數控機床上下料用工業機器人的手爪設計
2014-03-06 05:46:38劉宇斐周清華
機電信息 2014年12期
劉宇斐 周清華
(廣州中國科學院工業技術研究院,廣東 廣州 511458)
0 引言
小型化、精密化、規模化和低成本化是目前工業消費品的發展趨勢,近年來,基于工業自動化技術的發展和企業用工成本的提高,珠三角的機械加工企業在競爭激烈的市場中謀求轉型,在生產制造過程中紛紛引入集成加工技術,以期在降低用人成本的同時,實現制造系統的自動化、柔性化、規模化和精確化,提高競爭力。工業生產自動化是在工業生產中廣泛采用各種自動控制、自動檢測和自動調整裝置,對生產過程中進行自動測量、檢驗、計算、控制、監視等,以代替人來操縱機器設備[1]。自動化是生產機械化的更高階段,也是工業技術現代化的基本方向之一。一般來說,工業機器人與數控機床要協同作業,需通過一個末端執行機構將它們串聯起來,而這個機構一般稱之為機器人手爪。進行機械加工的工件是多種多樣的,不同的工件需根據其材料、結構和加工工藝設計不同的手爪,手爪中輔以氣動、液壓、傳感器等技術,來滿足工件自動上下料的要求。手爪的結構、性能如何往往決定整個工藝方案的成敗,所以方案設計必須執行設計依據收集、設計方案制定和方案論證的設計流程。下面就以某設備上的殼體加工過程為例,對其進行自動上下料的機器人手爪開發過程予以說明。
1 手爪設計的工藝條件及相關要求
(1)工件:某設備殼體為鋁鎂合金鑄件,如圖1所示。(2)機加工要求:待加工表面如圖2所示,為大小2個內圓孔表面及1個止口。(3)柔性要求:要求1套手爪能適應裝夾10種以上類似工件。(4)設備配置比例:機器人數量∶數控機床數量≥1∶2。(5)機器人自由度要求:要求能順利完成上下料的動作。在一般情況下,靈活性高的工業機器人,其外圍設備較簡單,可適應產品型號的變化;反之,靈活性低的工業機器人,其外圍設備較復雜[2]。(6)適配數控機床:Brother TC-S2A。(7)數控機床封閉高度:380 mm。(8)數控機床夾緊工裝臺高度:135 mm。(9)裝模高度(數控機床封閉高度-數控機床夾緊工裝臺高度):245 mm。
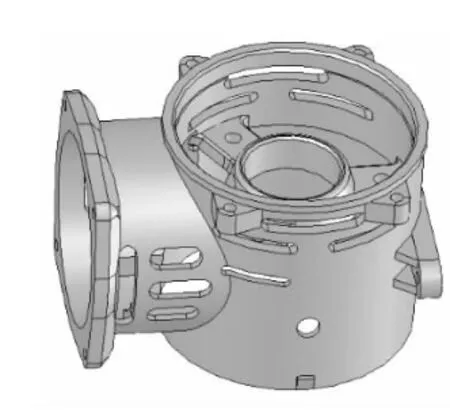
圖1 某設備殼體零件
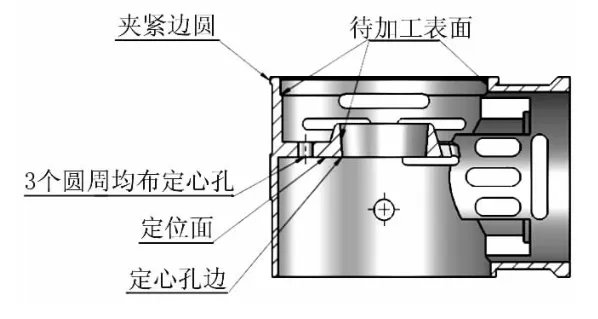
圖2 殼體零件工藝要求標注示意圖
2 工藝分析
(1)機器人選型:根據上下料的動作、單工序抓取零件重量和預估手爪重量選擇六軸機器人,定型為KUKA KR16,送料有較高的可靠性和靈活性。(2)設備配置比例及布局:根據機器人送料速度、一次性耗時及數控機床機加時間、上下料時間形成的工藝節拍確定采用以六軸機器人為中心,機器人圓周放射性排列的1∶3布局方式,便于送料方案展開。(3)換位機構:考慮到機床的封閉高度較低,機器人手爪擬采用雙位旋轉換位結構。(4)公共裝夾要素提取:考慮到本方案中待開發手爪需應對10種以上相似工件,因此要找出他們通用共性的裝夾、定位要素。經分析得知,在這一組件中公共裝夾要素是它的上邊外圓即圖中的夾緊邊圓和中心錐孔[3]。以上分析已經基本確定送料方案。
3 裝夾方案的確定
3.1 方案1:彈簧夾頭夾緊
