地震模擬振動臺三參量控制參數(shù)整定技術(shù)的研究
2014-04-02 02:44:48欒強(qiáng)利陳章位徐進(jìn)榮賀惠農(nóng)
振動工程學(xué)報 2014年3期
關(guān)鍵詞:系統(tǒng)
欒強(qiáng)利, 陳章位, 徐進(jìn)榮, 賀惠農(nóng)
(1.浙江大學(xué)流體動力與機(jī)電系統(tǒng)國家重點(diǎn)實(shí)驗(yàn)室, 浙江 杭州 310027;2.杭州億恒科技有限公司, 浙江 杭州 310015)
引 言
地震模擬振動臺能夠在實(shí)驗(yàn)室中模擬試件的真實(shí)振動環(huán)境,實(shí)現(xiàn)對試件的抗振能力測試,其使用頻率低,承載能力強(qiáng),因而廣泛應(yīng)用于土木、車輛、航空航天等領(lǐng)域[1~4]。地震模擬振動臺伺服控制器采用三參量控制技術(shù),三參量控制技術(shù)充分考慮了地震模擬振動臺的位移、速度和加速度等信號,設(shè)置了三參量反饋、三參量前饋以及信號發(fā)生器等環(huán)節(jié),從而有效改善了模擬振動臺的系統(tǒng)傳遞特性。其中,三參量反饋能夠有效擴(kuò)展系統(tǒng)的頻率范圍,增加系統(tǒng)的阻尼,三參量前饋通過對消系統(tǒng)傳遞函數(shù)中距離虛軸較近的極點(diǎn),實(shí)現(xiàn)系統(tǒng)頻寬進(jìn)一步擴(kuò)展的目的,信號發(fā)生器主要用于控制信號的生成,包括位移、速度及加速度信號[5~9]。
三參量控制參數(shù)較多,主要參數(shù)包括系統(tǒng)前饋增益及反饋增益參數(shù)。三參量控制參數(shù)整定常通過參數(shù)試湊法,即通過逐個調(diào)整三參量控制參數(shù),并從中選擇對系統(tǒng)控制效果較好的一組參數(shù),實(shí)現(xiàn)三參量控制參數(shù)的整定。這種方法不僅工作量大,而且很難保證三參量控制參數(shù)的最優(yōu)。本文通過對三參量控制算法的研究,提出快速三參量控制參數(shù)整定方法,通過仿真及現(xiàn)場試驗(yàn)的方法,將傳統(tǒng)的三參量參數(shù)試湊法與快速三參量控制參數(shù)整定方法進(jìn)行試驗(yàn)結(jié)果對比,結(jié)果表明:快速參數(shù)整定方法的數(shù)值結(jié)果與通過參數(shù)試湊法得到的試驗(yàn)結(jié)果較為一致,保證數(shù)值結(jié)果的可靠性,另一方面,快速參數(shù)整定方法可以縮短控制參數(shù)的調(diào)節(jié)時間,實(shí)現(xiàn)三參量控制參數(shù)的快速整定[10~14]。
1 三參量控制及其參數(shù)整定
地震模擬振動臺系統(tǒng)開環(huán)傳遞函數(shù)為
(1)
式中ω0為液壓系統(tǒng)固有頻率,ζ0為液壓系統(tǒng)阻尼系數(shù),kv為液壓系統(tǒng)開環(huán)增益。
三參量控制原理如圖1所示,其中,kdf為位移反饋增益,kvf為速度反饋增益,kaf為加速度反饋增益,kdr為位移前饋增益,kvr為速度前饋增益,kar為加速度反饋增益。
三參量反饋控制可表示為
(2)
式中

