基于Harris算法的自適應雙極性紅外艦船目標檢測
2014-03-29 02:10:02陳咸志羅鎮寶金代中胡俊杰
激光與紅外 2014年12期
關鍵詞:檢測
徐 倩,陳咸志,羅鎮寶,金代中,胡俊杰,曲 銳
(西南技術物理研究所,四川 成都610041)
1 引言
海空背景下紅外艦船目標檢測技術是對海偵查、監測等應用領域研究的重點,有效的紅外艦船目標檢測為后續的識別與跟蹤提供了重要基礎。受艦船目標輻射特性的影響,紅外艦船目標成像表現出多極性,即目標灰度高于或低于背景灰度,或部分高于而另一部分低于背景灰度,另一方面受傳感器噪聲、海面輻射、天空熱輻射以及作用距離遠等因素的影響,艦船目標在圖像中表現出對比度低、信噪比低,特別是在背景中存在有非平穩雜波干擾的情況時,目標可能被雜波淹沒,使得紅外艦船目標的有效檢測成為一個極具挑戰性的問題。
多年來許多學者進行了相關研究:文獻[1]建立艦船輪廓模型定位目標感興趣區域,但建立的模型與實際艦船很難達到一致,檢測效果較差。文獻[2]首先提取海天線確定目標感興趣區域,再利用行列均值自適應閾值分割出艦船目標。該算法在不存在海天線的情況下會發生誤檢,且不適用于目標亮度低于背景的場景。文獻[3]對圖像建立區域連接圖,采用最小生成樹方法得到分類結果。該算法在目標灰度分布不均勻時不能有效檢測出目標。
已有算法大多基于艦船目標灰度高于背景灰度能量(即已知目標能量強度高于背景的關系)或艦船目標成像灰度均勻的假設。實際應用中,艦船目標成像不僅可能呈現出目標灰度高于或低于背景,即雙極性,還可能呈現出多極性,即目標區域內部部分區域灰度高于背景,而其他部分區域灰度低于背景。如圖1所示為已有方法對灰度雙極性或多極性艦船目標的檢測結果,可見當目標灰度低于背景灰度(圖1(a))和灰度呈現多極性(圖1(b),圖1(c))時,已有方法不能準確檢測出艦船目標。
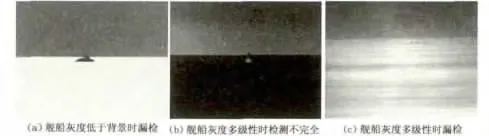
圖1 傳統算法對某些典型紅外艦船圖像檢測結果
針對現有方法在艦船目標成像灰度呈現“雙極性”或多極性的情況下適應能力不足,本文提出了一種新的紅外艦船目標檢測方法。首先對原始紅外圖像進行均值漂移濾波去掉一部分雜波干擾;再對濾波后圖像進行行垂直方向梯度投影提取感興趣區域;然后在感興趣區域提取角點,得到艦船目標的大致區域,最后優化檢測窗口得到完整目標。實驗表明該方法能夠在艦船目標呈現雙極性或多級性的情況下獲得較好的檢測結果。
2 基于均值漂移的圖像濾波
均值漂移算法(Mean Shift)在圖像平滑和圖像分割中都得到了很好的應用[4]。均值漂移模型可以實現圖像的不連續保持性濾波,不僅可以濾除圖像中的噪聲信息,而且能夠自適應地減小局部結構中顯著邊緣信息的平滑。基于前述優點,均值漂移濾波能夠有效濾除海面雜波干擾的同時不損失艦船目標的邊緣信息,有利于后續目標角點的提取。
均值漂移算法是采用迭代計算的方式,即先算出當前點的偏移均值,移動該點到其偏移均值,然后以此為新的起始點,繼續移動,直到滿足一定條件結束迭代計算。該算法自應用到圖像處理中以來,針對不同應用,出現了多種偏移均值的表達形式[4-6],文中采用定義形式[5],偏移均值表示為:
