被動式半捷聯(lián)平臺的動力學(xué)模型及其穩(wěn)定性分析
2014-03-01 06:57:00段曉敏李杰劉俊
兵工學(xué)報 2014年9期
段曉敏,李杰,劉俊
(中北大學(xué)儀器科學(xué)與動態(tài)測試教育部重點實驗室,山西 太原030051)
0 引言
被動式半捷聯(lián)平臺的研究是為了解決捷聯(lián)式慣性導(dǎo)航系統(tǒng)在某些高速滾轉(zhuǎn)飛行的制導(dǎo)炮彈中無法有效應(yīng)用的問題。彈體的高速滾轉(zhuǎn)會使得微機電系統(tǒng)(MEMS)陀螺儀無法有效測量滾轉(zhuǎn)角速率,從而不能準(zhǔn)確地建立姿態(tài)矩陣[1-2]。被動式半捷聯(lián)平臺是一種采用機械裝置實現(xiàn)與彈體滾轉(zhuǎn)隔離的慣性平臺,被動式半捷聯(lián)平臺可以使微慣性測量單元(MIMU)在滾轉(zhuǎn)方向保持穩(wěn)定,而在俯仰和偏航方向保持捷聯(lián)。影響被動式半捷聯(lián)平臺性能的因素有很多,其中彈體的飛行俯仰角是一個非常重要的影響因素,研究彈體飛行俯仰角的變化與被動式半捷聯(lián)平臺的穩(wěn)定性關(guān)系具有重要的工程意義。
目前應(yīng)用于小口徑常規(guī)火箭彈的滾轉(zhuǎn)穩(wěn)定方案通常是采用伺服電機在滾轉(zhuǎn)軸穩(wěn)定慣導(dǎo)系統(tǒng),這種方案由于伺服電機的引入從而導(dǎo)致其抗過載能力較差。Imbault 等介紹了美國桑迪亞國家實驗室研發(fā)的一種微小型滾轉(zhuǎn)穩(wěn)定式慣性測量系統(tǒng),可應(yīng)用于低過載、高轉(zhuǎn)速火箭彈的姿態(tài)測量[3]。王晨等對一種火箭彈大動態(tài)單軸平臺慣導(dǎo)系統(tǒng)的姿態(tài)算法進行了研究[4]。
無陀螺捷聯(lián)慣導(dǎo)系統(tǒng)可以應(yīng)用于高速滾轉(zhuǎn)制導(dǎo)炮彈的姿態(tài)測量,但測量精度較低。在無陀螺捷聯(lián)慣導(dǎo)系統(tǒng)中引入磁傳感器對于測量彈體姿態(tài)有一定幫助,但磁傳感器通常容易受到外界干擾而產(chǎn)生較大的誤差。美國的ANSR 炮彈使用的是由6 個加速度計和一個三軸磁傳感器組成的捷聯(lián)式慣性導(dǎo)航系統(tǒng),Ohlmeyer 等對此系統(tǒng)做了介紹[5]。由MEMS 傳感器組成的低成本MIMU 和磁傳感器的組合系統(tǒng)被用于滾轉(zhuǎn)炮彈姿態(tài)的測試,Davis 對此作了研究[6]。劉朝華等研究了利用MEMS 加速度計測量彈體滾轉(zhuǎn)角的方法[7]。李枚等針對振動和高速自旋的環(huán)境對微慣性測量單元與地磁傳感器組合導(dǎo)航方法進行了研究[8]。
本文給出的被動式半捷聯(lián)平臺,采用了由質(zhì)量偏心結(jié)構(gòu)提供回復(fù)力矩的設(shè)計實現(xiàn)平臺在彈體滾轉(zhuǎn)軸的穩(wěn)定。該平臺可以給MIMU 提供合適的應(yīng)用環(huán)境。這種方案避免了伺服電機的使用,同時MIMU由適用于高過載環(huán)境下的MEMS 工藝制造的三正交陀螺儀和三正交加速度計組成,從而可以提高系統(tǒng)整體的抗過載能力,同時這種平臺可以滿足制導(dǎo)炮彈對慣性測量系統(tǒng)的小體積和低成本的要求。
本文對被動式半捷聯(lián)平臺進行了動力學(xué)建模,得到了平臺內(nèi)筒的運動微分方程。通過軟件仿真計算和高速轉(zhuǎn)臺實驗研究了彈體飛行俯仰角對平臺穩(wěn)定性的影響。主要內(nèi)容包括:被動式半捷聯(lián)平臺組成及工作原理,動力學(xué)建模,方程的數(shù)值求解和地面半實物仿真實驗。
1 平臺組成及工作原理
本文給出的被動式半捷聯(lián)平臺的設(shè)計利用了復(fù)擺在重力作用下的運動原理。其核心是采用了質(zhì)量塊偏心安裝的結(jié)構(gòu)獲得回復(fù)力矩來平衡由彈體的滾轉(zhuǎn)運動對平臺引起的摩擦力矩從而讓平臺獲得穩(wěn)定。如圖1所示為復(fù)擺運動原理圖,當(dāng)復(fù)擺受外力矩作用離開豎直方向的平衡位置后,由于復(fù)擺受到重力作用的原因,會產(chǎn)生回到平衡位置的回復(fù)力矩,從而維持復(fù)擺穩(wěn)定在平衡位置附近。圖2為被動式半捷聯(lián)平臺的結(jié)構(gòu)剖面圖,平臺主要由發(fā)射過載轉(zhuǎn)移裝置、軸承、質(zhì)量塊、MIMU、電池和解算電路板組成。兩個深溝球軸承支撐起一個內(nèi)筒,內(nèi)筒內(nèi)部用來安裝MIMU、解算電路板、電池和質(zhì)量塊。質(zhì)量塊用來降低內(nèi)筒相對彈軸的質(zhì)心位置。發(fā)射過載轉(zhuǎn)移裝置用來承受在發(fā)射瞬間內(nèi)筒向后的沖擊力。彈體在飛行過程中高速滾轉(zhuǎn)時,平臺內(nèi)筒利用質(zhì)量偏心產(chǎn)生的回復(fù)力矩通過軸承與彈體滾轉(zhuǎn)軸保持隔離。