圖1 三參量控制原理圖

(3)
式(2)可進(jìn)一步表示為
(4)
設(shè)
(5)
則
(6)
聯(lián)立式(5)和(6),則有
(7)

x3+px+q=0
(8)
其中
(9)
由卡爾丹公式
(10)
所以方程有一個實(shí)根,兩個虛根。實(shí)根為
(11)
由此可得到ωb,從而
(12)
三參量前饋通過對消系統(tǒng)傳遞函數(shù)中距離虛軸較近的極點(diǎn),實(shí)現(xiàn)系統(tǒng)頻寬的進(jìn)一步擴(kuò)展,由三參量反饋傳遞函數(shù)式(4)可知:
(1)如果ωb<ωc,那么三參量前饋環(huán)節(jié)應(yīng)抵消其一階慣性因子,則三參量前饋傳遞函數(shù)為
(13)
即
(14)
(2)如果ωb>ωc,那么三參量前饋環(huán)節(jié)應(yīng)抵消其二階振蕩因子,則三參量前饋傳遞函數(shù)為
(15)
即
(16)
2 三參量控制參數(shù)整定仿真
比較分析三參量控制快速參數(shù)整定與傳統(tǒng)參數(shù)試湊法得到的系統(tǒng)控制參數(shù)對系統(tǒng)傳遞特性的影響,同時,進(jìn)一步分析三參量各個控制參數(shù)對系統(tǒng)的作用。建立系統(tǒng)仿真模型如圖2所示,液壓系統(tǒng)固有頻率為40 Hz,阻尼比0.1,開環(huán)增益5,模型中考慮了系統(tǒng)因伺服閥遮蓋量、連接球鉸間隙等引起的波形失真,引入小量噪聲信號。

圖2 三參量控制仿真模型
三參量前饋信號發(fā)生器的離散化模型如圖3所示,生成系統(tǒng)的加速度、速度、位移信號;三參量反饋速度合成器的離散化模型如圖4所示,通過反饋位移和反饋加速度信號合成系統(tǒng)的反饋速度信號。

圖3 三參量控制信號發(fā)生器

圖4 三參量控制速度合成器
2.1 三參量反饋控制參數(shù)整定
三參量控制只有位移反饋控制時,設(shè)置控制參數(shù)如表1,得到系統(tǒng)Bode圖如圖5所示。

表1 三參量位移控制參數(shù)
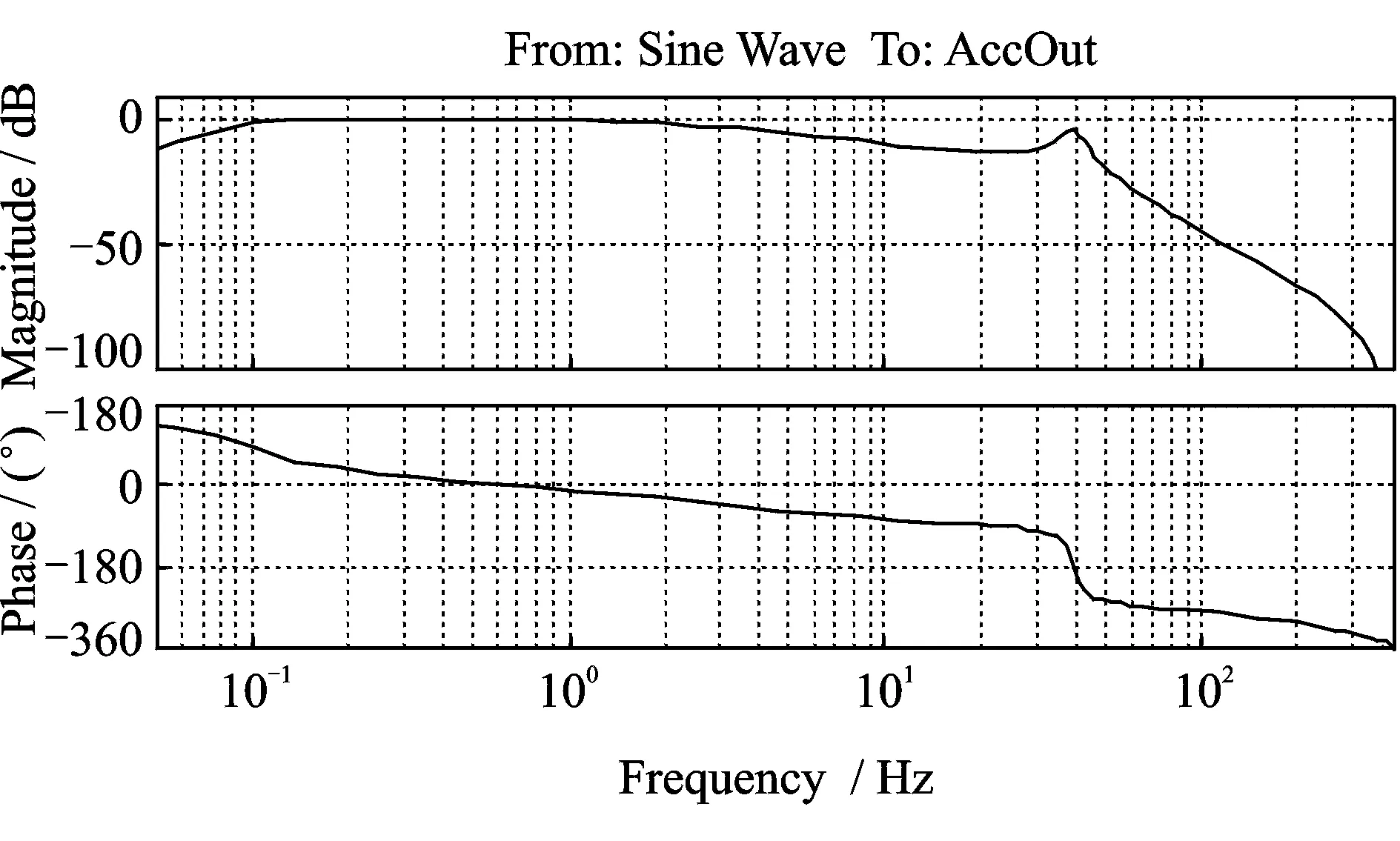
圖5 位移反饋控制系統(tǒng)Bode圖
由圖5可知,系統(tǒng)響應(yīng)幅值隨著頻率增加而衰減,3.25 Hz時幅值衰減3 dB,亦即系統(tǒng)頻寬為3.25 Hz。同時,40 Hz處存在共振峰,此即系統(tǒng)油柱共振峰。
三參量控制參數(shù)中引入速度反饋,控制參數(shù)如表2,系統(tǒng)Bode圖如圖6所示。

