旋轉(zhuǎn)流場(chǎng)下的振蕩動(dòng)導(dǎo)數(shù)試驗(yàn)技術(shù)研究
2014-03-30 06:37:06吳金華孫海生沈志洪姜裕標(biāo)
實(shí)驗(yàn)流體力學(xué) 2014年4期
吳金華, 孫海生, 沈志洪, 姜裕標(biāo)
(中國(guó)空氣動(dòng)力研究與發(fā)展中心, 四川 綿陽(yáng) 621000)

符 號(hào) 說(shuō) 明
0 引 言
良好的過(guò)失速機(jī)動(dòng)能力是評(píng)價(jià)現(xiàn)代戰(zhàn)機(jī)性能的重要指標(biāo)之一。但飛機(jī)在過(guò)失速機(jī)動(dòng)過(guò)程中經(jīng)常由于進(jìn)入尾旋而失事。因此,研究飛機(jī)在旋轉(zhuǎn)流場(chǎng)下的非定常氣動(dòng)特性,對(duì)于研究飛機(jī)的抗偏離/尾旋特性以及尾旋改出特性有著重要的意義。
通過(guò)風(fēng)洞試驗(yàn)獲取動(dòng)導(dǎo)數(shù)參數(shù)是主要研究方法之一。早期的研究人員寄希望于將穩(wěn)定尾旋的旋轉(zhuǎn)天平試驗(yàn)數(shù)據(jù)和單自由度動(dòng)導(dǎo)數(shù)試驗(yàn)數(shù)據(jù)結(jié)合起來(lái),估算旋轉(zhuǎn)流場(chǎng)下的振蕩動(dòng)導(dǎo)數(shù),但這種方法并不可靠[1]。Jacob Kay利用F-16和F-22模型在12ft立式風(fēng)洞中進(jìn)行了旋轉(zhuǎn)天平加強(qiáng)迫振蕩試驗(yàn),試驗(yàn)數(shù)據(jù)同樣表明在大迎角范圍內(nèi),尤其是同時(shí)有較大側(cè)滑角姿態(tài)下,振蕩尾旋的非定常氣動(dòng)特性與穩(wěn)定尾旋相比有較大差距,體現(xiàn)出更強(qiáng)的非線(xiàn)性[2]。因此,國(guó)內(nèi)外研究機(jī)構(gòu)相繼開(kāi)發(fā)各自的試驗(yàn)技術(shù)來(lái)進(jìn)行相關(guān)的研究工作[3-6]。由于開(kāi)展風(fēng)洞試驗(yàn)技術(shù)研究的重要性,故基于中國(guó)空氣動(dòng)力研究與發(fā)展中心低速所Φ5m立式風(fēng)洞平臺(tái)開(kāi)展了旋轉(zhuǎn)流場(chǎng)下的振蕩動(dòng)導(dǎo)數(shù)試驗(yàn)技術(shù)研究。該技術(shù)是國(guó)內(nèi)首次在立式風(fēng)洞開(kāi)展,為研究飛機(jī)的抗偏離/尾旋特性以及尾旋改出特性奠定試驗(yàn)基礎(chǔ)。