圖1 復(fù)擺運動原理示意圖Fig.1 Schematic diagram of compound pendulum motion

圖2 平臺結(jié)構(gòu)剖面圖Fig.2 Sectional drawing of platform
被動式半捷聯(lián)慣性測量系統(tǒng)的工作原理如圖3所示,彈體飛行的俯仰角為α(t),彈體高速滾轉(zhuǎn),半捷聯(lián)平臺安裝在彈體內(nèi)部,平臺內(nèi)部安裝有MIMU和解算模塊,平臺和彈體之間相對轉(zhuǎn)速信息通過光電編碼器測出并由無線傳輸裝置傳送至平臺內(nèi)部的解算模塊。

圖3 被動式半捷聯(lián)慣性測量系統(tǒng)工作示意圖Fig.3 Schematic diagram of the partial strapdown inertial measurement system
2 平臺的動力學(xué)模型建立
首先分析彈體在飛行過程中的受力情況,假設(shè)彈體飛行時的攻角很小,彈體的受力情況如圖4所示,彈體在空中主要受到豎直向下的重力、垂直于彈軸方向的升力、分別沿彈軸前后兩個方向的推力和阻力的作用。另外,彈體在豎直方向的加速度為av(t),其大小由重力和升力在豎直方向的分力的合力決定。

