基于圖像識別技術的南疆紅棗品種識別研究
2014-03-26 11:21:16吳明清李傳峰弋曉康
塔里木大學學報 2014年4期
關鍵詞:特征
吳明清 李傳峰 弋曉康
(塔里木大學機械電氣化工程學院,新疆阿拉爾,843300)
棗(Ziziphus jujbbe Mill)屬鼠李科(Rhamnus)棗屬(ZiziPHus Mill)植物,原產于中國是我國古老的果樹和我國古代著名的“五果之一[1]”。紅棗具有極高的營養保健價值及藥用價值,素有“木本糧食,滋補佳品”的美譽,是集藥、食、補三大功能為一體的保健果品[2]。
自20世紀60年代,新疆喀什地區,阿拉爾墾區從河北、河南、山西等地方引進灰棗,壺瓶棗、園脆棗等進行栽培。21世紀前后新疆南部又大量引進其他一些品種。如:駿棗,冬棗。為了收集不同用途,不同成熟期的優良品種,在新疆溫宿縣建立一個紅棗資源庫[2]。由于紅棗資源非常豐富,樣本多,給鑒評帶來很大的困難,本文采用特征識別和神經網絡結合的方法進行圖像識別系統研究,具有快速、及時、無破壞性多指標同時鑒定等優點,可提高測定的效率,降低鑒別成本,消除任務造作誤差,測定信息更為客觀和真實,為紅棗的品質鑒別提供了理論和技術依據。
1 材料與方法
1.1 材料
試驗紅棗采集于新疆阿拉爾農墾十團某紅棗基地。采集紅棗果實品種有灰棗圖1(a)、雞心棗圖1(b)、金昌棗圖1(c)、駿棗圖1(d)、圓脆棗圖1(e),做為計算機識別目標。樣品采摘時間為2013年11月15日,密封后放入冰箱冷藏備用。
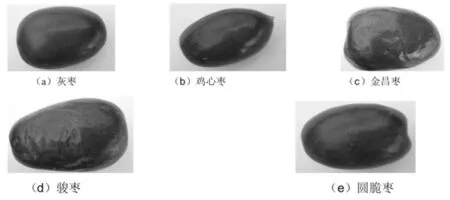
圖1 紅棗品種
2 圖像處理方法
采集時選擇顏色鮮艷,表面光滑,含水充足的5種紅棗果實的150個有代表性紅棗作為試驗樣本放置于OK-AC1300型的攝像頭下圖像采集制成分辨率為3 000*4 000的jpg格式的數字圖像。如圖2(a)為紅棗的一個圖像樣本;對圖像進行處理,主要包括圖像的灰度化,濾波,閥值分割,棗果圖像形態學處理和輪廓提取5個環節。本文以灰棗圖像為例,演示紅棗圖像的預處理過程。圖像處理和特征提取和均采用Matlab 7. 0軟件實現。