表2 三參量速度反饋控制參數(shù)

圖6 位移、速度反饋控制系統(tǒng)Bode圖
由圖6可知,通過引入速度反饋,系統(tǒng)的油柱共振頻率提高,移動至約60 Hz。
系統(tǒng)中引入加速度反饋控制,設(shè)置三參量控制參數(shù)如表3,得到系統(tǒng)的Bode圖如圖7所示。

表3 三參量加速度反饋控制參數(shù)

圖7 位移、速度、加速度反饋控制Bode圖
由圖7可知,系統(tǒng)共振峰值明顯降低(對比圖6),說明由于引入加速度反饋,明顯提高了系統(tǒng)的阻尼。
2.2 三參量前饋控制參數(shù)整定
在三參量反饋控制的基礎(chǔ)上(表3),引入三參量前饋控制,設(shè)置三參量前饋控制參數(shù)如表4所示,得到系統(tǒng)的Bode圖如圖8所示。

表4 三參量前饋控制參數(shù)
由圖8可見,系統(tǒng)Bode圖幅值曲線的高頻部分整體明顯提升(對比圖7),說明通過引入三參量前饋控制,可以進(jìn)一步校正系統(tǒng)頻響特性,擴(kuò)展系統(tǒng)的頻寬。

圖8 三參量前饋控制Bode圖
2.3 三參量控制快速參數(shù)整定
通過三參量控制快速參數(shù)整定方法確定系統(tǒng)控制參數(shù)。考慮把系統(tǒng)工作頻寬擴(kuò)展到90Hz,阻尼比提高到0.6,得到系統(tǒng)三參量控制參數(shù)如表5,系統(tǒng)Bode圖如圖9所示。

表5 快速參數(shù)整定三參量控制參數(shù)

圖9 快速參數(shù)整定三參量控制系統(tǒng)Bode圖
由圖9可知,系統(tǒng)幅值曲線平坦部分?jǐn)U展到90 Hz,其-3 dB頻率達(dá)到了110 Hz,系統(tǒng)工作頻寬擴(kuò)展到110 Hz,仿真結(jié)果說明了三參量控制快速參數(shù)整定算法的有效性。
3 三參量控制參數(shù)整定試驗(yàn)
為驗(yàn)證上述三參量控制快速參數(shù)整定方法的可靠性,證明三參量控制參數(shù)對系統(tǒng)傳遞特性的影響,以浙江大學(xué)流體動力與機(jī)電系統(tǒng)國家重點(diǎn)實(shí)驗(yàn)室的地震模擬振動臺為研究對象(圖10)進(jìn)行試驗(yàn)分析,相關(guān)參數(shù)如表6所示,振動控制器選用杭州億恒科技有限公司Premax系列振動控制器。