其中,G(x)是一核函數;w(xi)≥0是一個賦給采樣點xi的權重;h為一常數。給定初始點、核函數和容許誤差均值漂移算法循環的執行下面兩步,直至結束條件滿足:
(1)計算mh(x);
文中將紅外艦船目標的空間信息和灰度信息統一考慮,組成特征向量x=(xs,xr),xs表示坐標,xr表示該坐標上對應的灰度特征,并采用高斯核函數估計x的分布,其表達形式如下:

式中,g(x)為高斯核函數的剖面函數;hs、hr為控制著圖像濾波平滑度的特定參數;C為一保證Ghs,hr的積分為1的正數;則Ghs,hr為估計灰度及空間信息分布的兩高斯核函數的剖面函數復合而成的核函數。
分別用xi和zi,i=1,…,n表示原始和平滑后的圖像,用yi,j來表示第i點使用核Ghs,hr在均值漂移過程中第j次迭代的位置,由式(1)、(2)可表示為:
由均值漂移算法原理,用均值漂移算法對每一個像素點xi=(xis,xir)進行如下步驟:
1)初始化j=1,并且使yi,1=xi;
2)運用均值漂移算法計算yi,j+1,直到收斂,記收斂后的值為yi,c;
考慮到處理時間和處理效果,通過大量試驗得到經驗值hs=4,hr=8,可以獲得比較好的濾波效果,如圖2所示,其中(a)為原始圖像,(b)為運用均值濾波算法對圖(a)濾波結果,可以看出均值濾波在保持艦船目標邊緣及內部灰度特性時消除了大量海面雜波及天空云層干擾。
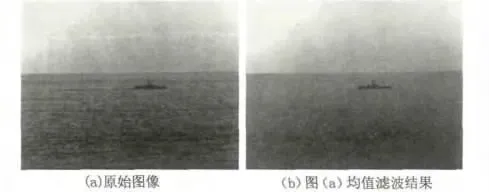
圖2 均值濾波結果
3 基于梯度特征的感興趣區域提取方法
本文針對天空云層較少海面無強魚鱗光的場景,對成像面積具有一定大小(大于10×10像素,艦船高度不超過圖像高度的1/4)的雙極性或多級性艦船目標進行檢測。
提取艦船目標感興趣區域的傳統做法是提取海天線[7],這在海天線模糊或不存在海天線情況下容易發生誤檢。當存在海天線時,艦船一般出現在海天線附近(如圖1所示),由于天空和海面存在熱輻射差,在海天線過渡區域圖像垂直方向梯度變化大;當不存在海天線時,由于艦船大多呈扁平狀、存在吃水線以及艦船附近水紋多出現水平分布,在艦船附近垂直方向梯度變化也較明顯。因此無論是否存在海天線,艦船附近區域垂直方向梯度都會有較大變化。
由于天空背景灰度分布比較均勻而海面雜波干擾比較強,可以通過檢測第一個垂直方向梯度變化較大的行再上下進行行擴展來初步定位艦船區域。圖3是圖1(c)行垂直方向梯度均值投影圖。
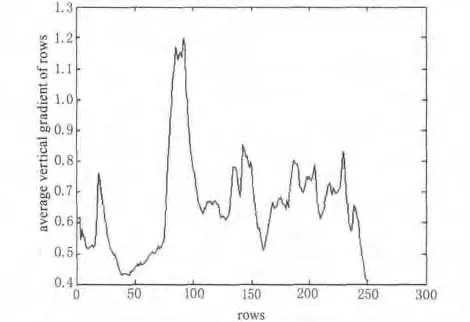
圖3 圖1(c)行垂直方向梯度均值投影
設圖像尺寸為M×N,(i,j)是二維數字圖像平面上的點,f(i,j)是經均值濾波后圖像各點的灰度值,綜合以上分析,可以得出感興趣區域(ROI)提取方法,步驟如下:
1)將圖像與垂直向梯度算子[-1;0;0;0;1]相卷,得到垂直向梯度Iy(i,j),并記錄于長度為M×N的數組中;
