一種改進自適應機動目標跟蹤算法?
2014-03-14 01:04:03金亮亮劉亞云
雷達科學與技術 2014年1期
關鍵詞:模型
金亮亮,劉亞云
(中航雷達與電子設備研究院,江蘇無錫214063)
0 引言
機動目標的跟蹤是目標跟蹤的一個重點及難點問題。其中目標的運動模型是一個難點和熱點問題,國內外學者提出了一些描述機動目標運動變化的改進模型,跟蹤效果較好的典型算法是周宏仁[1]提出的基于“當前”統計模型的自適應濾波算法。該模型把機動目標加速度的一步預測看作是“當前”統計加速度,并將它作為修正瑞利分布的均值,以實現目標的均值自適應濾波,同時又利用機動加速度方差與狀態噪聲方差的關系實現目標的方差自適應濾波。但該算法在跟蹤勻速運動和加速度較小的目標時,跟蹤誤差比較大,收斂時間比較長,在跟蹤具有加加速度的機動目標時,速度和加速度的估計延時較大,跟蹤精度也比較大,因此不能實時地反映目標的機動情況。
周東華等人在1991年提出一種強跟蹤濾波器(STF)。通過KF或EKF計算誤差協方差時引入一個時變次優漸消因子λ(k+1),STF在線調整相應的增益矩陣,迫使殘差序列相互正交。最后證明STF對于模型失配具有很強的魯棒性,可以用于跟蹤機動目標。但是,STF的跟蹤精度也存在非機動部分并不理想的缺點。考慮上述問題,提出了一種基于“當前”統計模型的自適應跟蹤算法,即通過對強跟蹤算法的修正以及用截斷正態概率密度模型替代修正瑞利分布來表征目標機動加速度特性,從而來改進跟蹤性能。通過仿真和實際工程的應用,證明上述跟蹤算法能夠有效地提高目標的跟蹤能力。
1 “當前”統計模型自適應算法及強跟蹤算法
“當前”統計模型一維情況下離散時間系統的狀態方程為[2-3]

式中,

W(k)是離散時間白噪聲序列,且方差為

其中,

為加速度方差,α為機動(加速度)時間常數的倒數。
利用瑞利分布隨均值而變化,方差由均值決定的特點,令加速度均值等于當前時刻的加速度預測值,實現均值和方差自適應濾波。加速度方差可按下式計算:a xmax,a-xmax為目標最大正加速度和負加速度。量測方程為


基于“當前”統計模型的強跟蹤算法采用的是KF或EKF作為跟蹤濾波器對機動目標進行跟蹤,在算法中引入了漸消因子,能根據殘差自適應的調節增益。算法流程如下[4]:

0<ρ≤1是遺忘因子,一般取ρ=0.95,β是弱化因子,可根據經驗而定。
2 改進算法
“當前”統計模型跟蹤勻速運動和加速度較小的目標時,跟蹤誤差比較大,收斂時間比較長,在跟蹤具有加加速度的機動目標時,速度和加速度的估計延時較大,跟蹤精度也比較大,而STF在跟蹤目標機動時性能良好,在非機動部分的跟蹤精度不理想。針對上述兩問題,本文從兩個方面著手改進跟蹤算法。
(1)在STF算法中,計算預測協方差P(k+1/k)時,協方差Q(k)的影響被忽視。因此,改進算法將在P(k+1/k)的遞推過程中,增加協方差Q(k)的權重。定義P(k+1/k)如下:

為滿足正交原理,STF算法相應公式變換為

為使狀態估計更光滑,采用平方根函數特性,則

在STF算法中,濾波協方差計算,只有在最佳條件下才成立,且是兩個正定矩陣之差,不便于保持正定和對稱性質。將濾波估值協方差改為

(2)結合“當前”統計模型,采用目標加速度的截斷正態概率密度模型。該模型認為目標的機動加速度為截斷正態分布[6],其概率密度分布和方差分別為
式中,erf(3)≈0.49865。
截斷正態分布的加速度方差和“當前”模型的加速度方差基本一致,對勻速目標進行跟蹤時,噪聲變大,導致對弱機動和非機動目標跟蹤精度變差。需對加速度方差進行修正。修正方法如下:

在目標非機動下,由于人為操作和自然環境影響,目標很小的加速度。取

3 仿真實例
利用Monte-Carlo仿真理論,對改進前后自適應算法在三維[7]直角坐標下進行目標跟蹤比較。掃描周期為0.5 s,加速度上限分別為50 m/s2,仿真200s。X軸方向初始位置16 km,速度300 m/s,目標前75 s作勻加加速運動,75~150 s作勻加速運動,加速度為30 m/s2,150~200 s作勻速運動,目標X軸方向位置、速度、加速度均方根差仿真結果如圖1~4所示。

圖1 位置均方根誤差
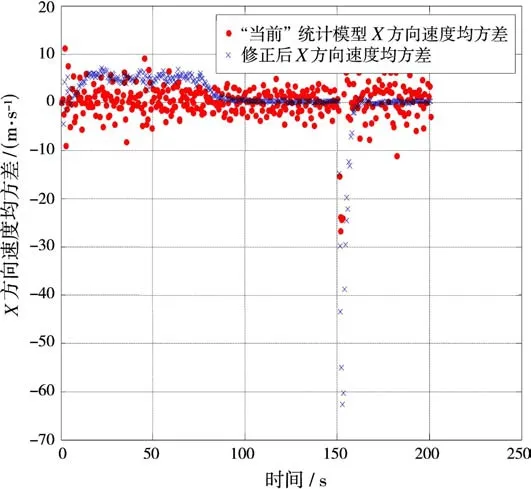
圖2 速度均方根誤差

圖3 加速度均方根誤差

圖4 目標真實加速度
4 結束語
從圖1~4中可以看出,在目標勻加加速運動到加速運動再到運算運動,改進算法在目標位置、速度和加速度的均方差收斂性明顯優于未改進算法,說明通過修正“當前”統計模型下的強跟蹤算法和機動目標加速度的概率密度分布能夠更加有效地對機動目標實施跟蹤。但在非機動目標和機動目標突變和勻加加速運動過程中,由于采樣時間過長(0.5 s),目標信息有一個突變過程,改進跟蹤算法對目標的突變信息有一個緩慢的調節過程,需大約50步左右的調節時間。因此,在這個過程中,跟蹤性能有所下降。但可以提高采樣時間來彌補在突變過程中的跟蹤性能下降。目前該算法已在某型雷達上得到應用。
[1]周宏仁,敬忠良,王培德.機動目標跟蹤[M].北京:國防工業出版社,1991.
[2]王樹亮,阮懷林.基于改進“當前”統計模型的目標跟蹤算法[J].雷達科學與技術,2010,8(4):347-351.WANG Shu-liang,RUAN Huai-lin.A Tracking Algorithm Based on Improved Current Statistical Model[J].Radar Science and Technology,2010,8(4):347-351.(in Chinese)
[3]張媚,梁彥,王增福,等.基于當前統計模型的VDA機動目標跟蹤算法[J].火力與指揮控制,2011,36(2):58-61.
[4]Fan Xiao-jun,Liu Feng,Qin Yong,et al.Current Statistic Model and Adaptive Tracking Algorithm Based on Strong Tracking Filter[J].Acta Electronica Sinica,2006,34(6):981-984.
[5]李濤,王寶樹,喬向東.基于截斷正態概率模型的改進目標跟蹤算法[J].系統工程與電子技術,2003,25(10):1289-1291.
[6]韓宏亮,周希辰,袁桂生.一種三維機動目標跟蹤的改進IMM算法[J].雷達與對抗,2010,30(4):29-33.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