圖10 地震模擬振動臺

表6 地震模擬振動臺參數(shù)
計(jì)算得到系統(tǒng)的固有頻率和阻尼比:
3.1 三參量控制參數(shù)整定
通過參數(shù)試湊法與快速整定法完成對系統(tǒng)三參量控制參數(shù)的整定,整定過程對地震模擬振動臺系統(tǒng)進(jìn)行正弦掃頻試驗(yàn),掃頻頻率范圍為5~100 Hz,加速度目標(biāo)譜設(shè)置為0.5g恒定值。
3.1.1 速度反饋控制
速度反饋控制的作用是調(diào)節(jié)系統(tǒng)的共振頻率,通過引入速度負(fù)反饋可以將系統(tǒng)的共振頻率等效提高。這里通過四組實(shí)驗(yàn)的對比,研究速度反饋控制的實(shí)際效果,三參量控制參數(shù)如表7所示,得到系統(tǒng)的傳遞函數(shù)對應(yīng)圖11中的(a),(b),(c)和(d)所示(為便于觀察共振峰的變化,截取50~100 Hz圖像)。

表7 三參量速度反饋控制參數(shù)
由試驗(yàn)結(jié)果可知,在不引入速度反饋控制情況下,系統(tǒng)的油柱共振峰約位于75 Hz處(與理論值相近),通過引入速度反饋,系統(tǒng)的油柱共振峰分別移到了82 Hz(圖b)、90 Hz(圖c)、95 Hz(圖d),即油柱共振頻率逐級提高。
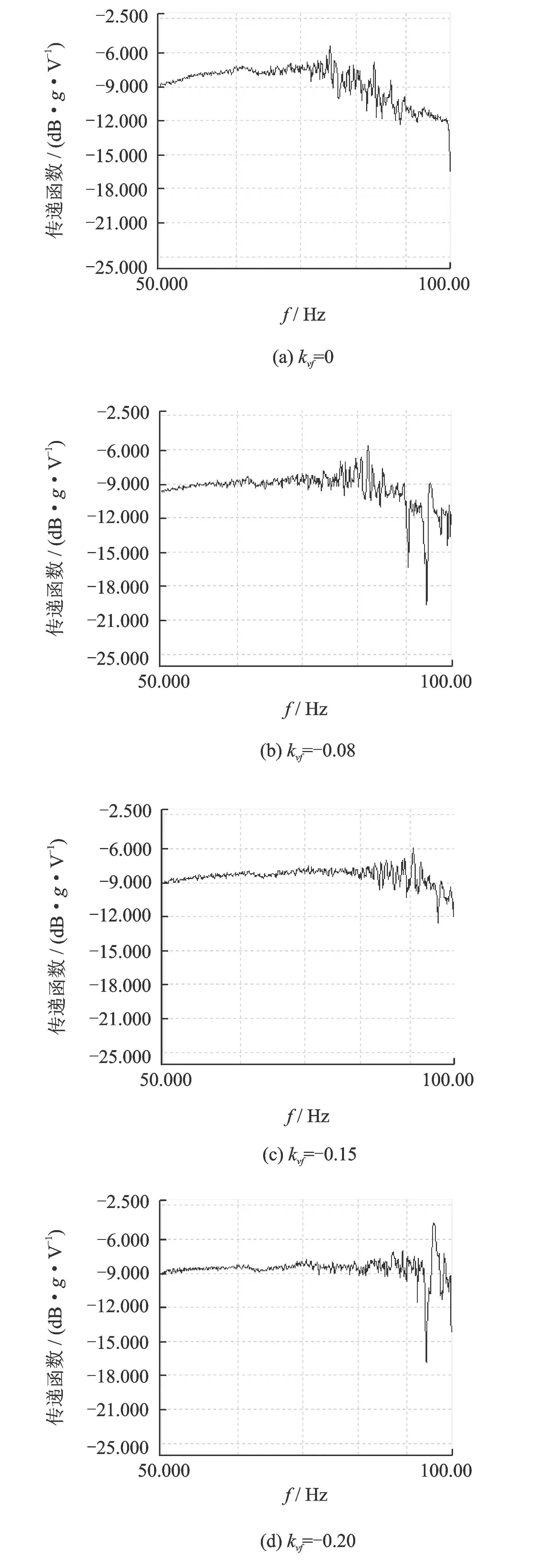
圖11 速度反饋對系統(tǒng)傳遞函數(shù)影響
3.1.2 加速度反饋控制
加速度反饋可以提高系統(tǒng)的阻尼,從而削低系統(tǒng)的油柱共振峰。為研究加速度反饋對系統(tǒng)傳遞特性的影響,設(shè)置四組試驗(yàn)參數(shù)(表8),試驗(yàn)結(jié)果分別對應(yīng)圖12中的(a),(b),(c)和(d)所示。