圖4 炮彈飛行時受力示意圖Fig.4 Force condition of the flying projectile
根據(jù)彈體在飛行時的受力情況和運動狀態(tài)可以分析得出安裝在其內(nèi)部的被動式半捷聯(lián)平臺內(nèi)筒的受力情況。如圖5所示,在彈體飛行過程中,由于炮彈的旋轉(zhuǎn)運動,使得彈體與半捷聯(lián)平臺內(nèi)筒之間會通過軸承滾動產(chǎn)生摩擦力的作用。在豎直方向上,半捷聯(lián)式平臺內(nèi)筒受到重力作用。在徑向上,由于炮彈受到空氣升力的作用,半捷聯(lián)平臺內(nèi)筒會受到軸承對其支撐力的作用。在軸向上,由于炮彈受到推力和空氣阻力的作用,半捷聯(lián)平臺內(nèi)筒也會受到軸承對其支撐力的作用。這里兩個支撐力分別構(gòu)成了軸承的軸向載荷與徑向載荷。圖5中,C 為內(nèi)筒質(zhì)心,l 為擺的等效擺長。

圖5 平臺內(nèi)筒受力示意圖Fig.5 Force condition of the platform’s inner cylinder
根據(jù)圖4彈體和圖5平臺內(nèi)筒的受力情況,結(jié)合需要解決的問題,建立了如圖6所示的簡化力學(xué)模型。圖6(a)中,一個轉(zhuǎn)動慣量為I0、質(zhì)量為m、擺長為l 的擺,在摩擦力矩Mf和重力G 的作用下產(chǎn)生的擺動角度為θ(t). 擺的支撐體(實際為彈體)在豎直方向上受到重力Gp的作用,同時還受到支撐力Fs(實際為升力)的作用,擺的支撐體在Gp和Fs的作用下在豎直方向形成加速度av(t). 另外,圖6(a)中的擺與彈體俯仰角的關(guān)系為如圖6(b)所示,擺的擺動平面始終與俯仰角為α(t)的直線(實際為彈體軸向)垂直。
根據(jù)圖5所示的內(nèi)筒受力分析和圖6所示的簡化的力學(xué)模型來建立平臺內(nèi)筒的動力學(xué)方程。圖6中擺受到的總的力矩和M 等于摩擦力矩Mf與重力回復(fù)力矩Mg的矢量和:

式中:Mg與重力加速度g、彈體在豎直方向的加速度av(t)、擺動角度θ(t)、擺長l 和彈體俯仰角α(t)之間的關(guān)系表達式為

從(2)式中可以看出,當(dāng)俯仰角α(t)為90°時,回復(fù)力矩Mg為0.
軸承的摩擦力矩Mf的SKF 表達式[9]為

式中:Mrr為滾動摩擦力矩;Msl為滑動摩擦力矩;Msc為密封件摩擦力矩;Md為阻力損失、攪動、潑濺等的摩擦力矩。其中Mrr和Msl與彈體俯仰角的變化相關(guān)。俯仰角的變化會導(dǎo)致軸承軸向負荷與徑向負荷發(fā)生變化,而軸向負荷變化會導(dǎo)致滾珠與軸承軸向接觸面之間的滾動摩擦力矩和滑動摩擦力矩變化,徑向負荷變化會導(dǎo)致滾轉(zhuǎn)與軸承徑向接觸面的滾動摩擦力矩與徑向摩擦力矩發(fā)生變化,最終導(dǎo)致Mrr與Msl的變化。其變化關(guān)系為:隨著俯仰角的增大,Mrr和Msl的值會先增大,當(dāng)俯仰角增大到一定值時,Mrr和Msl會達到最大值,此時當(dāng)俯仰角再繼續(xù)增大時,Mrr和Msl又會逐漸減小。
由牛頓第二定律知,外力矩沿固定軸分量的代數(shù)和等于對該軸的轉(zhuǎn)動慣量與角加速度的乘積,因此總的力矩和M 還可以表示為
結(jié)合(1)式與(4)式得到

將(2)式帶入(5)式得到被動式半捷聯(lián)平臺內(nèi)筒的動力學(xué)方程:

(6)式描述了被動式半捷聯(lián)平臺內(nèi)筒轉(zhuǎn)動角度θ(t)與彈體俯仰角α(t)、彈體在豎直方向的加速度av(t)、軸承的摩擦力矩Mf、平臺內(nèi)筒轉(zhuǎn)動慣量I0、內(nèi)筒質(zhì)量m、重力加速度g 以及等效擺長l 之間的關(guān)系。由于(6)式為二階齊次非線性常微分方程,無法用解析法對其進行求解,為了對平臺的穩(wěn)定性做進一步的研究,需要借助Matlab 用數(shù)值積分法對方程進行求解。
3 俯仰角對平臺穩(wěn)定性影響的計算仿真
在進行數(shù)值計算之前,需要先把(6)式簡化成一階微分方程組。引入輔助變量y1= θ(t),y2=代入(6)式得到一階微分方程組:

方程組(7)式中,假設(shè)下落加速度av(t)=0,g為恒定值,計算所需其他參數(shù)采用某被動式半捷聯(lián)平臺實驗樣機的實際參數(shù),如表1所示。
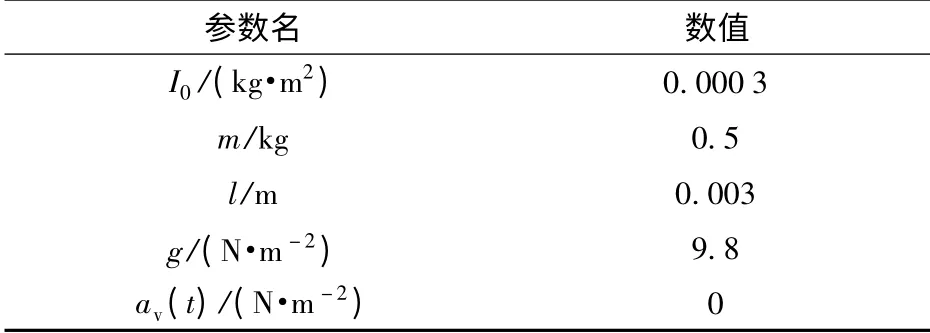
表1 半捷聯(lián)平臺計算參數(shù)Tab.1 Parameters of partial strapdown platform
由半捷聯(lián)平臺內(nèi)筒的力學(xué)模型可知,在俯仰角α(t)<90°時,質(zhì)量偏心可以形成復(fù)擺運動效應(yīng),因此仿真時將α(t)值分別取0°、15°、30°、45°、60°和75°,軸承摩擦力矩Mf的大小與俯仰角α(t)相關(guān),不同α(t)對應(yīng)的Mf的計算值如表2所示。

表2 不同α(t)下Mf 的計算值Tab.2 Calculated values of friction torque Mf with different α(t)
將表1和表2中的參數(shù)代入方程組(7)式中,并設(shè)初值y1(0)=0,y2(0)=0,在Matlab 中利用4 階龍格-庫塔法進行計算求解得到如圖7所示的不同俯仰角下(t)和θ(t)解。
圖7(a)~圖7(f)分別顯示了俯仰角α(t)在0° ~75°時被動式半捷聯(lián)平臺內(nèi)筒滾轉(zhuǎn)角速率(t)和角度θ(t)的時間曲線。從圖7(a)~圖7(f)中的(t)的曲線可以看出,(t)的計算值正負對稱,符合復(fù)擺的運動規(guī)律。從θ(t)的曲線可以看出,θ(t)的計算值都在正區(qū)間內(nèi),這是由于在求解方程時假定θ(t)和(t)初值為0,并且軸承摩擦力矩方向總是朝著軸承的旋轉(zhuǎn)方向。從圖7(a)~圖7(f)中可以看出(t)和θ(t)的幅值和周期都隨俯仰角α(t)的增大而增大,因此俯仰角α(t)越小,平臺越穩(wěn)定。