2)垂直向梯度取絕對值,計算各行行梯度均值,為進一步消除雜波干擾,取相鄰三行平均值作為各行行均值,得到行垂直方向梯度均值投影Avg_Iy(j),j=0,1,…,M-1,并記錄于長度為M的數組中;
3)設定行垂直方向梯度均值閾值th1,通過大量實驗得到經驗值:
ROI獲取流程圖如圖4所示,圖5給出了存在海天線和不存在海天線兩種場景下ROI提取結果。
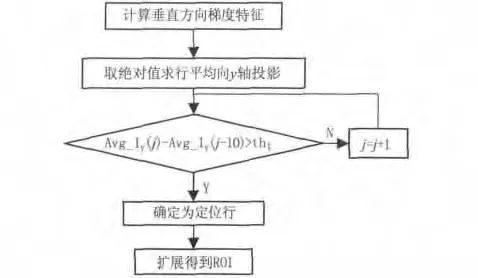
圖4 ROI獲取流程圖
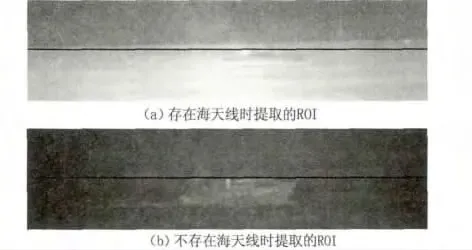
圖5 典型場景下提取的艦船ROI(直線為定位行)
4 基于Harris算法的艦船目標檢測
Harris算法是基于圖像灰度的角點檢測算法,若像素點所在位置的x方向梯度與y方向梯度的絕對值均比較大,則將該像素點判定為角點[8]。根據前面的分析,雙極性艦船邊緣及內部在各個方向梯度都有明顯變化,因此可以通過檢測ROI中紅外艦船目標的Harris角點來實現艦船目標檢測。
對于圖像I(x,y),在點(x,y)處平移(Δx,Δy)后的自相似性可以通過自相關函數來表示,自相關函數可以近似為二次項函數:
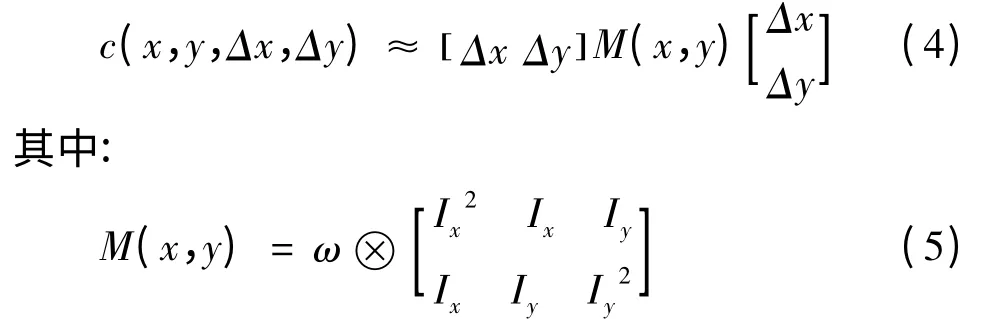
ω為高斯加權系數;Ix,Iy為原圖在x和y兩個方向的一階梯度。
當二次項函數兩個特征值都大且近似相等時此點為角點。由于求取特征值計算量較大,故定義響應函數:

式中,det M為矩陣M(x,y)的行列式;trace M為矩陣M(x,y)的跡,α取值一般為0.04~0.06,本文α取0.06。R值與特征值大小有關,當R值為局部最大值時,即為角點。
若直接尋找R值的局部最大值點,由于海面雜波的干擾會得到很多角點,幾乎占據整個窗口,因此考慮先抑制一部分雜波角點響應值再尋找R值的局部最大值點。由于雙極性艦船與背景灰度差異大,多級性艦船內部部分與部分之間存在灰度差異,因此在艦船邊緣及內部區域會檢測出大量具有大響應值的密集角點,可以通過去掉弱響應值以抑制部分雜波角點,通過大量實驗得到,抑制閾值設置為R最大值的0.008可以消除大部分雜波角點。對抑制后的R值尋找局部最大值即得初步檢測角點。
在初步檢測角點中仍會存在少量響應值很大的雜波角點,由于艦船目標角點的密集性使得雜波角點表現出奇異性,因此對初步檢測角點x坐標值做統計,計算其均值和方差,去掉距均值2倍方差的奇異角點,得到最終檢測角點。圖6給出了角點檢測流程圖。
根據最終檢測角點在ROI區域中畫出矩形框使得其剛好包圍所有的角點。圖7給出了圖1(c)ROI中艦船目標檢測過程圖,“+”號為檢測出的角點位置,矩形框為初步檢測結果。
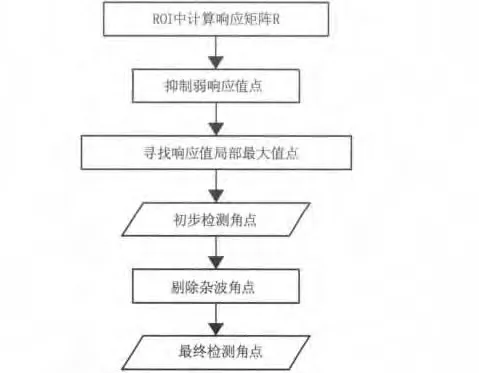
圖6 角點檢測流程圖
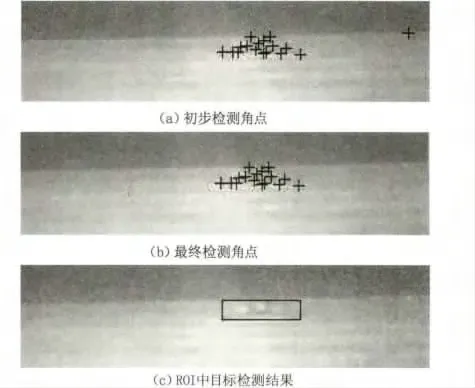
圖7 ROI中艦船目標檢測過程
5 目標檢測窗口優化
