無人機地面運動的動力學建模及仿真
2014-03-01 12:09:24關永亮侯玉秀賈宏光劉波馬伍元
兵工學報 2014年7期
關永亮,侯玉秀,賈宏光,劉波,馬伍元
(1.長春理工大學 機電工程學院,吉林 長春130022;2.中國科學院 長春光學精密機械與物理研究所,吉林 長春130033)
0 引言
無人機以其體積小,造價低,使用方便,對使用環境要求低等特點,已經成為目前航空領域的一個熱門研究對象。對無人機的研究一般都著重于對其飛行特性的研究,而隨著現代無人機對地面運動特性的要求日益增高,對無人機地面運動特性的研究變得越來越重要[1-3]。
無人機地面運動特性通常是指,在地面運動過程中,無人機及其相關系統的幾何學、運動學和動力學特性[4-5]。無人機在地面運動時,在各種作用力的作用下,無人機和輪胎的受力以及工作狀況都會出現復雜的變化,這就要求對各種運動情況下的無人機及輪胎的受力情況都應有清晰的了解和準確的把握[6]。
國內外對無人機地面運動模型已經進行了廣泛的研究,但目前的模型還存在以下4 個方面不足:
1)模型不能同時考慮無人機的6 個自由度,因此對無人機地面運動的考察不全面[7-8];
2)模型的未知數大于方程的個數[9-10];
3)沒有考慮輪胎的彈性特性[1];
4)沒有考慮空氣動力對無人機地面運動的影響[1]。
地面運動穩定性是衡量無人機地面運動特性的重要指標,無人機翻倒和輪胎滑動是無人機地面運動過程中的多發事故。本文采用彈性輪胎理論,建立了無人機的地面運動模型,用于了解和把握地面運動過程中無人機及輪胎的受力情況,保證無人機在無翻倒和無輪胎滑動的情況下進行穩定的地面運動,提高無人機地面運動的穩定性。
1 無人機動力學模型
1.1 坐標系定義與基本假設
1.1.1 坐標系定義
1)地面坐標系(Oxyz);
2)輪胎坐標系(Otxtytzt);
3)機體坐標系(Owxwywzw).
1.1.2 基本假設
1)無人機模型為剛性模型,且質量為常數;
2)假設地面參考系為慣性參考系,即假設地面坐標系為慣性坐標系;
3)忽略地球曲率,即假設地球為平面;
4)假設機體xw軸和yw軸處于無人機對稱面內。
1.2 輪胎模型
1.2.1 輪胎受力分析
在無人機地面運動過程中,輪胎要承受來自地面的多種作用力的作用,這些作用力具體包括:
1)地面支持力與滾動摩擦力
在地面運動過程中,無人機在重力作用下,輪胎與路面的接地印跡區域產生法向的相互作用力,即地面支持力Fg,使輪胎發生變形[11]。由于輪胎變形時材料的內摩擦產生彈性遲滯損失,使輪胎變形時所作的功不能完全收回,部分轉化為熱能損失在大氣中;同時輪胎在接地印跡區域有摩擦損失,以及輪胎滾動對外部空氣有攪動損失,這些能量損失都是產生滾動摩擦力Ft的原因。滾動摩擦力Ft與地面支持力Fg具有如下的關系式:

式中:μ 為輪胎的滾動摩擦系數。
2)側向力與回正力矩
無人機在地面運動過程中,由于地面的凹凸不平對無人機產生顛簸,在操縱無人機進行轉彎時,由于輪胎內壓不平衡以及側風的作用等原因,使得輪胎和地面之間產生側向作用力Fl[11].輪胎在側向力Fl的作用下會發生側向變形。輪胎速度方向將不再沿著坐標系xt軸方向,而是與坐標系xt軸方向產生夾角θ[11],θ 稱為輪胎的側偏角。
側向變形隨著側向力Fl的增加而增加,使得側偏角θ 也增加,側向力和側偏角的之間具有如圖1所示的曲線。從圖1中可以看出,在一定范圍內,側向力Fl與側偏角θ 具有正比關系[11],具體可以表示為