表8 三參量加速度反饋控制參數(shù)
圖12 加速度反饋對系統(tǒng)傳遞函數(shù)影響
由圖12試驗(yàn)結(jié)果可知,引入系統(tǒng)加速度反饋之后,由于系統(tǒng)阻尼的增大,使得系統(tǒng)油柱共振峰被削低。
3.1.3 三參量前饋控制
三參量前饋控制的作用是對消閉環(huán)傳遞函數(shù)中距離虛軸較近的極點(diǎn),達(dá)到擴(kuò)展系統(tǒng)頻寬的目的。這里通過三組試驗(yàn)對比(表9),觀察三參量前饋控制的實(shí)際控制效果,試驗(yàn)得到系統(tǒng)傳遞函數(shù)如圖13中(a),(b),(c)所示。

表9 三參量前饋控制參數(shù)

圖13 速度前饋對系統(tǒng)傳遞函數(shù)影響
由圖13試驗(yàn)結(jié)果可知,通過增加前饋控制量,使系統(tǒng)的頻響函數(shù)曲線整體上升,5~75 Hz范圍內(nèi)已經(jīng)較為平坦,基本保持在±3 dB范圍內(nèi)(35~40 Hz處受地面連接共同作用的影響出現(xiàn)了結(jié)構(gòu)共振),亦即在工作頻寬內(nèi),輸出信號能較好地復(fù)現(xiàn)輸入控制信號。
3.1.4 三參量控制快速參數(shù)整定
由三參量控制快速參數(shù)整定算法計(jì)算系統(tǒng)的控制參數(shù),已知系統(tǒng)的油柱共振頻率為75 Hz,阻尼比約為0.253,考慮把系統(tǒng)工作頻寬擴(kuò)展到90 Hz,把阻尼比提高到0.7以削低油柱共振峰,計(jì)算得到三參量控制參數(shù)如表10所示,試驗(yàn)得到的系統(tǒng)傳遞函數(shù)如圖14所示。