在檢測角點過程中雖然抑制了雜波,但同時可能損失一部分目標角點,使得檢測窗口比真實目標略小;同時由于艦船煙囪成像一般為一條豎直線,有時檢測不出角點,使得檢測窗口高度比真實目標略低,因此需對檢測窗口進一步優化。
由于艦船各個方向梯度都較大,可以將已有檢測窗口沿各個方向逐步擴展,每擴展一次計算擴展后梯度均值與上次窗口梯度均值的比值,與給定閾值作比較,大于閾值則繼續擴展,小于閾值則停止。經實驗驗證,水平方向閾值設置為0.95,垂直方向閾值設置為0.995可以獲得較完整的目標窗口。
6 實驗結果與分析
采用文中提出的艦船目標檢測方法,對實際拍攝的雙極性和多級性紅外艦船圖像進行了實驗,圖像大小為320×254,檢測結果均用黑色矩形框標出如圖8所示。其中(a)和(d)中艦船區域灰度高于背景,(b)和(e)中艦船區域灰度低于背景,而(c)和(f)中艦船區域灰度分布不均勻,從圖中可以看出,本文算法均能大致檢測出紅外艦船目標。
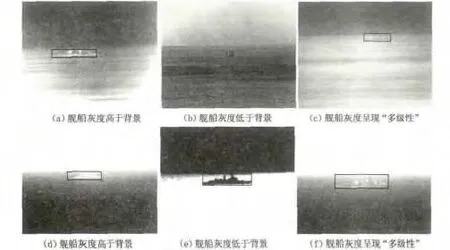
圖8 某些典型場景下雙極性和多級性艦船目標檢測結果
為了驗證算法的魯棒性,對一視頻序列進行了實驗,限于篇幅的原因,僅從序列中選取第1幀、第173幀以及第450幀圖像進行說明,如圖9所示。在視頻序列中,艦船在垂直和水平方向上均有移動,圖9(c)中天空部分多了一個很大的亮斑干擾,實驗結果表明,本文算法均能夠比較準確的提取紅外艦船目標,算法穩定性較好。
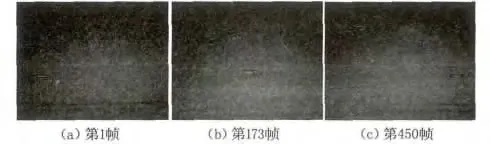
圖9 視頻序列中艦船目標檢測結果
7 結語
針對不同環境和拍攝角度下紅外圖像中艦船目標呈現“雙極性”和“多極性”的問題,本文提出了一種新的基于梯度信息和Harris角點檢測的紅外艦船目標檢測算法。首先對圖像進行均值漂移濾波以抑制雜波干擾,在此基礎上,利用圖像的梯度特征獲得感興趣區域(ROI),很好地解決了不存在海天線和海天線模糊時艦船目標檢測的難題,隨后通過自適應設置Harris算法閾值并去掉雜波角點,實現艦船目標的自動檢測,為后續的目標識別和跟蹤創造了有利條件。然而需要指出的是,文中算法并不適應任何情況,當海面有強魚鱗光反射和天空有較多云層時,檢測算法也有發生誤檢的風險,這些都是今后需要進一步完善和提高的地方。
[1] YAN Fabao,ZOU Changwen,WANG Lu,et al.Infrared warship target detection based on SUSAN algorithm and segmentation algorithm using the mean of image rows and colums[J].Laser&Infrared,2011,41(3):324-327.(in Chinese)嚴發寶,鄒常文,王璐,等.基于SUSAN算法和行列均值分割的海面艦船檢測[J].激光與紅外,2011,41(3):324-327.