式中:c 為輪胎的側偏剛度。

圖1 側向力與側偏角關系圖Fig.1 Lateral force vs.slip angle
側偏角的存在表明輪胎的側向變形量并不均勻。假設側向力的大小與側向變形量呈正比,那么側向變形大的區域將會產生較大的側向力,側向變形小的區域將會產生較小的側向力。側向力的合力如圖2所示,其作用點與輪胎接地印跡區域的中心偏離了一定的距離n,該距離被稱為輪胎拖距。由于輪胎拖距的存在,側向力就會對輪胎接地印跡區域的法線產生一個回正力矩M[11].M 與Fl具有如下的關系式:
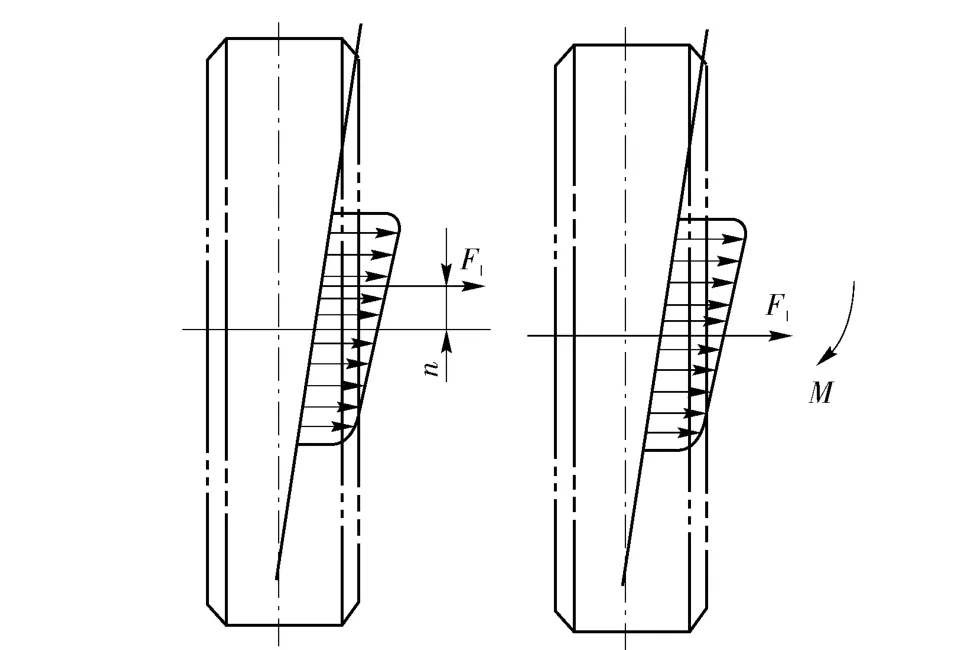
圖2 輪胎變形圖Fig.2 Deformation diagram of tire

式中:n 為輪胎拖距。
綜上所述,在無人機地面運動過程中,以無人機為研究對象,輪胎將受到地面支持力Fg,滾動摩擦力Ft,側向力Fl和回正力矩M 的作用。輪胎具有如圖3所示的受力圖。
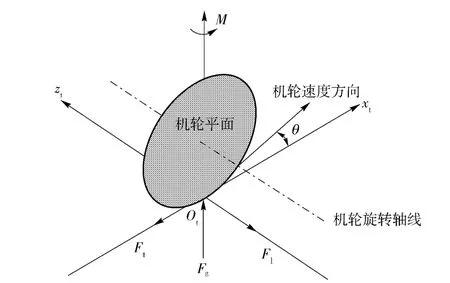
圖3 輪胎受力圖Fig.3 Force diagram of tire
1.2.2 輪胎側向摩擦系數
輪胎和地面是一種附著連接,隨時都有可能出現相對滑動,所能傳遞作用力的大小是有限的。作用力的大小由側向摩擦系數衡量,側向摩擦系數是與速度有關的變量,它們具有如圖4所示的關系曲線。當最大側向摩擦系數所能提供的最大作用力不能滿足無人機地面運動的要求時,輪胎和地面之間就會出現相對滑動[12]。