2.1 灰度化圖像
采集獲取的紅棗圖像為RGB彩色圖像,需要對該圖像進行灰度化處理。彩色圖像轉化為灰度圖像的公式為Y=R×0. 298 9+ G×0. 587 0+ B×0. 114 1其中,R, G, B別為彩色圖像中像素的紅,綠,藍3個分量,Y是該像素在灰度圖像中的灰度值。因此在圖像去除噪音。采用3X3均值濾波對灰度圖去噪。如圖2(c)所示。
2.2 閥值分割
閥值分割就是把灰度圖像轉化為二值圖像時,需要設定一個閥值,方便對輪廓特征的形狀特征的提取。本試驗采用最大類間方差法(0stu)獲得一個合適的閾值(threshold)把紅棗的灰度圖像轉化為二值圖像[3]。
2.3 形態學處理
在二值化分割工作,發現紅棗表面可能遭受蟲子的侵蝕和失去水分后的褶皺,從而在分割后的紅棗圖像內部存在小的空洞,影響輪廓的提取,因此這部分圖像在二值化后需要進一步處理。為了保護紅棗圖像的形態特征以及邊緣的清晰,采用了數學形態學里的閉運算,即先進行膨脹運算,然后腐蝕運算,這樣就消除了紅棗內部的小孔洞。如圖3所示。
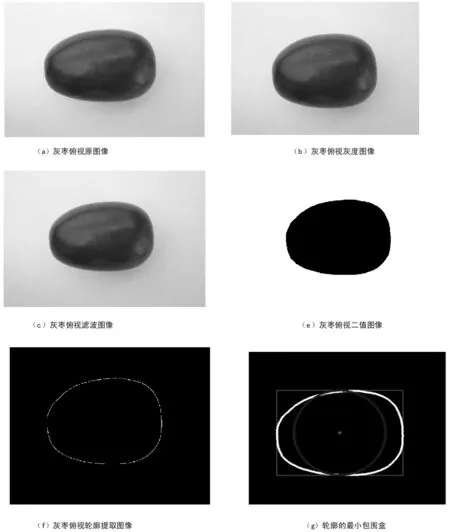
圖2 灰棗俯視圖像預處理
2.4 輪廓的提取
由于紅棗的輪廓是紅棗自身的一個圖像象素子集,而且紅棗輪廓中含有豐富的形態學信息,通過輪廓來計算形態特征計算比較簡單,計算量小。為了紅棗輪廓進行分析,需要對輪廓進行跟蹤,分割后的圖像輪廓像素由0和1組成,1代表輪廓點的像素,對1像素點跟蹤其8個方向的領域,同時采用鏈碼跟蹤輪廓點并進行編碼[4]。 具體跟蹤算法步驟如下:
2.4.1 按照從上到下和從左到右的順序逐次掃描圖像,以第一個像素值1的點定位起始點,如果找不到起始點算為結束。