[2] YANG Mingyue,YANG Weiping.Automatic detection method of IR warship target in the complex sea-sky background[J].Infrared and Laser Engineering,2008,37(4):638-641.(in Chinese)楊明月,楊衛平.復雜海天背景下紅外艦船目標的自動檢測方法[J].紅外與激光工程,2008,37(4):638-641.
[3] TAO Wenbing,JIN Hai.Ship infrared object segmentation based on mean shift filtering and graph spectral clustering[J].J.Infrared Millim.Waves,2007,26(1):61-64.(in Chinese)陶文兵,金海.基于均值漂移濾波及譜分類的海面艦船紅外目標分割[J].紅外與毫米波學報,2007,26(1):61-64.
[4] Comaniciu D,Meer P.Mean shift:A robust approach toward feature space analysis[J].IEEE Trans.PAMI.2002,24(5):603-619.
[5] Yizong Cheng.Mean shift,mode seeking,and clustering[J].IEEE Trans.PAMI,1995,17(8):790-799.
[6] Fashing M,Tomasi C.Mean shift is a bound optimization[J].IEEE Trans Pattern Anal Mach Intell,2005,27(3):471-474.
[7] GUO Xiaowei,MA Dengwu,DENG Li.Automatic target recognition algorithm for infrared warship under sea-sky background[J].Laser&Infrared,2012,42(12):1398-1402.(in Chinese)郭小威,馬登武,鄧力.海天背景下紅外艦船自動目標識 別 算 法[J].激 光 與 紅 外,2012,42(12):1398-1402.
[8] XU Kehu,WANG Tianzhao,CHEN Jinyu,et al.Harris corner detection algorithm based on self-adapting nonmaximal suppression[J].Science&Technology Review,2013,31(20):35-38.(in Chinese)徐克虎,王天召,陳金玉,等.自適應非最大抑制的Harris角點檢測算法[J].科技導報,2013,31(20):35-38.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
