葉圣昊
江蘇科技信息 2014年4期
關鍵詞:信號
林 野,葉圣昊
(中國衛星海上測控部,江蘇江陰 214431)
0 引言
在船載衛通站中,當跟蹤線極化星進行通信時,隨著船舶地理位置的變化,天線跟蹤衛星的線極化角也會發生相應的變化。為了更好地接收衛星信號,當極化角發射變化時,天線就要通過調整天線極化面來適應極化角的變化,這樣便引起跟蹤接收機的相位發生漂移,即對天線的跟蹤性能產生一定的影響。為了使天線在地理位置發生變化之后依然具有很好的跟蹤性能,就需要根據地理位置的變化不斷地調整跟蹤接收機相位,本文針對相位的變化原因以及調整的方式做了簡單討論,僅僅作為以往工作的一種經驗總結。
1 極化的概念
所謂極化,就是電磁波在空間任一固定點上波的電場矢量空間取向隨時間變化的方式,包含線極化和圓極化。線極化波的電場矢量空間取向不變,矢量軌跡隨時間變化為一條直線,為了實現極化復用,又可以將線極化進一步分為水平極化和垂直極化。天線的極化由其輻射的電磁波的極化來確定。衛通站的水平極化方向定義為:垂直于電波的傳播方向,并且平行于衛通站的地平面;而其垂直極化方向的定義為:垂直于電波的傳播方向,并且與電波傳播方向和衛通站當地的鉛垂線所構成的平面平行。綜合以上說明,衛通站天線的水平極化、垂直極化方向分別與饋源矩形波導口的窄邊和寬邊平行。當衛通站天線對準衛星時,衛星發射信號的水平極化方向和衛通站的水平極化方向之間的夾角稱為線極化角。假設地球同步軌道衛星位于東徑α赤道上空,衛通站的地理位置為東徑β,北緯φ(南緯時取負),相應的極化角P經公式推導為:
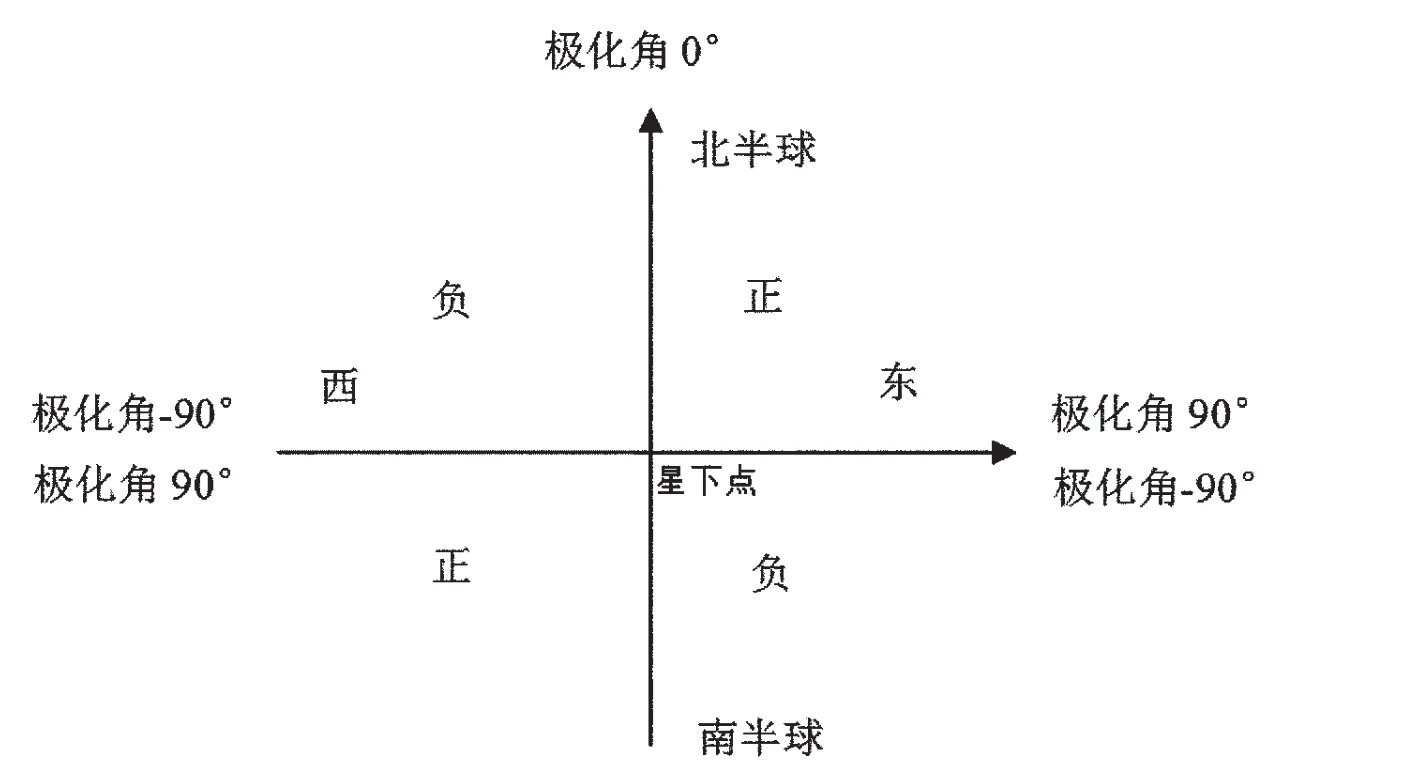
圖1 極化角的極性

根據式(1),在衛星覆蓋范圍內,以星下點為原點,以赤道為x軸,過星下點的子午線為y軸,可將地球分為4個象限。極化角在1,3象限內為正;2,4象限內為負。在y軸上極化角處為0°,在星下點東方從北半球靠近赤道時極化角為+90°,從南半球靠近時赤道為-90°;在星下點西方從北半球靠近赤道時極化角為-90°,從南半球靠近赤道時極化角為+90°,極化角的極性如圖1所示。
2 極化引起相位漂移
目前船載衛通站天線伺服跟蹤系統采用的是以TE21模為差模、以TE11模為和模的單通道單脈沖自跟蹤方式。當天線完全對準衛星方向時,接收的電磁波在多模饋源中激發的電場只有主模(和信號),而當天線偏離衛星方向時,電場將出現軸向分量,除主模外還產生高次模,取其中的一種高次模TE21模作為差信號用于跟蹤。