圖7 仿真曲線圖Fig.7 Simulation results
4 地面半實物仿真實驗
為了對所建立的被動式半捷聯(lián)平臺的動力學(xué)模型以及圖7中的計算結(jié)果進行驗證,在三軸高速轉(zhuǎn)臺上對被動式半捷聯(lián)平臺樣機進行了地面半實物仿真實驗。用轉(zhuǎn)臺在滾轉(zhuǎn)方向的高速旋轉(zhuǎn)模擬彈體的高速滾轉(zhuǎn),轉(zhuǎn)臺在俯仰方向的變化模擬彈體的俯仰角變化。將被動式半捷聯(lián)平臺樣機安裝在轉(zhuǎn)臺內(nèi)部,通過安裝在平臺內(nèi)筒的角速率傳感器測量得到內(nèi)筒的擺動角速率(t)值,同時通過積分得到擺動角度θ(t)值。
設(shè)置轉(zhuǎn)臺滾轉(zhuǎn)方向保持10 r/s 的高轉(zhuǎn)速,俯仰方向分別設(shè)置在0°、15°、30°、45°、60°和75°. 實驗情況如圖8所示,實驗得到平臺內(nèi)筒的擺動角速率(t)和角度θ(t)的曲線圖如圖9所示。

圖8 高速轉(zhuǎn)臺實驗Fig.8 Experiment on the high-speed turntable
圖9(a)~圖9(f)分別為轉(zhuǎn)臺俯仰方向設(shè)置在0° ~75°時被動式半捷聯(lián)平臺內(nèi)筒的擺動角速率(t)和角度θ(t)的實測曲線。從圖9(a)~圖9(f)可以看出,平臺內(nèi)筒在做復(fù)擺擺動運動,且擺動角速率(t)與角度θ(t)隨著俯仰角的增大而增大。將圖9中的實驗結(jié)果與圖7中的仿真結(jié)果進行對比,轉(zhuǎn)臺實驗結(jié)果與仿真計算結(jié)果中角速率(t)和角度θ(t)波形周期的差別不明顯,并且波形幅值隨俯仰角的增大而增大的規(guī)律也相符。但由于實驗所用的被動式半捷聯(lián)平臺樣機存在一定的機械加工誤差,以及轉(zhuǎn)臺與平臺之間存在一定的安裝誤差,導(dǎo)致實驗結(jié)果與計算結(jié)果也存在一些差別,比如圖9(a)中角速率波形的第二個波峰、圖9(d)中角速率波形的第一、二個波峰以及圖9(f)中角速率波形的第一個波谷都存在一定的抖動,這是由于受到機械誤差和轉(zhuǎn)臺震動影響軸承摩擦力矩瞬間發(fā)生跳變造成的。另外圖9(e)和圖9(f)中角速率曲線分別出現(xiàn)了兩個峰值相差較大的情況,產(chǎn)生這個變化的主要是因為隨著俯仰角的增大,軸承的啟動扭矩變大,而軸承啟動扭矩的變大導(dǎo)致軸承在從靜止到轉(zhuǎn)動的過程中所需克服的靜摩擦力矩增大。當(dāng)軸承開始正常轉(zhuǎn)動后,軸承摩擦力矩恢復(fù)為正常的Mf,從而使后面的角速率曲線又恢復(fù)正常。總體上轉(zhuǎn)臺實驗曲線結(jié)果與計算求解曲線結(jié)果規(guī)律相吻合,驗證了所建立的平臺動力學(xué)模型,得出俯仰角越小,被動式半捷聯(lián)平臺越穩(wěn)定的規(guī)律。