動(dòng)導(dǎo)數(shù)風(fēng)洞試驗(yàn)的關(guān)鍵在于如何獲取動(dòng)導(dǎo)數(shù)參數(shù)。本文著重闡述了在旋轉(zhuǎn)/振蕩耦合運(yùn)動(dòng)下識(shí)別組合動(dòng)導(dǎo)數(shù)的方法,然后通過(guò)風(fēng)洞試驗(yàn)獲得了3個(gè)組合動(dòng)導(dǎo)數(shù)試驗(yàn)數(shù)據(jù),并給出簡(jiǎn)要分析和討論。
1 試驗(yàn)原理
由于旋轉(zhuǎn)運(yùn)動(dòng)和振蕩運(yùn)動(dòng)耦合,因此本項(xiàng)研究的難點(diǎn)是在耦合運(yùn)動(dòng)下如何識(shí)別組合動(dòng)導(dǎo)數(shù)參數(shù)。下面將從運(yùn)動(dòng)學(xué)方程的角度出發(fā),利用線(xiàn)性小擾動(dòng)假設(shè)推導(dǎo)識(shí)別組合動(dòng)導(dǎo)數(shù)的方法。
1.1運(yùn)動(dòng)方程
根據(jù)各個(gè)坐標(biāo)系之間的角度轉(zhuǎn)換關(guān)系,飛機(jī)模型的迎角α和側(cè)滑角β的表達(dá)式如式(1)所示[7]。其中:θ為俯仰角;ψ為偏航角;φ為滾轉(zhuǎn)角;χ為航跡偏角,γ為航跡傾角。
sinβ=sinθsinφcos(ψ-χ)cosγ
-cosφsin(ψ-χ)cosγ
-sinγsinφcosθ
(1)
當(dāng)模型安裝在立式風(fēng)洞旋轉(zhuǎn)天平裝置中時(shí),為典型的“Γ”型結(jié)構(gòu),同時(shí)χ=γ=0。在無(wú)預(yù)置的條件下,模型的偏航角度始終為零,即使是在偏航振蕩中,由于是繞著零點(diǎn)做小幅振蕩,也可近似認(rèn)為偏航角為零。則式(1)可以化簡(jiǎn)為:
sinβ=sinθsinφ
(2)
從而得到迎角α和側(cè)滑角β關(guān)于俯仰角θ和滾轉(zhuǎn)角φ的表達(dá)式:
tanα=tanθcosφ
sinβ=sinθsinφ
(3)
將式(1)對(duì)時(shí)間求導(dǎo),并利用繞體軸的角速度p,q和r來(lái)表示迎角和側(cè)滑角的變化率為:


(4)
1.2動(dòng)導(dǎo)數(shù)參數(shù)識(shí)別
