基于彩色同心圓的投影儀標定算法
2014-03-16 09:23:26嚴永財
電子設計工程 2014年10期
嚴永財,李 燕
(暨南大學 信息科學與技術學院,廣東 廣州 510640)
基于結構光編碼技術的主動視覺系統與傳統的立體視覺系統的區別在于,主動視覺系統至少包含一臺向場景投射編碼結構光的投影儀和一臺采集場景圖像的攝像機。投影儀的存在使主動視覺系統可以控制特征點的鄰域信息以標識特征點,從而解決了傳統視覺系統特征點匹配的問題。目前,關于主動視覺系統的研究已漸漸深入,且已經廣泛應用于互動娛樂、工業測量、機器人視覺等領域。在運用主動視覺系統進行三維重建之前,必須對攝像機和投影儀進行標定,而且標定結果直接影響三維重建的精度。
攝像機標定算法的研究起步較早,已經發展得比較成熟,其中基于平面的標定算法由于其較高的標定精度和簡單的標定操作得到了廣泛的應用,常用的有Z.Zhang的棋盤格算法、G.Jiang的基于同心圓算法、Tsai標定法。而對于投影儀的平面標定算法,通常是求出標定板與投影圖像的點對應關系,然后用類似相機標定的方法來標定投影儀[1-5]。其中一類方法事先標定攝像機[1],通過反投影來求解投影到場景的特征點的三維坐標,用此類方法,投影儀的標定精度會受攝像機標定精度的制約;另一類方法不事先標定攝像機,S.Zhang等[2]運用正弦光柵投影,通過求垂直和水平兩個方向的相位來得到標定平面上的固有特征點在投影圖像中的對應點;孫勇等[3]將投影圖像和標定板圖案設置為一模一樣的棋盤格,將兩者在相機中的成像對正,來間接求解投影圖像與標定平面間的單應;D.Moreno等[4]提出投影高密度的編碼結構光給標定平面的固有特征點在投影圖像中的對應點定位的方法。本文提出基于彩色同心圓的投影儀標定算法不需要事先標定攝像機,也不必像其他既有的標定算法那樣需要求出投影圖像與標定板之間的單應,其最大優勢在于操作和處理的簡易性和結果精確度的兼顧。
基于彩色同心圓的投影儀標定需要固定投影儀和攝像機,用投影儀向一個畫有一組青色同心圓的標定平面投影黃色洋紅色相間的棋盤格圖像,攝像機采集場景圖像;在預處理中利用RGB通道過濾方法分離圖像中的同心圓和棋盤格分量;分析棋盤格分量可以得到投影圖像和攝像機圖像關于標定平面的單應矩陣Hcp;分析同心圓分量結合上一步得到的Hcp可以求標定平面Circular Points在投影圖像中的對應點;用這些對應點擬合的圓錐曲線可以求出投影儀的內參數矩陣。此方法不僅簡化了主動視覺系統的標定過程,而且獲得理想的標定精度。