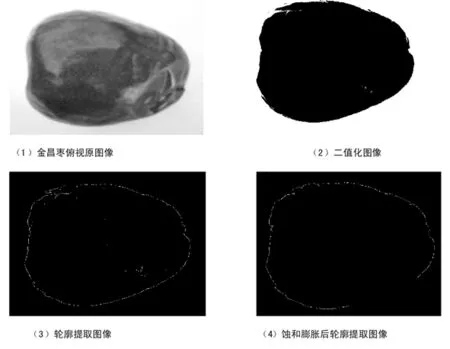
圖3 金昌棗俯視圖像形態學處理
2.4.2 按逆時針順序從當前點右邊開始搜尋器8個方向上的領域點,如果發現未曾搜索過的像素點1,并且該點8個方向的領域點含有0值像素點,則講1值像素點值為當前點,同時記錄下相應的鏈碼值。重復該過程指導找到起始點。
2.4.3 根據所記錄的鏈碼值,采用8個方向弗里曼碼進行編碼,從而獲得輪廓信息。圖2(g)顯示了對圖2(f)中紅棗輪廓胡跟蹤結果。
通常采用紅棗果實特征,比如顏色,大小等區別不同品種,但是紅棗的形狀特征進行紅棗品種的鑒別。根據收集后的五種紅棗來看,不同品種存在很大的差異,即使同一種紅棗有所不同,比如周長、面積、縱軸長,短軸長等。本試驗利用紅棗輪廓計算描述紅棗的形狀絕對特征值,包括紅棗的內接圓,最小包圍盒,外接圓,凸包等。根據文獻[4]中的介紹,特征參量計算可以得到8項相對特征值: 如縱橫軸比、矩形度、面積的凹凸比、周長的凹凸比、球狀性、圓形度、偏心率等。
以上8項幾何特征都具有旋轉、平移和尺度不變性,表1為
Hu[5]提出的7項不變矩也具有天然的旋轉、平移和尺度不變性,在圖像識別領域經常用到,但是僅限于灰度圖像。Chen[6]等人在Hu的基礎上改進其算法,使其能夠適用于輪廓。表2為圖2(a)中灰棗輪廓圖像對其縮小一倍和旋轉90°后的7項Hu不變距特征參數,可以看出,旋轉和縮小后的圖像與原圖像的7項不變矩基本保持不變。
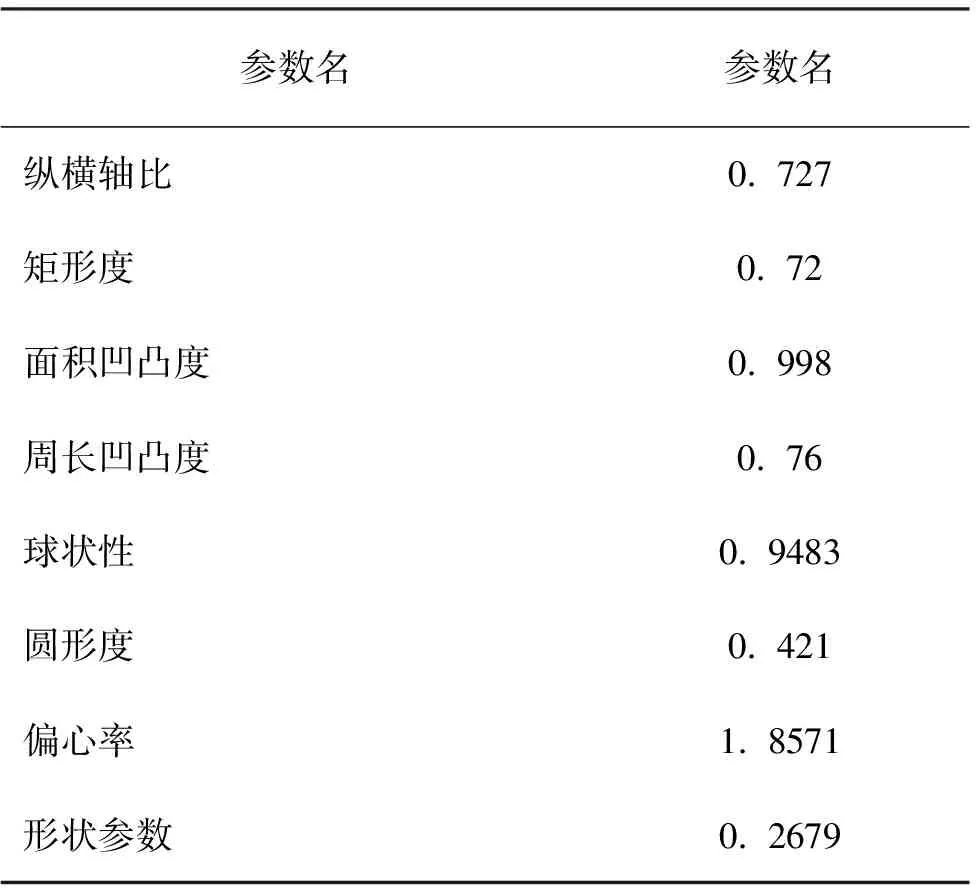
表1 灰棗俯視圖8項幾何特征數值
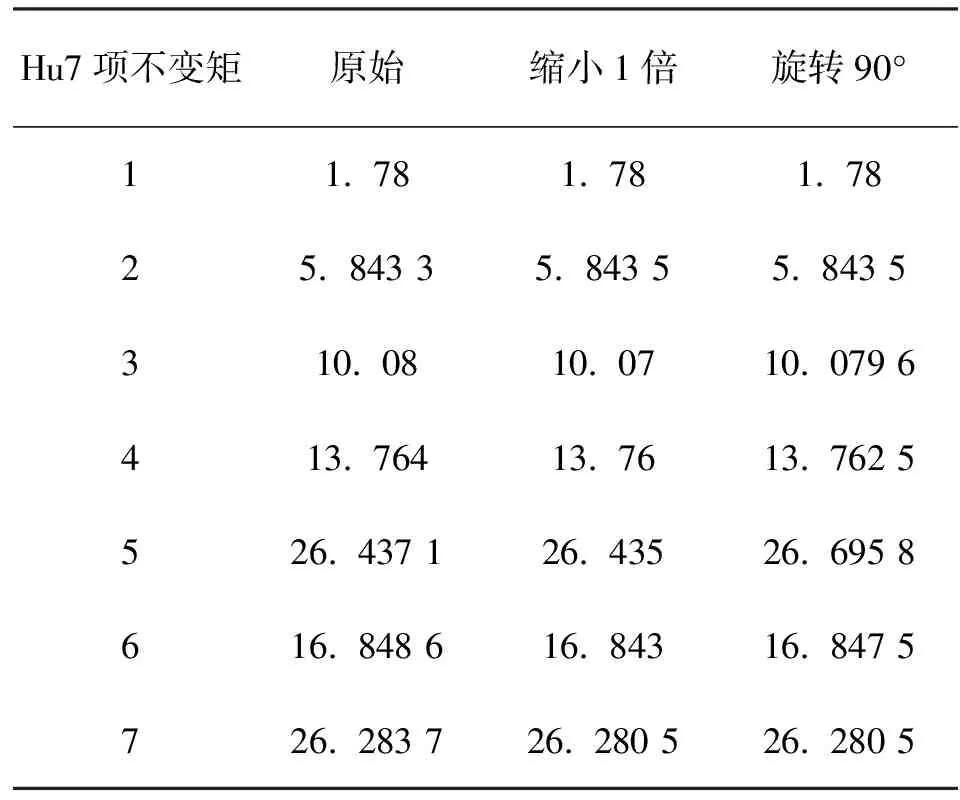
表2 灰棗俯視圖以及縮小旋轉后的Hu特征數值
從上述兩種表格可以看出,紅棗的8項幾何特征和7項Hu不變矩不在同一個數量級上,而且存在較大的差異,因此需要對各項特征進行歸一化處理,采用公式(9)能把個項特征值都歸一化到[0,1]范圍內。
(9)