依據(jù)線(xiàn)性假設(shè)理論,分開(kāi)縱向和橫向的影響,氣動(dòng)系數(shù)數(shù)學(xué)模型為:

(5)
式中:C為動(dòng)態(tài)氣動(dòng)力,C0為靜態(tài)氣動(dòng)力。
以旋轉(zhuǎn)/俯仰耦合振蕩為例,當(dāng)模型以Ω的角速度進(jìn)行旋轉(zhuǎn)運(yùn)動(dòng),并且同時(shí)繞體軸以角位移Θ(t)=Θsinωt的方式進(jìn)行俯仰耦合振蕩時(shí),其縱向運(yùn)動(dòng)方程為:
Δα=Θ(t)=Θsinωt


(6)
將式(6)帶入式(5)縱向氣動(dòng)系數(shù)中化簡(jiǎn)可得:
(7)
另一方面,依據(jù)小擾動(dòng)假設(shè)縱向氣動(dòng)系數(shù)還可以表示為[8]:
(8)

(9)

2 試驗(yàn)設(shè)備
2.1旋轉(zhuǎn)天平裝置
Φ5m立式風(fēng)洞旋轉(zhuǎn)天平裝置如圖1所示,交流變頻異步電機(jī)通過(guò)減速器、彈性聯(lián)軸器、中心體和旋轉(zhuǎn)軸來(lái)驅(qū)動(dòng)圓弧軌道繞著平行于風(fēng)洞來(lái)流方向的軸線(xiàn)做正向或反向旋轉(zhuǎn)。最高轉(zhuǎn)速可達(dá)100r/min,轉(zhuǎn)速控制精度為1%。支撐裝置通過(guò)滑車(chē)連接到半徑為2m的圓弧軌道上,滑車(chē)在圓弧軌道上的移動(dòng)可以改變模型的俯仰角度,并保證模型的旋轉(zhuǎn)中心不變,支桿通過(guò)繞自身軸線(xiàn)的旋轉(zhuǎn)改變模型的滾轉(zhuǎn)角,兩者的結(jié)合即可獲得所要求模型的迎角和側(cè)滑角[9]。

圖1 旋轉(zhuǎn)天平試驗(yàn)裝置圖
2.2俯仰支撐裝置
俯仰支撐裝置采用平行四邊形機(jī)構(gòu),如圖2所示。主支桿起固定連接和承受載荷的作用,調(diào)節(jié)桿通過(guò)兩端左旋和右旋螺紋來(lái)精確保證天平套筒與搖擺桿平行,運(yùn)動(dòng)控制通過(guò)搖擺桿、尾支桿、調(diào)節(jié)桿、等直桿傳遞到天平套筒。搖擺桿上連接減速器軸和尾支桿的兩個(gè)鉸接點(diǎn),以及天平套筒上連接尾接頭和主接頭的兩個(gè)鉸接點(diǎn),二者平行且相等,那么依據(jù)平行四邊形原理,搖擺桿的轉(zhuǎn)動(dòng)角度與天平套筒的轉(zhuǎn)動(dòng)角度相同,因此伺服電機(jī)通過(guò)減速器控制搖擺桿做正弦振蕩運(yùn)動(dòng),就能保證天平套筒和模型能夠進(jìn)行相同的正弦振蕩運(yùn)動(dòng)。俯仰振蕩頻率范圍為0.05~1.5Hz,最大振幅可達(dá)35°。