1 投影儀標定
1.1 投影儀模型及坐標系定義
投影儀可以看成投影方向相反的攝像機,用針孔相機模型來描述投影儀。XP是投影圖像中特征點的齊次坐標,X是Xp將投影到標定板上得到的對應點齊次坐標,則有,

其中 Pproj=Kp[R][T]為 3×4的投影矩陣,R、T分別是世界坐標系相對投影儀坐標系的旋轉矩陣和位移向量,Kp是投影儀內部參數矩陣,

其中 fu、fv分別是投影儀 u、v方向的焦距,s是傾斜參數,(u0,v0)是投影儀的主點(Principal Point)。
標定系統的坐標系定義如圖1所示。
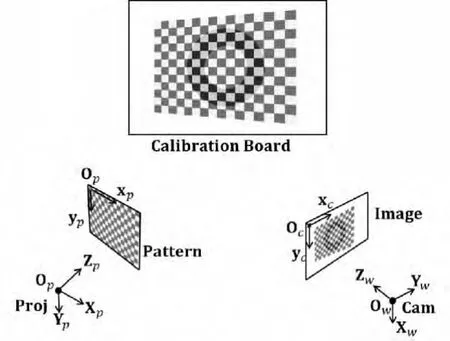
圖1 坐標系定義Fig.1 The definitions of the coordinate systems
世界坐標系OwXwYwZw定義為與攝像機坐標系重合,即OwXwYw與攝像機圖像平面平行且Zw垂直于攝像機圖像平面。投影儀坐標系定義OpXpYpZp與攝像機坐標系定義類似。
1.2 同心圓的秩1約束和秩2約束
本文投影儀內參數矩陣求解過程以及圖像預處理中同心圓分量的邊緣篩選,都運用到同心圓投影變換前后均滿足的約束[8]:秩1約束和秩2約束。
對于已知同心圓C1、C2,其對偶圓錐曲線的線性組合為C′*=λ1C1-1+λ2C2-1, 當 C′*滿秩時,C′*與 C1、C2同心的圓 C′的對偶圓錐曲線;當C′*的秩為1,C′*是圓心c的對偶圓錐曲線;當 C′*的秩為 2,C′*是同心圓所在平面的 Circular Points I、J的對偶圓錐曲線。C1、C2經過投影變換 H變換為 Q1、Q2,當Q′*=λ3Q1-1+λ4Q2-1的秩為 1, 此時的 Q′*為 Q1、Q2的秩 1 約束,記為

Δ1實際上是C1、C2的圓心在Q1、Q2所在平面上的對應點的對偶圓錐曲線,當 Q′*的秩為 2 時,此時的 Q′*為 Q1、Q2的秩2約束,記為

Δ2是 C1、C2所在平面的 Circular Points 在 Q1、Q2所在平面上的對應點的對偶圓錐曲線。對Δ2奇異值分解可以得到I′、J′
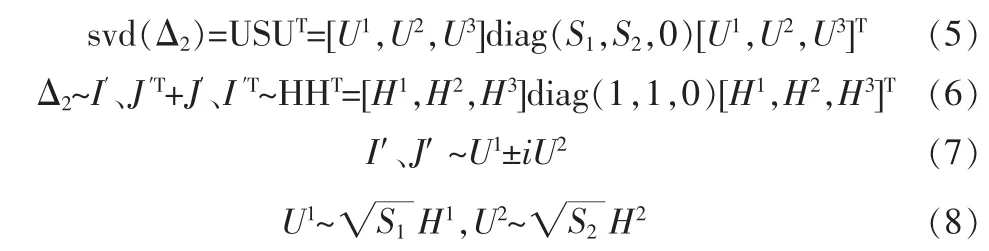