圖9 高速轉(zhuǎn)臺實驗結(jié)果Fig.9 Test results of the high-speed turntable
5 結(jié)論
本文介紹了一種適用于高速滾轉(zhuǎn)制導(dǎo)炮彈的被動式半捷聯(lián)平臺。通過對彈體及平臺進行力學(xué)分析,建立了半捷聯(lián)平臺內(nèi)筒的動力學(xué)模型,通過數(shù)值計算得出了不同彈體俯仰角下半捷聯(lián)式平臺內(nèi)筒的滾動角度和角速率,并在三軸高速轉(zhuǎn)臺上進行了半實物仿真實驗驗證。轉(zhuǎn)臺實驗結(jié)果與仿真結(jié)果都說明彈體俯仰角的大小對半捷聯(lián)式平臺有直接的影響,彈體俯仰角越小,半捷聯(lián)式平臺越穩(wěn)定。本研究對被動式半捷聯(lián)平臺的適用條件研究做出了一定的理論貢獻,對于解決制導(dǎo)炮彈上慣性測量系統(tǒng)的應(yīng)用問題具有一定的指導(dǎo)意義。
References)
[1] Velde E V,Bentley G K,F(xiàn)agan J H,et al. Onboard computer requirements for navigation of a spinning and maneuvering vehicle[C]∥AIAA Guidance,Control,and Fight Dynamics Conference.Pasadena,California:AIAA,1968:1 -13.
[2] Garg S C,Morrow L D,Mamen R. Strapdown navigation technology:a literature survey [J]. Journal of Guidance and Control,1978,1(3):161 -172.
[3] Imbault J J,Tjulin H,Kinney R,et al. Mini-RIMS:a miniature roll-stabilized inertial measurement system[C]∥7th Conference on Sounding Rockets,Balloons and Related Space Systems. Ocean City,Maryland:AIAA,1986:35 -43.
[4] 王晨,董景新,高宗耀,等. 火箭彈大動態(tài)單軸平臺慣導(dǎo)系統(tǒng)姿態(tài)算法[J]. 中國慣性技術(shù)學(xué)報,2012,20(3):257 -261.WANG Chen,DONG Jing-xin,GAO Zong-yao,et al. Attitude algorithm of high dynamic range single-axis platform INS on rocket projectile[J]. Journal of Chinese Inertial Technology,2012,20(3):254 -261. (in Chinese)
[5] Ohlmeyer E J,F(xiàn)raysse J W,Pepitone T R. Guidance,navigation and control without gyros:a gun-launched munition concept[C]∥AIAA Guidance,Navigation,and Control Conference and Exhibit. Monterey,California:AIAA,2002:1 -14.
[6] Davis B S. Using low-cost MEMS accelerometers and gyroscopes as strapdown IMUs on rolling projectiles[C]∥Proceeding of Position Location and Navigation Symposium,IEEE. California:IEEE,1998:594 -601.
[7] 劉朝華,王勇,毛玉良,等. 基于MEMS 加速度計的彈體滾轉(zhuǎn)角測量方法[J]. 中國慣性技術(shù)學(xué)報,2012,20(5):505 -509.LIU Zhao-huo,WANG Yong,MAO Yu-liang,et al. Measurement method of projectile's roll angle based on MEMS accelerometers[J]. Journal of Chinese Inertial Technology,2012,20(5):505 -509. (in Chinese)
[8] 李枚,代剛,唐海林,等. 一種高動態(tài)使用微慣性測量單元的實現(xiàn)[J]. 中國慣性技術(shù)學(xué)報,2012,20(2):127 -130.LI Mei,DAI Gang,TANG Hai-lin,et al. Realization of micro inertial measurement unit used in high dynamic environment[J].Journal of Chinese Inertial Technology,2012,20(2):127 -130.(in Chinese)
[9] SKF. The SKF model for calculating the frictional moment[EB/OL]. [2013-12-20]. http:∥www. skf. com/group/products/bearings-units-housings/ball-bearings/principles/friction/skf-model/index. html?WT. oss = Frictional% 20moment&WT. z_oss_boost=0&tabname=All&WT.z_oss_rank=1.
猜你喜歡
計算機應(yīng)用(2022年2期)2022-03-01 12:33:42
計算機應(yīng)用(2022年1期)2022-02-26 06:57:42
計算機應(yīng)用(2021年4期)2021-04-20 14:06:36
計算機應(yīng)用(2021年3期)2021-03-18 13:44:48
計算機應(yīng)用(2021年1期)2021-01-21 03:22:38
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21