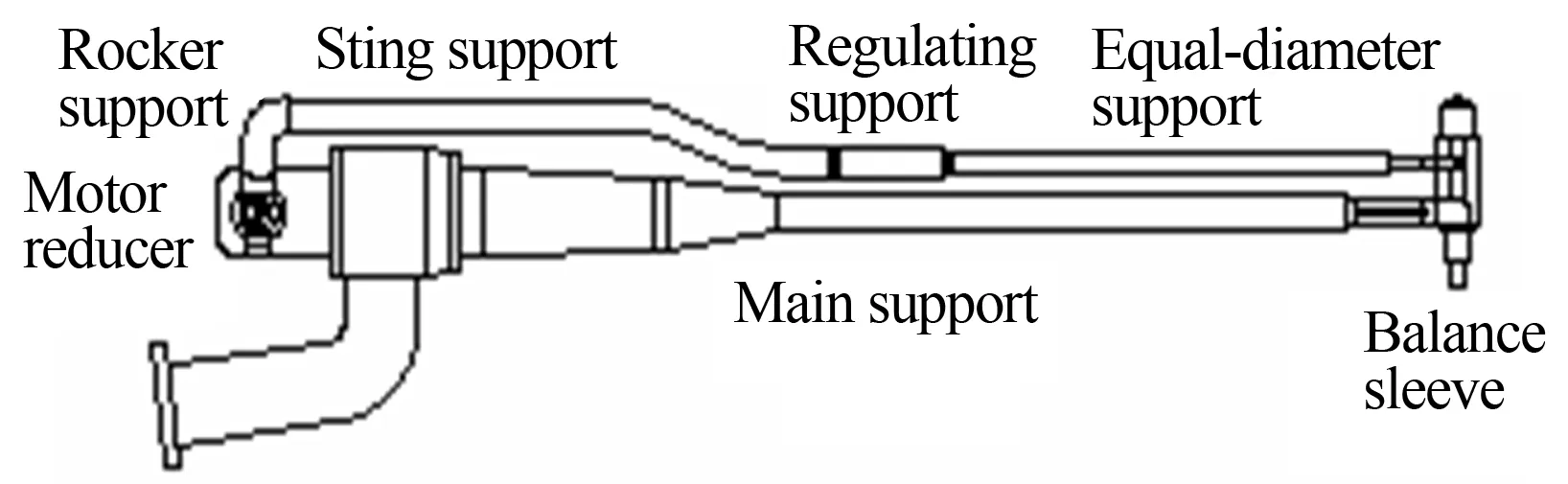
圖2 俯仰支撐裝置結(jié)構(gòu)示意圖
2.3滾轉(zhuǎn)/偏航支撐裝置
滾轉(zhuǎn)/偏航支撐系統(tǒng)結(jié)構(gòu)圖如圖3所示,電機(jī)與減速器相連并固連在支撐彎管上,電機(jī)、減速器、電位器安裝軸和支桿依次相連,從而電機(jī)輸出的扭矩依次傳遞最終達(dá)到支桿前端的天平模型。支桿通過(guò)一組“背對(duì)背”式的單列圓錐滾子軸承支承在轉(zhuǎn)軸座上,從而確保了支桿與轉(zhuǎn)軸座之間只存在相對(duì)滾轉(zhuǎn)的自由度。當(dāng)以尾撐方式安裝模型時(shí),則可以做滾轉(zhuǎn)振蕩,當(dāng)加上偏航天平轉(zhuǎn)接套筒時(shí),則可以以背撐或腹撐的方式安裝模型,從而進(jìn)行偏航振蕩。滾轉(zhuǎn)/偏航振蕩頻率范圍為0.05~2.5Hz,最大振幅可達(dá)35°。
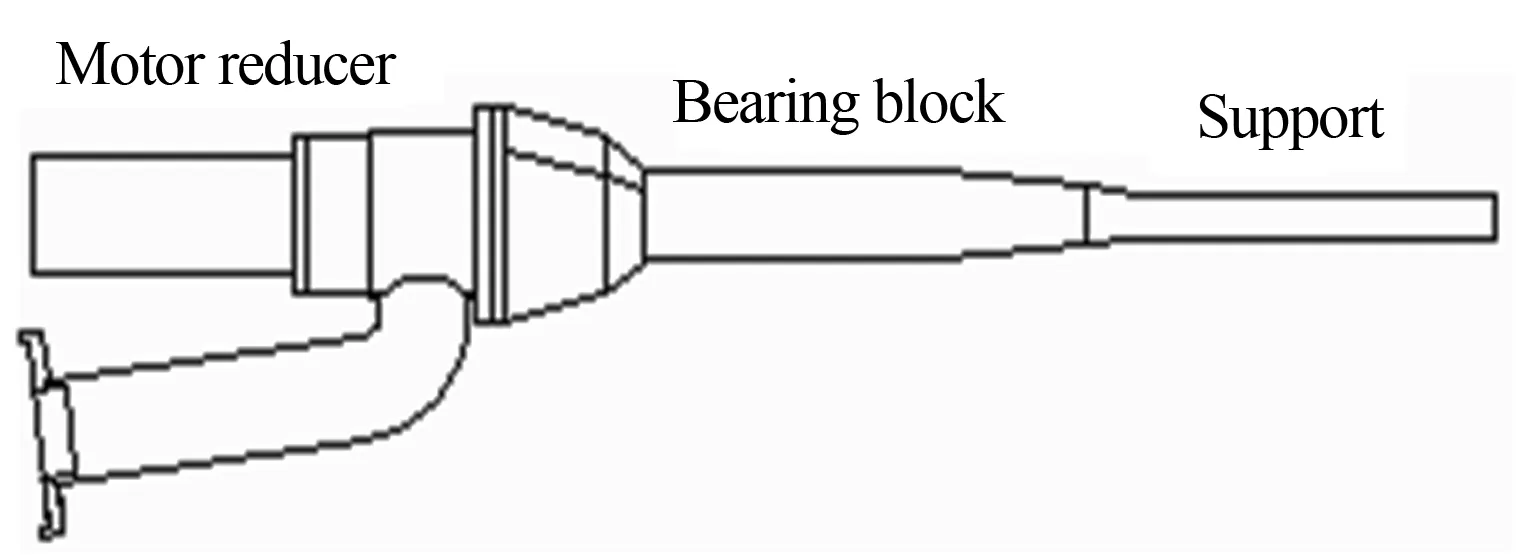
圖3 滾轉(zhuǎn)/偏航支撐裝置結(jié)構(gòu)示意圖
3 試驗(yàn)結(jié)果與討論
3.1不同風(fēng)洞的結(jié)果對(duì)比
圖4~6分別給出了Φ5m立式風(fēng)洞旋轉(zhuǎn)天平裝置與Φ3.2m風(fēng)洞張線(xiàn)裝置單自由度俯仰振蕩、偏航振蕩和滾轉(zhuǎn)振蕩的結(jié)果對(duì)比。試驗(yàn)條件為:30m/s風(fēng)速,1Hz振蕩頻率和2.5°振幅。從3張圖可以看出,兩個(gè)風(fēng)洞試驗(yàn)的3個(gè)組合動(dòng)導(dǎo)數(shù)曲線(xiàn)隨迎角的變化趨勢(shì)是一致的。在失速迎角40°之前,組合動(dòng)導(dǎo)數(shù)結(jié)果緩慢變化,兩個(gè)不同風(fēng)洞裝置試驗(yàn)結(jié)果的不同僅僅體現(xiàn)在量值上的微小差別,立式風(fēng)洞旋轉(zhuǎn)天平裝置在失速前的結(jié)果比Φ3.2m風(fēng)洞張線(xiàn)裝置結(jié)果的波動(dòng)變化更大。在失速之后,兩個(gè)風(fēng)洞裝置的結(jié)果都表現(xiàn)出組合動(dòng)導(dǎo)數(shù)先減小后增大的趨勢(shì),所不同的是立式風(fēng)洞旋轉(zhuǎn)天平裝置的峰值變化更大。