由公式(7)(8)可知,由兩平面的單應矩陣可以求出其中一個平面的Circular Points在另一個平面上的對應點,但是用一組同心圓映射得到Δ2的奇異值分解只能得到的 I′、J′的位置,而不能得到 I′、J′與 I、J的對應關系。
如果已知Q1、Q2是一組同心圓的投影,則Δ1、Δ2可以通過廣義特征值分解得到。Q1、Q2的廣義特征值有3個α、α、β,α是重解,則

1.3 投影儀標定原理
基于彩色同心圓的投影儀標定算法關鍵是用同心圓投影變換前后需滿足的秩2約束求標定平面的Circular Points在投影圖像中的對應點和用對應點擬合圓錐曲線求出投影儀內參數矩陣。
秩2約束是分析采集圖像的同心圓分量和棋盤格分量得到的。分析棋盤格分量,用DLT算法可以求攝像機圖像到投影儀圖像的單應矩陣Hcp;由同心圓分量可以得到標定平面的 Circular Points Iw、Jw的成像 Iwc、Jwc,則 Iw、Jw在投影圖像中的對應點Iwp、Jwp分別為:

變更標定平面的方位采集3幅以上圖像得到3組以上Iwp、Jwp即可擬合出Absolute Conic在投影平面上的對應圓錐曲線 ωp。
用ωp可以求投影儀的內部參數矩陣Kp。假設投影圖像中的一點Xp,在三維場景的無窮遠處有唯一的對應點X∞,X∞在無窮遠平面上 π∞=[0,0,0.1]T,則

其中,X?∞可以看作Xp在無窮遠平面上的投影點在無窮遠平面坐標系(無窮遠平面坐標系中齊次坐標X?∞,與世界坐標系的X∞對應)中的齊次坐標,H∞是π∞到投影圖像的單應矩陣。在無窮遠平面坐標系下,Absolute Conic可以表示為單位矩陣I,則Absolute Conic在投影圖像中的對應圓錐曲線為

因此,對ωp進行Cholesky分解可得Kp-1。
1.4 采集圖像的預處理
由于采集的圖像棋盤格分量和同心圓分量交織在一起,因此在執行2.2的標定過程之前,必須對采集圖像預處理以分離兩個分量。標定板的彩色同心圓如圖2(a)所示,將棋盤格投影到標定板上,攝像機采集的圖像如圖2(b)所示。青色的同心圓與黃色棋盤格重合位置變成綠色,與洋紅色棋盤格重合位置變成藍色,預處理步驟如下:
1)通過紅色通道并用Canny算子邊緣檢測得到如圖2(c)的邊緣圖;
2)提取出滿足秩2約束的兩條邊緣,標記為同心圓邊緣,從而分離出同心圓分量為圖2(d)中的高亮部分;
3)綜合綠色通道和藍色通道圖像后,由于系統的色彩還原度較差,殘余的同心圓分量仍會影響棋盤格角點的提取,進一步進行直方圖均衡化,得到圖2(e);
4)對圖2(e)自適應閾值分割后得到的棋盤格分量如圖2(f);