跟蹤接收機的校相就是指在誤差解調時,通過調整鑒相器相位以消除通信和信號和跟蹤差信號的初始相位差,使交叉耦合滿足天線的跟蹤要求。根據式(1)和圖1可以知道,當船舶的地理位置發生變化時,天線的極化角是不同的。為了使天線更好地接收衛星信號,船載衛通站就要調整天線的極化面結構,進行饋源網絡的旋轉,即進入矩形波導的信號極化方向與矩形波導的窄邊或寬邊平行。饋源的滾動主要導致進入跟蹤接收機的和信號相位發生變化,而出航后的相位值還是碼頭期間的相位值,即此時相位值不再合適,使得天線跟蹤性能下降。在日常使用當中,發生相位漂移的主要原因是船載衛通站的地理位置不固定,在跟蹤線極化星時極化角一直在變化,船載衛通站的差信號從多模饋源輸出端口到和差網絡合成器的傳輸過程中,即引入的相位基本不變,但是由于和信號要經過極化器、極化旋轉關節等部件(見圖2),當極化角發生變化時,在極化面的調整過程中,和信號在達到和差網絡合成器的過程中會發生較大的相位變化,使最初的校相結果無法使用。
除此之外,也有其他方面的因素影響,比如:外界溫濕度變化比較大,與初始校相時的溫濕不一樣,各種電氣特性也會發生一定的變化,直接導致接收機相位發生輕微變化;船舶航行期間的震動搖晃等,對天線結構也造成一定的影響,使相位發生輕微變化。
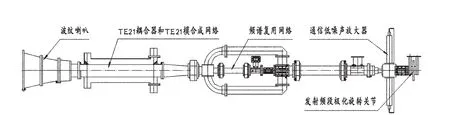
圖2 1天線饋源網絡結構
3 相位漂移后的調整方法
從以上分析可知,船載衛通站跟蹤接收機相位變化的主要原因是由極化角的變化引起的,要想消除極化角的影響,就要實時對跟蹤接收機相位值進行調整。在跟蹤的過程中,極化角的輕微變化對交叉耦合影響不是很大,但是如果極化角度變化超過一定的值,天線會因交叉耦合過大無法正常跟蹤。在天線結構中,如果饋源網絡旋轉180°,對于同一來波,從波導同軸轉換耦合出的信號也有了180°的相位變化,因此和/差通道之間的相位差也達到了180°,這個相位差基本是線性的,也就是說極化角變化1°,和/差通道之間就有1°的相位變化。通過這個原理,目前船載衛通站使用的跟蹤接收機已經加入相位修正,實際使用時,工作的相位值為接收機顯示的相位值與極化角的變化值之和。經過修正后,可以保證天線的精確、穩定跟蹤。

4 結語
雖然經過跟蹤接收機的相位修正,交叉耦合特性滿足天線的跟蹤要求,但是如果初始校相不是很好的話,特別是船舶地理位置跨象限時,在海上還需要對跟蹤接收機相位進行手動微調。目前海上校相的方式也有很多種,在以后的船載衛通站會有更多的應用與推廣。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06