在文獻(xiàn)[10]中旋轉(zhuǎn)天平裝置與Φ3.2m風(fēng)洞張線(xiàn)裝置靜態(tài)結(jié)果相比,出現(xiàn)了在失速區(qū)的升力和俯仰力矩有更大變化梯度的現(xiàn)象。結(jié)合這兩種現(xiàn)象,初步推斷可能是由于旋轉(zhuǎn)天平裝置本身的支撐干擾在失速區(qū)加劇了流動(dòng)分離現(xiàn)象,從而導(dǎo)致了動(dòng)態(tài)信號(hào)的非線(xiàn)性更加強(qiáng)烈。因此對(duì)比試驗(yàn)結(jié)果可知,該試驗(yàn)技術(shù)合理可靠。
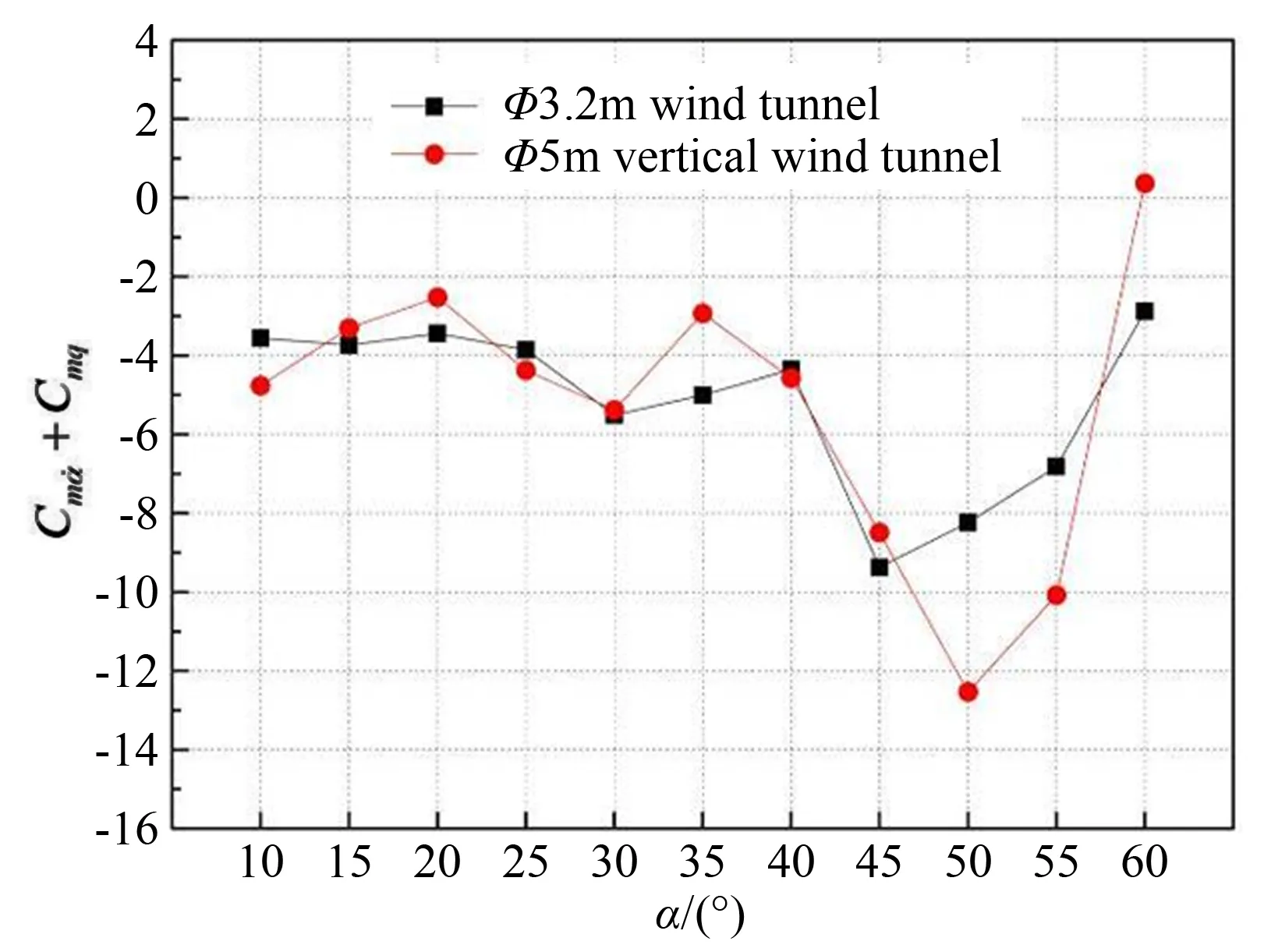
圖4 俯仰組合動(dòng)導(dǎo)數(shù)的結(jié)果對(duì)比
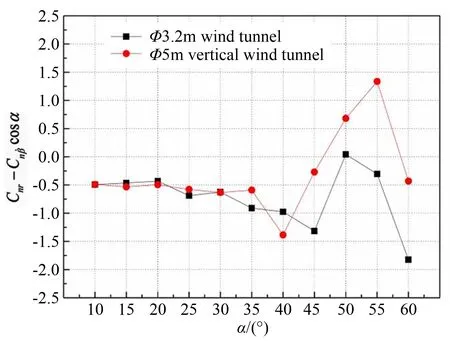
圖5 偏航組合動(dòng)導(dǎo)數(shù)的結(jié)果對(duì)比
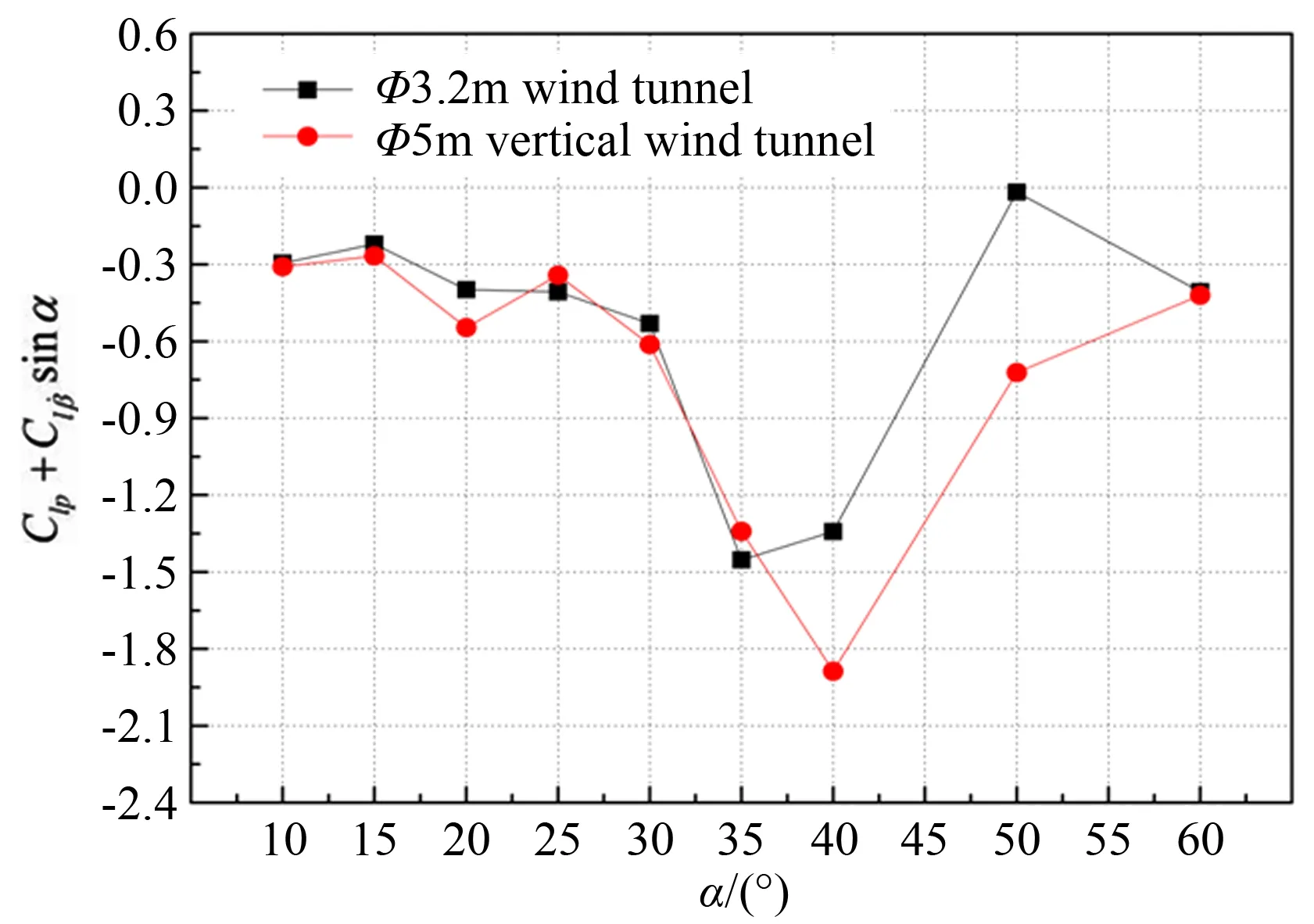
圖6 滾轉(zhuǎn)組合動(dòng)導(dǎo)數(shù)的結(jié)果對(duì)比
3.2旋轉(zhuǎn)對(duì)于動(dòng)態(tài)結(jié)果的影響
圖7給出了旋轉(zhuǎn)/俯仰振蕩耦合試驗(yàn)在不同旋轉(zhuǎn)速度下俯仰組合動(dòng)導(dǎo)數(shù)的結(jié)果。結(jié)果表明轉(zhuǎn)速的變化對(duì)于俯仰組合動(dòng)導(dǎo)數(shù)有著明顯的影響。小轉(zhuǎn)速下(λ≤0.03),在失速之前,組合動(dòng)導(dǎo)數(shù)結(jié)果隨迎角變化緩慢,直至失速區(qū)由于分離而變化劇烈。在大轉(zhuǎn)速下組合動(dòng)導(dǎo)數(shù)隨迎角增大產(chǎn)生明顯波動(dòng),說(shuō)明較高的旋轉(zhuǎn)速度會(huì)明顯增強(qiáng)縱向組合動(dòng)導(dǎo)數(shù)的非線(xiàn)性,使得組合動(dòng)導(dǎo)數(shù)變得極不穩(wěn)定。
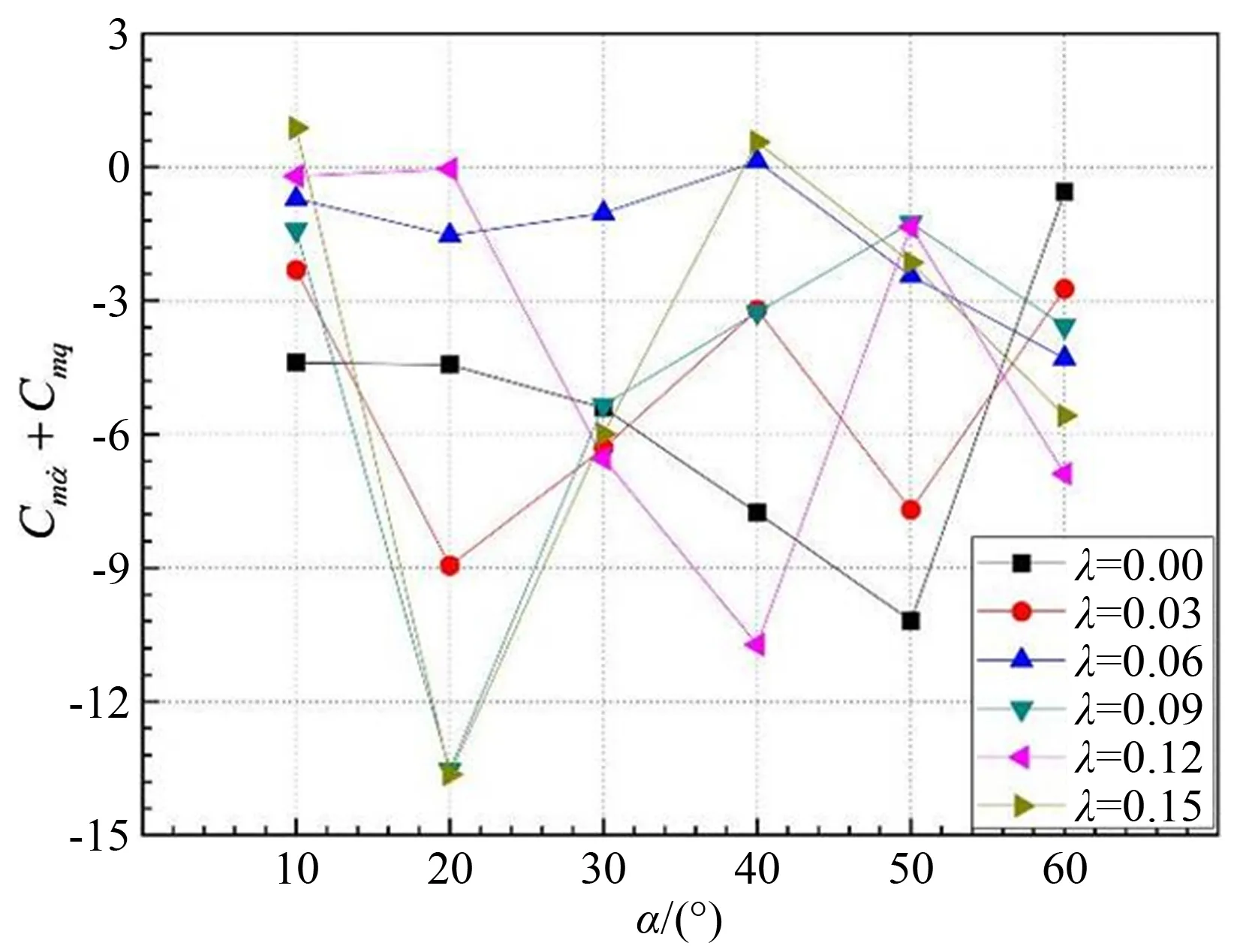
圖7 旋轉(zhuǎn)/俯仰耦合振蕩組合動(dòng)導(dǎo)數(shù)的轉(zhuǎn)速影響曲線(xiàn)