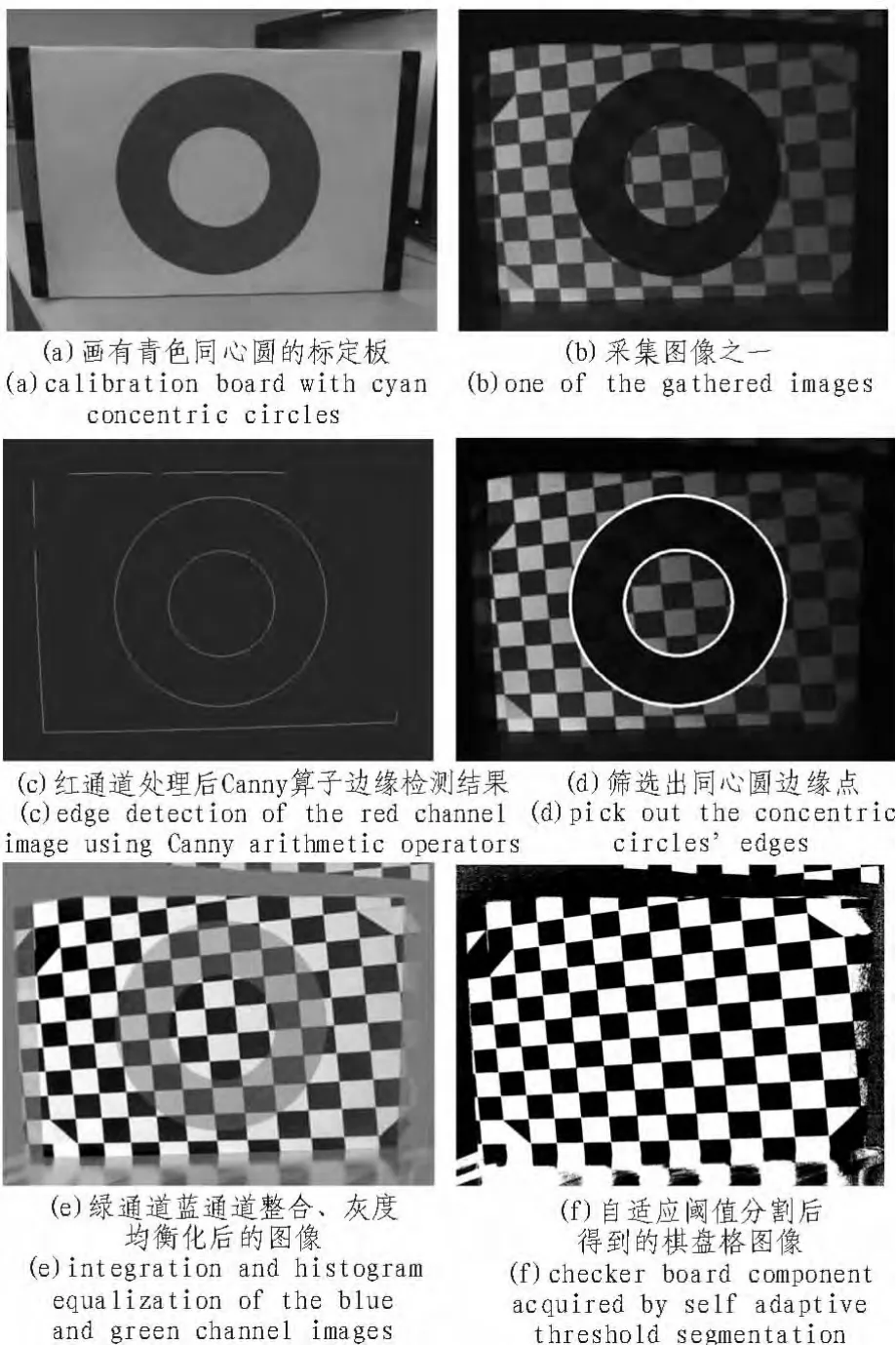
圖2 采集圖像的預處理過程Fig.2 The preprocessing of the gathered images
1.5 同心圓標定算法的主要流程
1)對采集圖像預處理,分離同心圓分量和棋盤格分量;
2)由同心圓分量計算 Iwci、Jwci(i=1,2,…,n)(可標定攝像機內參數 Kc);
3)由棋盤格分量,求關于種朝向的標定平面的 Hcp1、Hcp2、…、Hcpn;
4)利用公式(11)(12)求出 Iw、Jw在投影圖像中的組對應點 Iwpi、Jwpi(i=1,2,…,n);
5)用最小二乘法擬合出Absolute Conic在投影圖像中的對應圓錐曲線ωp;
6)對ωp進行Cholesky分解得到Kp-1,求逆矩陣得到投影儀內參數矩陣Kp。
2 實驗與數據
搭建一個主動視覺系統,通過對投影點的三維重建來分析投影儀標定算法的精度。重建之前需要標定攝像機和投影儀,用采集圖像的同心圓分量來標定攝像機。投影儀采用Sony VPL CX21 3LCD投影儀,分辨率為1 024×768;攝像機采用MicroVision MV3000FC彩色CCD數字相機,分辨率為2 048×1 536;投影圖像為品紅色、黃色相間的棋盤格,有效區域為靠近中心的的區域;標定板上畫有一組內外半徑分別為12.5 cm和25 cm的青色同心圓。
由于一個標定板朝向只需采集一幅圖像,故圖像采集過程十分簡單,不需要特殊器械來固定標定板。操作過程為:固定好投影儀和攝像機;投影儀向畫有青色同心圓的標定板投射黃色洋紅色相間的棋盤格;攝像機采集圖像;重復改變標定板位置和采集圖像這2個步驟直到采集到3幅以上的圖像。
實驗將攝像機和投影儀中心距離定為500 mm,執行2.4所述的步驟標定出投影的內部參數矩陣如表1所示。通過重建2 926個點 (此時重建點到攝像機投影儀的平均距離約為1 200mm),用重建點到擬合平面的距離來衡量內參數的精度。實驗中重建點偏移擬合平面的距離如圖3所示。重建點到擬合平面的平均距離為0.634 4mm,偏移距離的均方根為0.794 3mm。
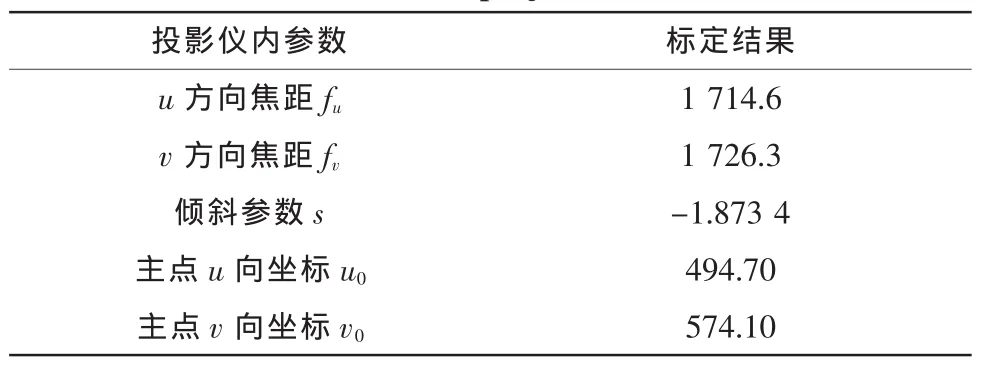
表1 投影儀標定結果Tab.1 Results of projector calibration