其中E為特征值,Emax為所有特征值樣本數據中該項特征的最大值,Emin為所有征值樣本數據中該項特征的最小值。
人工神經網絡(artificial neural network,縮寫ANN),簡稱神經網絡(neural network,縮寫NN),是一種模仿生物神經網絡的結構和功能的數學模型或計算模型。神經網絡由大量的人工神經元聯結進行計算。現代神經網絡是一種非線性統計性數據建模工具,常用來對輸入和輸出間復雜的關系進行建模[7]。PNN是專門應用于解決分類問題的人工神經網絡,其主要用基于概率統計思想。由Bayes分類規則構成,采用Parzen窗函數密度估計方法估算條件概率,從而進行分類模式識別[8]。在matlab7.0的PNN神經網絡工具中包含了進行PNN分析和設計的許多函數,如newpnn(P,T,spread)可以快速創建一個神經網絡。該函數使輸入層P的神經元數目和T樣本矢量的維數相等,其節點數目取決于輸入與輸出特征向量的維數。提取紅棗的15項特征值,把它們歸一化后作為表征紅棗品種的向量輸入到神經網絡中,因此輸入層共計有15個節點。輸出層節點數一般為識別的種類數。也可以用輸入的節點的編碼表示。本研究輸出種類5個,對應5個紅棗品種,把輸出設計為阿拉伯數字(如圖2所示)。train(net,P,T)是神經網絡的訓練函數。sim( net, P)神經網絡仿真函數。
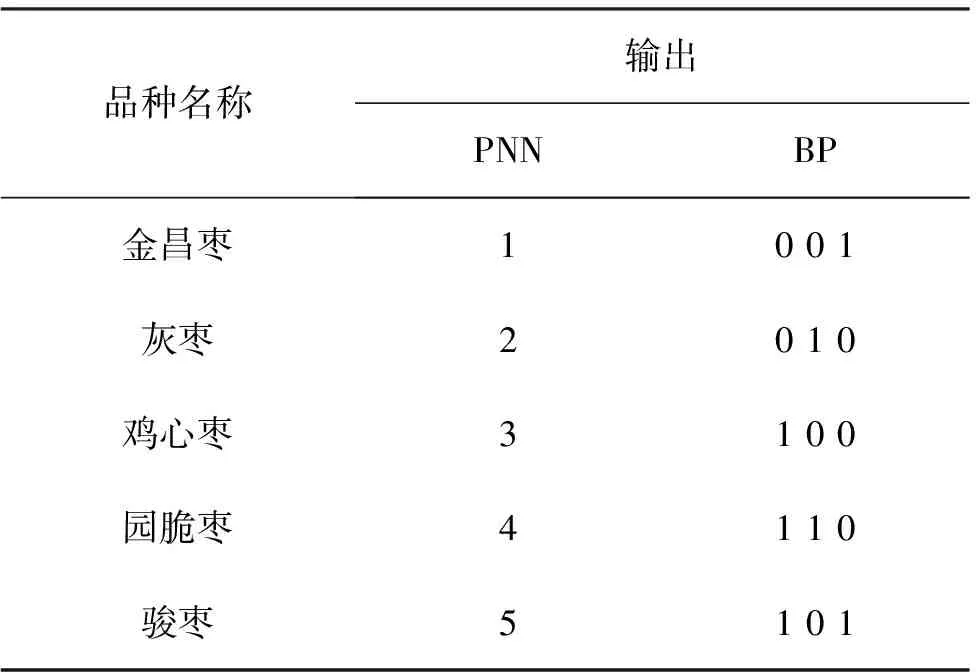
表3 紅棗類別對應的阿拉伯數字輸出值
BP(back Progagation)網絡是目前廣泛的神經網絡模型。該網絡能學習和存貯大量的輸入和輸出模式的映射關系。它的學習規則是使用最速下降法,通過反向傳播來不斷調整網絡的權值和閾值,使網絡的誤差平方和最小。BP神經網絡模型拓撲結構包括輸入層(input)、隱層(hide layer)和輸出層(output layer)。