圖8給出了旋轉(zhuǎn)/偏航振蕩耦合試驗(yàn)在不同旋轉(zhuǎn)速度下偏航組合動(dòng)導(dǎo)數(shù)的結(jié)果。從結(jié)果可以看出,當(dāng)λ≤0.03時(shí),偏航組合動(dòng)導(dǎo)數(shù)呈現(xiàn)先減小后增大再減小的變化趨勢(shì),但當(dāng)λ≥0.06時(shí),逐漸演變成只呈現(xiàn)先減小再增大的變化,說(shuō)明旋轉(zhuǎn)運(yùn)動(dòng)改變了失速區(qū)后流場(chǎng)的變化,甚至有可能在大轉(zhuǎn)速大迎角下,改變偏航組合動(dòng)導(dǎo)數(shù)的符號(hào),進(jìn)而變得動(dòng)不穩(wěn)定。
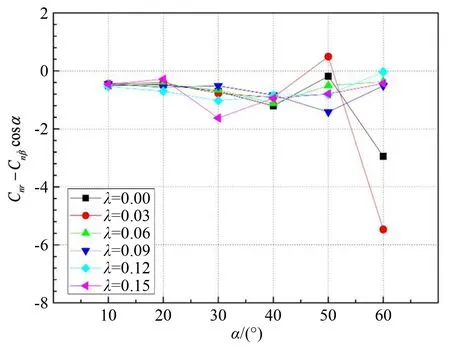
圖8 旋轉(zhuǎn)/偏航耦合振蕩組合動(dòng)導(dǎo)數(shù)的轉(zhuǎn)速影響曲線(xiàn)
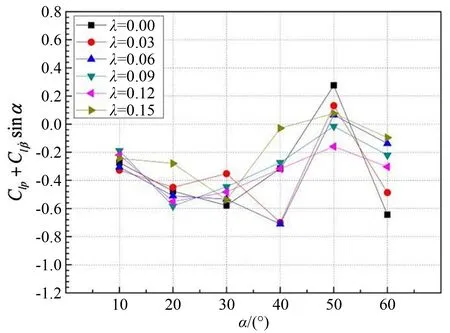
圖9 旋轉(zhuǎn)/滾轉(zhuǎn)耦合振蕩組合動(dòng)導(dǎo)數(shù)的轉(zhuǎn)速影響曲線(xiàn)
圖9給出了旋轉(zhuǎn)/滾轉(zhuǎn)振蕩耦合試驗(yàn)在不同旋轉(zhuǎn)速度下滾轉(zhuǎn)組合動(dòng)導(dǎo)數(shù)的結(jié)果。從結(jié)果可以看出,轉(zhuǎn)速不大時(shí)(λ≤0.09),轉(zhuǎn)速對(duì)于滾轉(zhuǎn)組合動(dòng)導(dǎo)數(shù)的結(jié)果影響并不明顯,各個(gè)轉(zhuǎn)速下的滾轉(zhuǎn)組合動(dòng)導(dǎo)數(shù)隨迎角的變化趨勢(shì)一致。但在大轉(zhuǎn)速下,失速迎角之后的組合動(dòng)導(dǎo)數(shù)和相同迎角不同轉(zhuǎn)速的結(jié)果相比,波動(dòng)變化明顯增大,可見(jiàn),旋轉(zhuǎn)運(yùn)動(dòng)在大迎角失速區(qū)域增大了滾轉(zhuǎn)振蕩的非線(xiàn)性,該結(jié)果與文獻(xiàn)[2]中的旋轉(zhuǎn)/滾轉(zhuǎn)耦合振蕩結(jié)果相符。
4 結(jié) 論
詳細(xì)介紹了在中國(guó)空氣動(dòng)力研究與發(fā)展中心低速所Φ5m立式風(fēng)洞建立的旋轉(zhuǎn)流場(chǎng)下的振蕩動(dòng)導(dǎo)數(shù)試驗(yàn)技術(shù),詳細(xì)推導(dǎo)了旋轉(zhuǎn)/振蕩耦合運(yùn)動(dòng)學(xué)方程,并以旋轉(zhuǎn)/俯仰振蕩耦合為例,給出了旋轉(zhuǎn)/振蕩運(yùn)動(dòng)狀態(tài)下識(shí)別動(dòng)導(dǎo)數(shù)的方法。