(1)工作方式:工件處于定位后的工位上,彈簧夾頭對中插入。靠彈性夾頭的向外彈性張力夾持工件,如圖3所示。(2)方案評價:此方案結構簡單。使用彈性夾頭利用錐中心孔定位。然而本方案有兩大缺點,其一是錐中心孔的1/2錐度必須小于摩擦角,否則在工件向上力撤出后工件會滑出;其二是本方案中機器人手爪采用雙位旋轉換位結構不允許手爪受向上的外力,而此結構恰恰有向上的力,所以此方案不可行。
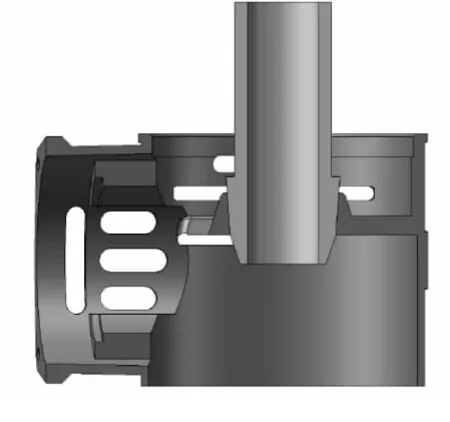
圖3 彈簧夾頭夾緊
3.2 方案2:帶芯軸的彈簧夾頭夾緊
(1)工作方式:工件處于定位后的工位上。首先芯軸插入到位,然后彈簧夾頭插入,靠彈性夾頭的楔入形成的摩擦力夾持工件,如圖4所示。(2)方案評價:此方案是在假設錐中心孔的1/2錐度小于摩擦角的情況下確立的,該方案與方案1的不同是增加了一個芯軸,目的是消除一個施加給手爪的向上外力,即是利用芯軸將施加給手爪的外力轉化成手爪機構的內力。該方案的缺點是結構復雜、重量大,手爪總重難以控制在16 kg以內,由于約束條件太多,暫時列為備選方案。

圖4 帶芯軸的彈簧夾頭夾緊
3.3 方案3:定心芯軸與邊圓定心夾爪組合定位夾緊
(1)工作方式:工件處于定位后的工位上,定心芯軸緩緩插入,到達指定位置后,邊圓定心夾爪夾緊工件上邊圓,靠邊圓定心夾爪夾緊工件;定心軸起到定心作用兼具起到運動時防偏轉作用,如圖5所示。
(2)方案評價:本方案是采用定心芯軸與邊圓定心夾爪組合方式的定位夾緊方式,可消除工件的5個自由度,特點是結構簡單、定位夾緊可靠、重量輕。
綜上所述,從設備的效率、成本、重量和可靠性方面綜合考慮,方案3是最優方案。
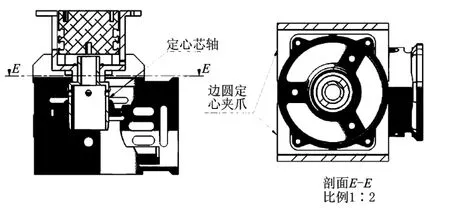
圖5 定心芯軸與邊圓定心夾爪組合定位夾緊
4 手爪整體結構確定
手爪作為機械結構,應該滿足的基本條件是:在滿足預期功能的前提下,性能好、效率高、成本低,在預定使用期限內安全可靠、操作方便、維修簡單和造型美觀等[3]。本次設計充分會充分遵循了以上原則。依據工藝要求、工藝分析和方案論證,確定定心芯軸與邊圓定心夾爪組合定位夾緊方案。考慮數控機床的裝模高度等因素確定手爪的結構形式:采用雙位旋轉換位結構。考慮運行效率、系統剛度等因素安排工位:本方案上下料各安排3個工位。
5 手爪總成
綜合如上因素設計的手爪如圖6所示。其中一組(同邊3個上料工位)用于上料,另一組(另一邊3個上料工位)用于卸料。目前,手爪總成已經應用在自動化制造系統當中,保持著高效率和高可靠性,工作狀態如圖7所示。
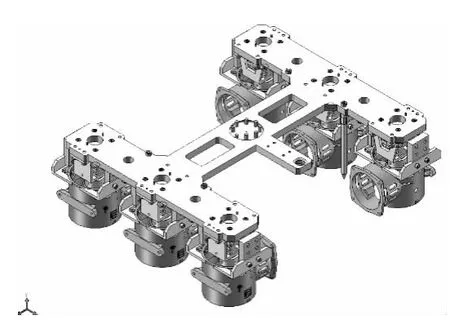
圖6 手爪三維示意圖
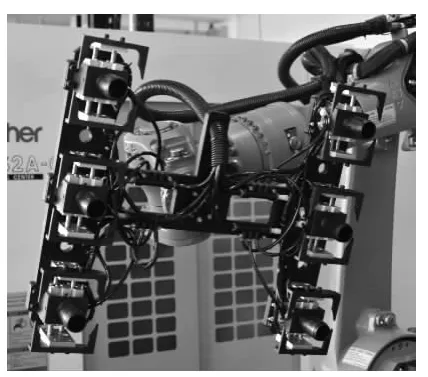
圖7 手爪系統總成實物圖
6 結語
工業機器人與數控機床間的機構、裝置適配設計是一項綜合的精密的設計工作。要考慮定位、夾緊合理性、系統剛度、受力條件、工序節拍、運動特性、接口特點、工況控制特征等綜合因素影響,所以制定、遵循一套科學的設計論證流程是必要的。
[1]吳明亮,樊明龍.自動化生產線技術[M].北京:化學工業出版社,2011
[2]孫樹棟.工業機器人技術基礎[M].西安:西北工業大學出版社,2006
[3]楊可楨,程光蘊,李仲生.機械設計基礎[M].北京:高等教育出版社,2006