BP神經網絡同樣有15個輸入神經元和5個輸出神經元;中間層的神經元個數為31個,確定隱含層神經元個數為31個。因此,網絡結構為6x31x2。隱含層神經元的傳遞函數采用S型正切函數為tansig,輸出層神經元的傳遞函數采用S型對數函數logsig,網絡的訓練函數采用trainlm。由于輸出層采用的是S型激活函數logsig,輸出永遠不可能達到1或者0,使得BP網絡無法收斂,為了避免問題,用0. 99代替1,用0. 01代替0。利用如下代碼創建符合上述要求的BP網絡。網絡輸出的結果采用編碼輸出如表3所示,BP訓練誤差曲線如圖4所示。
treshold=[01; 01; 01; 01; 01; 01; 01; 01; 01; 01; 01; 01; 01; 01; 01];
net=newff(threshold,[31,3],{'tansig','logsig'},'trainlm');
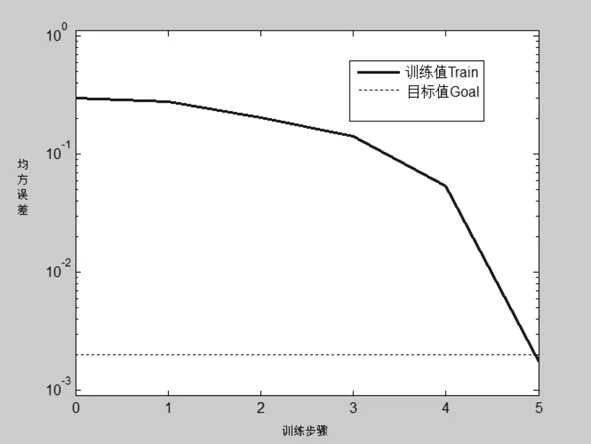
圖4 bp網絡訓練網絡的誤差曲線
2.5 試驗結果與分析
本文應用matlab7.0平臺進行圖像處理,特征提取和神經網絡構建。通過分析5種不同品種類的紅棗,得到30組特征向量,完成了神經網絡的訓練樣本和測試樣本的構建。從5種紅棗中選擇20組作為網絡訓練樣本和10組作為測試樣本。分別應用BP和PNN兩個網絡來訓練特征向量組成的樣本,然后對訓練樣本進行監測。
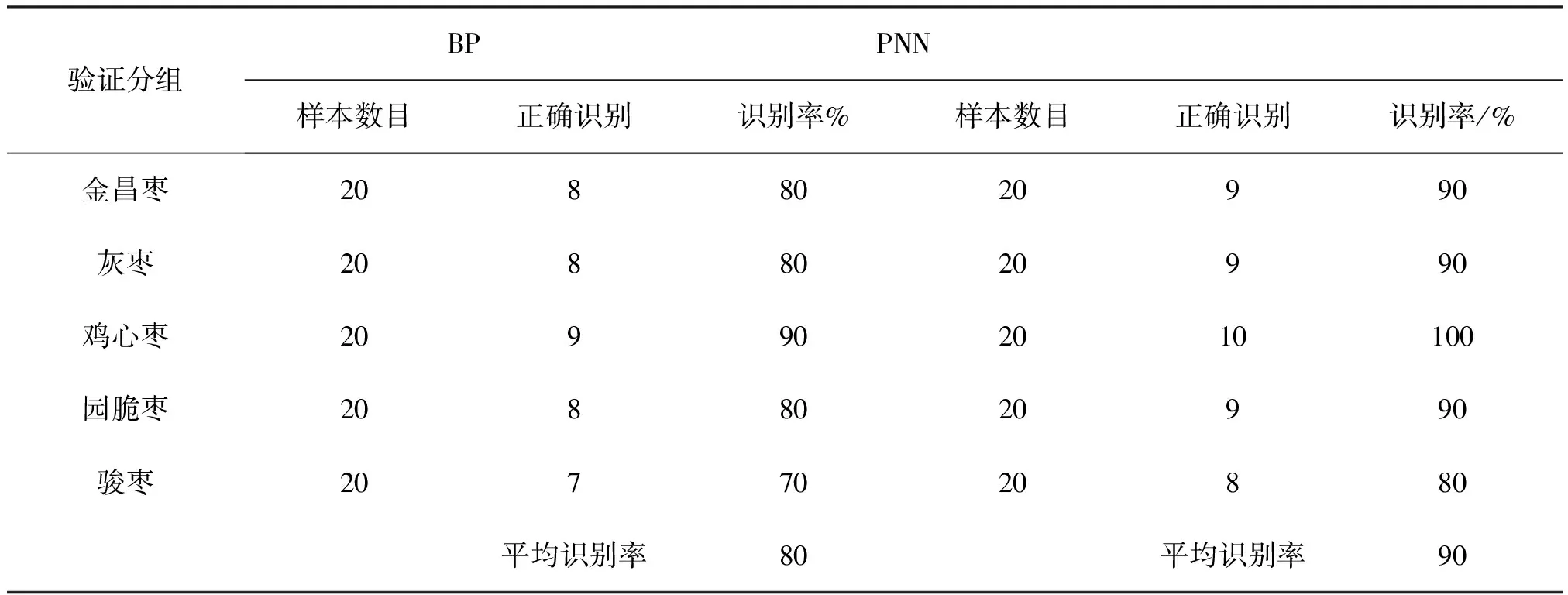
表4 模型識別結果
由表4可見,PNN網絡的識別率高于BP,其原因是PNN采用了Parzen 函數密度估計方法估算條件概率,只考慮樣本空間的概率特性,允許增加訓練樣,本而無需重新進行長時間的訓練。從整個網絡的訓練來看,PNN網絡比BP網絡收斂速度快,因此在該試驗中分類效果較好。
3 總結
對不同品種紅棗輪廓外形特征,進行PNN神經網絡和BP神經網絡識別的試驗,表明兩種神經網絡作為紅棗品種的分類識別器可行進行識別,PNN神經網絡要比PN神經網絡更高的識別率。