進(jìn)行單自由度對(duì)比試驗(yàn)的結(jié)果表明,40°失速之前Φ5m立式風(fēng)洞和Φ3.2m風(fēng)洞的數(shù)據(jù)有較好的一致性,數(shù)據(jù)合理可靠,達(dá)到試驗(yàn)要求。旋轉(zhuǎn)/振蕩耦合試驗(yàn)結(jié)果表明,旋轉(zhuǎn)運(yùn)動(dòng)對(duì)于縱向俯仰組合動(dòng)導(dǎo)數(shù)有明顯的影響,使得組合動(dòng)導(dǎo)數(shù)變得極不穩(wěn)定。對(duì)于橫向組合動(dòng)導(dǎo)數(shù),小轉(zhuǎn)速不改變組合動(dòng)導(dǎo)數(shù)隨迎角的變化趨勢(shì),但有量值上的區(qū)別。大轉(zhuǎn)速顯著增強(qiáng)結(jié)果的波動(dòng)性,甚至改變組合動(dòng)導(dǎo)數(shù)的符號(hào),表明旋轉(zhuǎn)運(yùn)動(dòng)加劇了非定常氣動(dòng)特性的非線(xiàn)性。
建立的旋轉(zhuǎn)流場(chǎng)下的振蕩動(dòng)導(dǎo)數(shù)試驗(yàn)技術(shù)能夠?yàn)樾D(zhuǎn)流場(chǎng)下飛機(jī)的非定常氣動(dòng)特性研究提供一個(gè)有效的試驗(yàn)平臺(tái)。
參考文獻(xiàn):
[1]Ericsson L E. Rotary-balance testing for aircraft dynamics[R]. AGARD AR-265,1990.
[2]Jacob Kay. Acquiring modeling unsteady aerodynamic characteristic[C]. AIAA Atmospheric Flight Mechanics Conference, 14-17 2000.8/Denver, CO.
[3]D Bruce Owens, Jay M Brandon, Mark A Croom. Overview of dynamic test techniques for flight dynamics research at NASA LaRC (Invited)[J]. AIAA NASA VA, 23681, 2003.
[4]Hultberg R S. Multi-axis test rig for the AFRL vertical wind tunnel[R]. AFRL-VA-WP-TR-1998-3036, May 1998.