由以上的誤差分析可知,基于彩色同心圓的標定算法不是追求最高的標定精度,其精度相對于那些基于結構光編碼的標定方法[6]尚有一定的差距,但是已經能與現有的許多方法[7]的相當。此方法利用了同心圓圖案特征容易提取且與投影儀內參數矩陣相關性高的特點,并充分利用標定圖案的顏色空間,使其具備其他標定算法所不具有的便利性。最少只需3幅圖像便可以標定投影儀及攝像機,比精度相近的算法[5,7]平均少采集一半圖像;標定板在一個位置只需要采集一個圖像,故不需要其他器具輔助,僅需徒手固定標定平面。
3 結束語
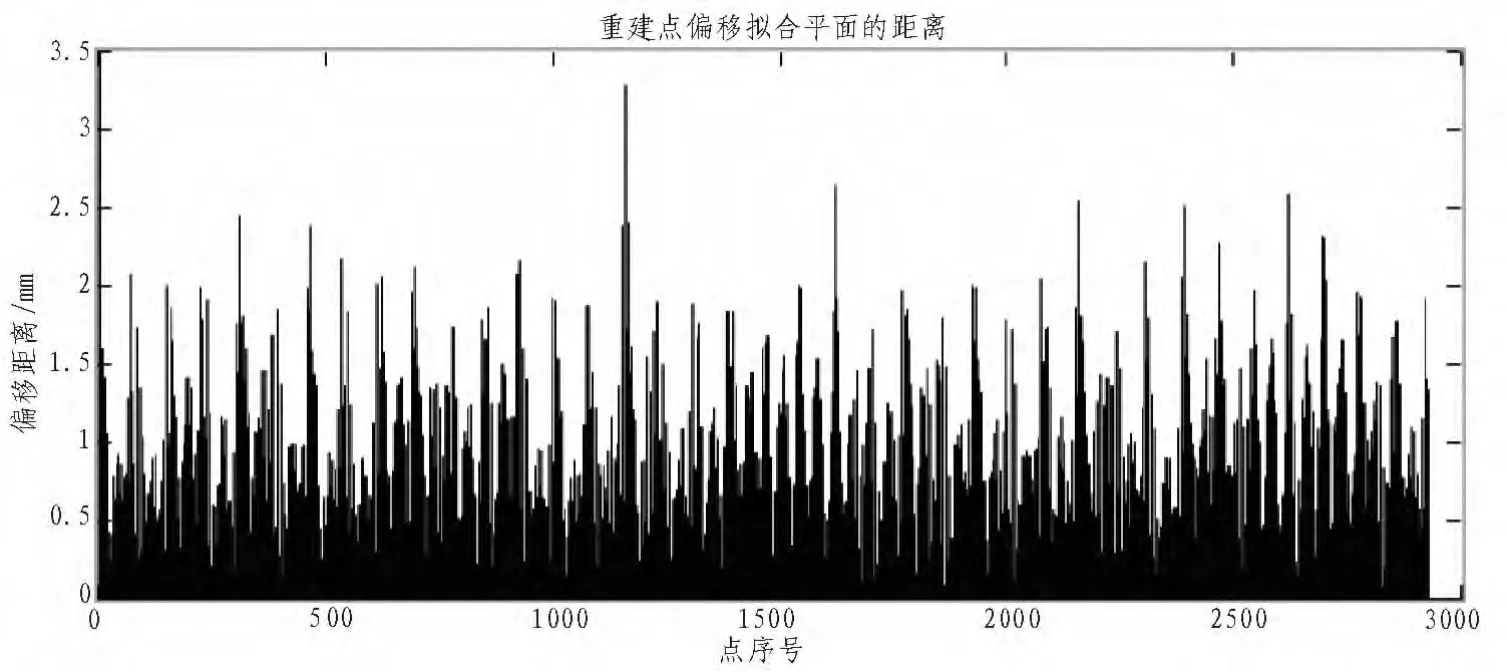
圖3 重建點相對擬合平面的偏移Fig.3 Distance between reconstructed points and fitting planes
基于彩色同心圓的投影儀標定算法有效利用簡單的同心圓及棋盤格成像所提供數據,求攝像機圖像和投影圖像間的單應矩陣結合同心圓的秩2約束完成投影儀的內參數標定。此外,本文還將傳統方法中標定攝像機和標定投影儀的兩個圖像整合到一個彩色圖像中,不僅減少了圖像采集量,還省去了標定板一個朝向需采集兩幅圖像的繁瑣操作,大大簡化了投影儀標定過程,最重要的是其標定精度仍然十分可觀。
[1]Fernandez S,Salvi J.Planar-based camera-projector calibration[C]//The 7th International Symposium on Image and Signal Processing and Analysis,2011.
[2]Zhang S,Huang PS.Novelmethod for structured light system calibration[J].Optical Engineering,2006,45(8):83601.
[3]Sun Y,Li Y,Wang Q,et al.Calibration of the Structured LightSystem Based on Active Projection[C]//Proceedingsof the 30th Chinese Control Conference,2011:22-24.