表10 快速參數(shù)整定三參量控制參數(shù)
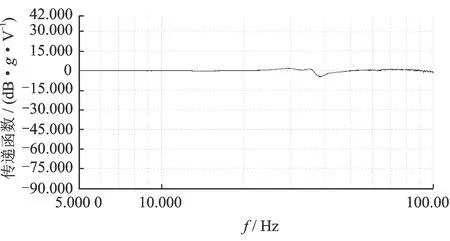
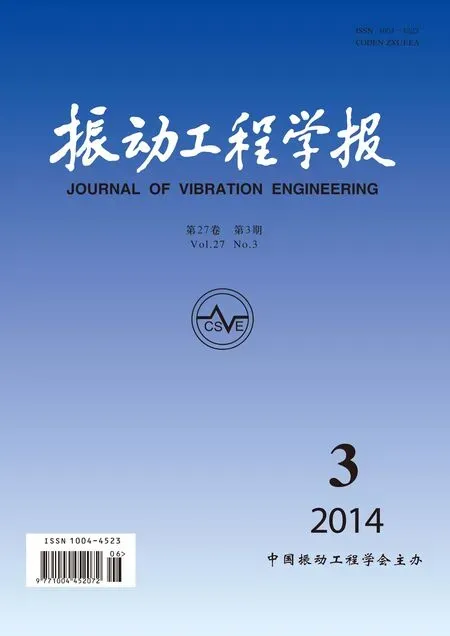
圖14 快速參數(shù)整定三參量控制系統(tǒng)傳遞函數(shù)
由圖14可知,系統(tǒng)傳遞函數(shù)曲線在5~90 Hz范圍已經(jīng)平坦,基本保持在±3 dB范圍內(nèi)(35~40 Hz處受地面連接共同作用的影響出現(xiàn)了結(jié)構(gòu)共振),輸出加速度信號能復(fù)現(xiàn)輸入控制信號。試驗(yàn)表明,三參考控制快速參數(shù)整定算法具有良好的整定效果,通過三參量控制,可以把系統(tǒng)傳遞函數(shù)曲線校正到理想的水平。
3.2 波形失真度檢測
3.2.1 加速度控制試驗(yàn)
對三參量控制的地震模擬振動臺進(jìn)行正弦駐留試驗(yàn)(三參量控制參數(shù)如表10所示),正弦頻率分別為5,10,50,80 Hz,加速度目標(biāo)值0.8g,得到系統(tǒng)的加速度時域響應(yīng)曲線如圖15中(a),(b),(c),(d)所示。

圖15 不同頻率下振動臺加速度控制波形
加速度控制試驗(yàn)對應(yīng)的系統(tǒng)波形失真度如表11所示。

表11 加速度控制系統(tǒng)波形失真度
由波形失真度分析可知(表11),系統(tǒng)引入三參量控制后, 5,10,50和80 Hz的加速度時域信號波形失真度均符合國家標(biāo)準(zhǔn)《液壓式振動試驗(yàn)臺檢定規(guī)程(JJG638-90)》規(guī)定的25%以內(nèi)。
原型地震波的頻譜范圍一般在0.25~10 Hz,因地震模擬試驗(yàn)大多情況下是進(jìn)行縮尺模型試驗(yàn),考慮到模型相似率的要求,相似模擬的頻率要升高,亦即要提高使用頻率的上限。就地震模擬試驗(yàn)臺的規(guī)模大小而言,一般大型地震模擬試驗(yàn)臺使用頻帶上限要求為30 Hz,中型地震模擬試驗(yàn)臺為50 Hz,小型地震模擬試驗(yàn)臺為80 Hz。因此通過三參量控制調(diào)試,把系統(tǒng)頻寬擴(kuò)展到90 Hz已能滿足地震模擬試驗(yàn)的要求。
3.2.2 位移控制試驗(yàn)
地震模擬振動臺低頻性能一般以位移響應(yīng)波形失真度來衡量,而工作頻率低是地震模擬試驗(yàn)的一個重要特點(diǎn),因此,對地震模擬振動臺進(jìn)行低頻位移試驗(yàn),頻率分別為0.2,0.5,1和2 Hz,對應(yīng)的試驗(yàn)結(jié)果分別對應(yīng)如圖16中的(a),(b),(c),(d)所示。