由于單純的采用了形狀特征作為分類的依據,有些紅棗品種之間相似度很大,不能很好的識別,因此,在以后的識別中應該抓住不同紅棗的局部特征提高紅棗的識別率。此外在今后研究中應該增加更多的紅棗品種,為實現紅棗智能化識別做好準備。
[1] 劉孟軍,汪民.中國棗種質資源[M].北京:中國林業出版社,2009.
[2] 郭玲,周慧杰,羅華平.新疆紅棗引種成效與其潛在性危機及防控措施[M]. 北方園藝,2013(11):194-196.
[3] otsu N.A Threshold Selection Method form Gray Level Histogram[J].IEEE Trans.on Syst.Man,Cybern.1979,9(1)62-66.
[4] 王曉峰,黃德雙.葉片圖像特征提取與識別技術的研究[J].計算機工程與應用,2006( 3) : 191-192.
[5] Hu M K. Visual Pattern Recognition by Moment Invariants[J].IRE Transaction Information Theory, 1962, 8(2):179-187.
[6] Chen C C. Improved Moment Invariants for Shape Discrimination[J],Pattern Recognition, 1993, 26( 5):683-686.
[7] 馮全,邵新慶,王贊文.基于BP網絡的典型草原群落自然演替預測模型研究[J].草地學報,2008, 16( 3):252-255.
[8] 賀鵬,黃林. 植物葉片特征提取及識別[J]. 農機化研究,2008(6):168-199.
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38