[4]Moreno D,Taubin G.Simple,Accurate,and Robust Projector-Camera Calibration[C]//Second Joint3DIM/3DPVTConference:3D Imaging,Modeling,Processing,Visualization&Transmission,2012.
[5]張東,唐立新.基于彩色圓形標記投射的投影儀標定方法[J].計算機與數字工程,2011,39(4):123-127.ZHANG Dong,TANG Li-xin.A Method of Calibrating Projector Based on Projecting Color Circular Marks[J].Computer&Digital Engineering,2011,39(4):123-127.
[6]韋爭亮,鐘約先,袁朝龍,等.單攝像機單投影儀三維測量系統標定技術 [J].清華大學學報,2009,49 (2):202-205.WEI Zheng-liang,ZHONG Yue-xian,YUAN Chao-long, et al.Calibration of a 3D measurement system having one camera and one projector[J].JTsinghua Univ(Sci&Tech),2009,49(2):202-205.
[7]費建鋒,畢德學,王永強,等.基于投影二維平面靶標的投影儀現場標定方法研究[J].傳感器與微系統,2008,27(4):34-39.FEIJian-feng,BIDe-xue,WANG Yong-qiang,et al.Research on online calibration of projector based on projecting 2 D planar target[J].Transducer and Microsystem Technologies,2008, 27(4):34-39.
[8]Kim J,Gurdjos P,Kweon I.Geometric and algebraic constraints of projected concentric circles and their applica-tions to camera calibration[J].IEEE Transaction On Pattern Analysis and Machine Intelligence,2005,27(4):637-642.