圖4 側向摩擦系數與速度關系圖Fig.4 Lateral friction coefficient vs.velocity
1.3 無人機模型
1.3.1 無人機受力分析
在地面運動過程中,無人機不僅要承受上述地面作用于輪胎的作用力,還要受到自身重力、發動機推力、空氣作用力和慣性力等作用力的作用。無人機的受力情況如圖5所示,無人機地面運動的幾何關系如圖6所示。
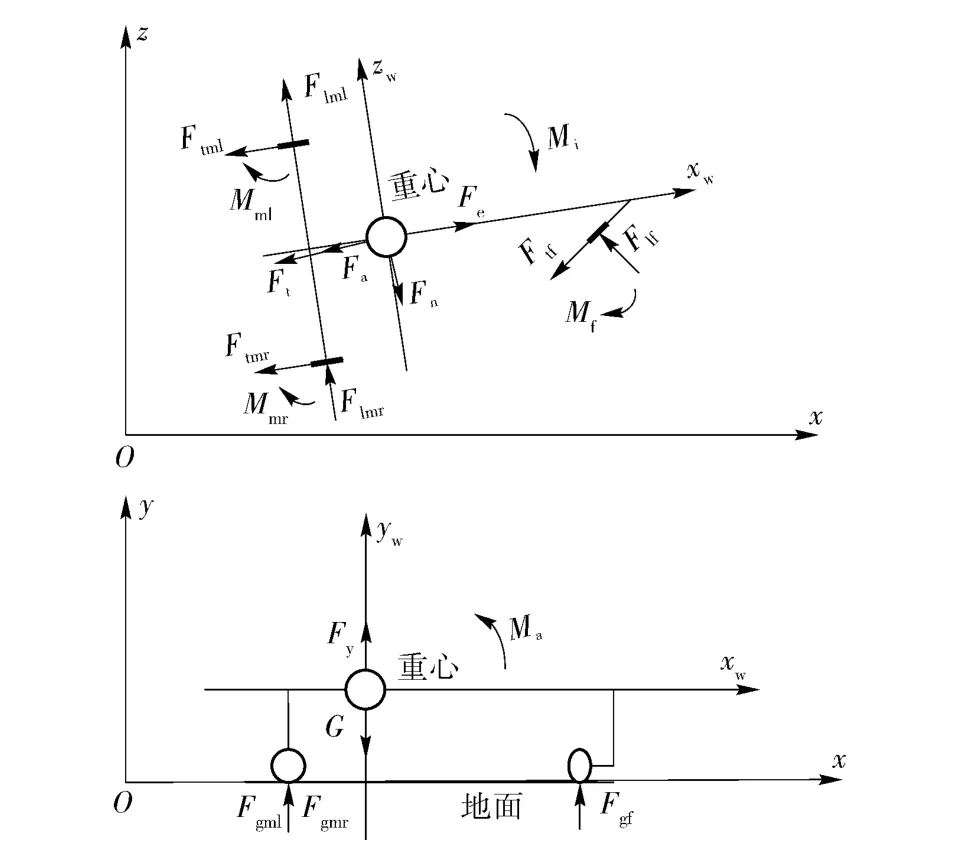
圖5 無人機地面運動受力圖Fig.5 Force diagram of UAV

圖6 無人機地面運動幾何關系圖Fig.6 Geometrical relationship of UAV ground maneuver
圖5所示的地面運動過程中,無人機所受到的作用力具體包括:
1)自身重力G,發動機推力Fe;
2)空氣升力Fy,空氣阻力Fa,空氣力矩Ma;
3)地面作用于前輪、主左輪、主右輪輪胎的支持力Fgf、Fgml、Fgmr,滾動摩擦力Ftf、Ftml、Ftmr,側向力Flf、Flml、Flmr和回正力矩Mf、Mml、Mmr.它們之間滿足:
式中:μf為前輪輪胎的滾動摩擦系數;μml為左主輪輪胎的滾動摩擦系數;μmr為右主輪輪胎的滾動摩擦系數。