圖16 不同頻率下振動臺位移控制波形
位移控制試驗(yàn)對應(yīng)的系統(tǒng)波形失真度如表12所示。

表12 位移控制系統(tǒng)波形失真度
表12位移波形失真度均符合國家標(biāo)準(zhǔn)《液壓式振動試驗(yàn)臺檢定規(guī)程(JJG638-90)》規(guī)定的位移波形失真度5%以內(nèi)的要求。
4 結(jié) 論
通過對地震模擬振動臺三參量控制算法的研究,提出了一種快速三參量控制參數(shù)整定方法。并通過仿真和試驗(yàn)的方法,驗(yàn)證了這種參數(shù)整定方法的可行性,相比于傳統(tǒng)三參量控制參數(shù)整定過程,這種方法可以極大提高三參量控制參數(shù)整定的效率,同時能夠保持較高的準(zhǔn)確性,可有效保證地震模擬試驗(yàn)過程中波形的復(fù)現(xiàn)精度。
參考文獻(xiàn):
[1] 黃浩華. 地震模擬振動臺的設(shè)計(jì)與應(yīng)用技術(shù)[M]. 北京:地震出版社, 2008.Huang Haohua. Shaking Table Design and Application Technology [M]. Beijing: Seismological Press, 2008.
[2] 邱法維,錢稼茹,陳志鵬. 結(jié)構(gòu)抗震實(shí)驗(yàn)方法[M]. 北京:科學(xué)出版社,2000.Qiu Fawei, Qian Jiaru, Chen Zhipeng. Seismic Test Methodology for Structures [M]. Beijing: Science Press, 2000.
[3] 邱法維, 沙鋒強(qiáng), 王剛,等. 地震模擬振動臺控制技術(shù)及軟件研究[J]. 液壓與氣動, 2011, (6): 98—101.Qiu Fawei, Sha Fengqiang, Wang Gang, et al. Shaking table control technology and software research [J]. Chinese Hydraulics and Pneumatics, 2011, (6): 98—101.
[4] 唐貞云, 李振寶, 紀(jì)金豹,等. 地震模擬振動臺控制系統(tǒng)的發(fā)展[J]. 地震工程與工程振動, 2009, 29(6): 162—169.Tang Zhenyun, Li Zhenbao, Ji Jinbao, et al. Development in shaking table control system [J]. Journal of Earthquake Engineering and Engineering Vibration, 2009, 29(6): 162—169.
[5] 韓俊偉, 李玉亭, 胡寶生. 大型三向六白由度地震模擬振動臺[J]. 地震學(xué)報, 1998, 20(3): 327—331.Han Junwei, Li Yuting, Hu Baosheng. Large scale 3 dimension and 6 degree of freedom shaking table [J]. Earthquake Science, 1998, 20(3): 327—331.
[6] Tagawa Y, Kajiwara K. Controller development for the E—Defense shaking table [J]. Proceedings of the institution of mechanical engineers, Part I: Journal of Systems and Control Engineering, 2007, 221(2): 171—181.
[7] Shortreed J S, Seible F, Benzoni G. Simulation issues with a real-time, full-scale seismic testing system [J]. Journal of Earthquake Engineering, 2002, 6(Sp. Iss. S1): 185—201.
[8] Stoten D P, Shimizu N. The feedforward minimal control synthesis algorithm and its application to the control of shaking-tables [J]. Proceedings of the institution of mechanical engineers, Part I: Journal of Systems and Control Engineering, 2007, 221(3): 423—444.
[9] Ammanagi S, Poornima V, Sera A, et al. Development of a digitally-controlled three-axis earthquake shake table [J]. Current Science, 2006, 91(2): 190—203.
[10] 王燕華, 程文瀼. 地震模擬振動臺運(yùn)動控制性能分析[J]. 振動與沖擊, 2012, 29(2): 99—106.Wang Yanhua, Cheng Wenrang. Dynamic property of a shaking table simulating earthquake [J]. Journal of Vibration and Shock, 2012, 29(2): 99—106.
[11] 楊志東. 液壓振動臺振動環(huán)境模擬的控制技術(shù)研究[D]. 哈爾濱: 哈爾濱工業(yè)大學(xué),2009.Yang Zhidong. Research of control technologies of simulation of vibration environment using hydraulic vibration table [D]. Harbin: Harbin Institute of Technology, 2009.
[12] Xu Y, Hua H X, Han J W. Modeling and controller design of a shaking table in an active structural control system [J]. Mechanical Systems and Signal Processing, 2008, 22(8): 1 917 —1 923
[13] 韓俊偉,于麗明,趙慧,等.地震模擬振動臺三狀態(tài)控制的研究[J].哈爾濱工業(yè)大學(xué)學(xué)報, 1999, 31( 3): 21— 28.Han Junwei, Yu Liming, Zhao Hui, et al. Study of three state controller of seismic simulating shaking table [J]. Journal of Harbin Institute of Technology, 1999, 31( 3): 21— 28.
[14] 李振寶, 唐貞云, 紀(jì)金豹. 地震模擬振動臺三參量控制算法超調(diào)修正[J]. 振動與沖擊, 2010, 29(10): 211—215.Li Zhenbao, Tang Zhenyun, Ji Jinbao. Overshoot modification of shaking table TVC algorithm [J]. Journal of Vibration and Shock, 2010, 29(10): 211—215.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32