[5]Cooperative Programme on dynamic wind tunnel experiments for manoeuvring aircraft[R]. Agard Advisory Report. 305.
[6]杜希奇, 卜忱, 于彥澤, 等. 低速風(fēng)洞旋轉(zhuǎn)流場(chǎng)下滾轉(zhuǎn)振蕩動(dòng)導(dǎo)數(shù)試驗(yàn)技術(shù)研究[J]. 實(shí)驗(yàn)流體力學(xué), 2005, 19(4): 46-48.
Du Xiqi, Bu chen, Yu Yanze, et al. Investigation of roll oscillation dynamical stability derivative in rotation flow field[J]. Journal of Experiments in Fluid Mechanics, 2005, 19(4): 46-48.
[7]方振平, 陳萬(wàn)春, 張曙光. 航空飛行器飛行動(dòng)力學(xué)[M]. 北京航空航天大學(xué)出版社, 2005.
[8]孫海生. 飛行器低速大迎角動(dòng)穩(wěn)定性風(fēng)洞試驗(yàn)技術(shù)研究[D]. 西北工業(yè)大學(xué), 2003.
[9]馬軍, 姜裕標(biāo), 祝明紅, 等. Φ5米立式風(fēng)洞旋轉(zhuǎn)天平試驗(yàn)裝置研制[J]. 實(shí)驗(yàn)流體力學(xué). 2012, 26(2): 77-80.
Ma Jun, Jiang Yubiao, Zhu Minghong, et al. Development of the rotary balance system in Φ5m vertical wind tunnel[J]. Journal of Experiments in Fluid Mechanics, 2012, 26(2): 77-80.
[10] 郭林亮. 某型飛機(jī)第二期旋轉(zhuǎn)天平試驗(yàn)006-1103試驗(yàn)報(bào)告[R]. 中國(guó)空氣動(dòng)力研究與發(fā)展中心低速所, 2012.
作者簡(jiǎn)介:

吳金華(1989-),男,江西景德鎮(zhèn)人,助理工程師,碩士研究生。研究方向:非定常空氣動(dòng)力學(xué)。通信地址:四川綿陽(yáng)空氣動(dòng)力研究與發(fā)展中心(621000)。E-mail: wujinhua1989_2006@126.com。