式中:cf為前輪輪胎的側偏剛度;cml為左主輪輪胎的側偏剛度;cmr為右主輪輪胎的側偏剛度;θf為前輪輪胎的側偏角;θml為左主輪輪胎的側偏角;θmr為右主輪輪胎的側偏角。
式中:nf為前輪輪胎的輪胎拖距;nml為左主輪輪胎的輪胎拖距;nmr為右主輪輪胎的輪胎拖距。
4)切向慣性力Ft、法向慣性力Fn和慣性力矩Mi.它們之間滿足如下關系:

式中:m 為無人機的質量;v 為無人機重心的速度。

式中:γ 為無人機機體坐標系xw軸相對于地面坐標系x 軸的轉角;β 為機體坐標系xw軸與無人機速度方向的夾角。

式中:J 為無人機相對于機體坐標系yw軸的轉動慣量。
1.3.2 基本動力學方程
無人機能夠進行6 個自由度的地面運動,其運動過程應該用6 個自由度方程來描述。為了能夠完全描述無人機在6 個自由度的運動狀態,根據圖5所示的無人機受力情況與圖6所示的無人機運動幾何關系情況,分別建立3 個沿機體坐標軸xw、yw和zw的平動方程,和3 個繞機體坐標軸xw、yw和zw的轉動方程。
1)沿機體坐標軸xw軸方向:

2)沿機體坐標軸yw軸方向:

3)沿機體坐標軸zw軸方向:

4)繞機體坐標軸xw軸:
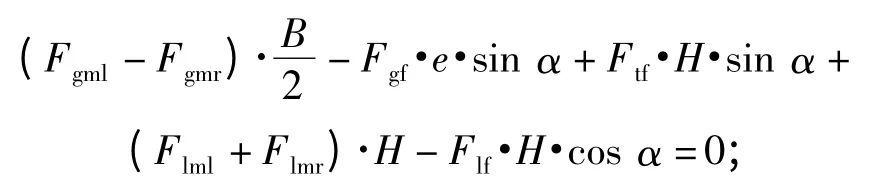
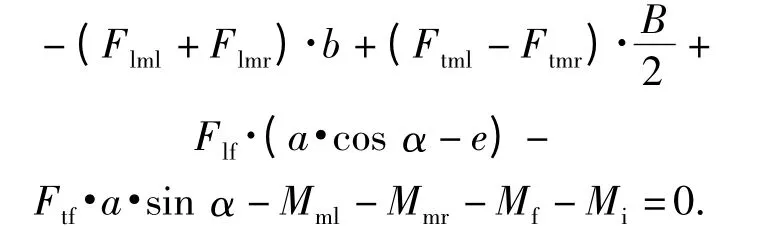
5)繞機體坐標軸zw軸:

6)繞機體坐標軸yw軸:
1.3.3 幾何方程
根據圖6所示的無人機地面運動的幾何關系圖,可以建立如下4 個幾何關系方程:
式中:r 為無人機的轉彎半徑;α 為前輪轉角。
2 仿真分析
以某型號無人機的參數,對其地面運動過程中最容易發生事故的操縱前輪轉彎過程在Matlab 軟件中進行仿真。在仿真結果中提取影響無人機地面運動的4 個關鍵參數:前輪側向力、主輪側向合力和左、右主輪地面支持力。它們與前輪轉角和無人機速度的關系分別如圖7~圖10所示。
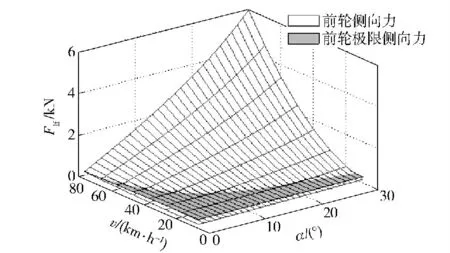
圖7 前輪側向力與前輪極限側向力Fig.7 Lateral and limit lateral forces of front wheel
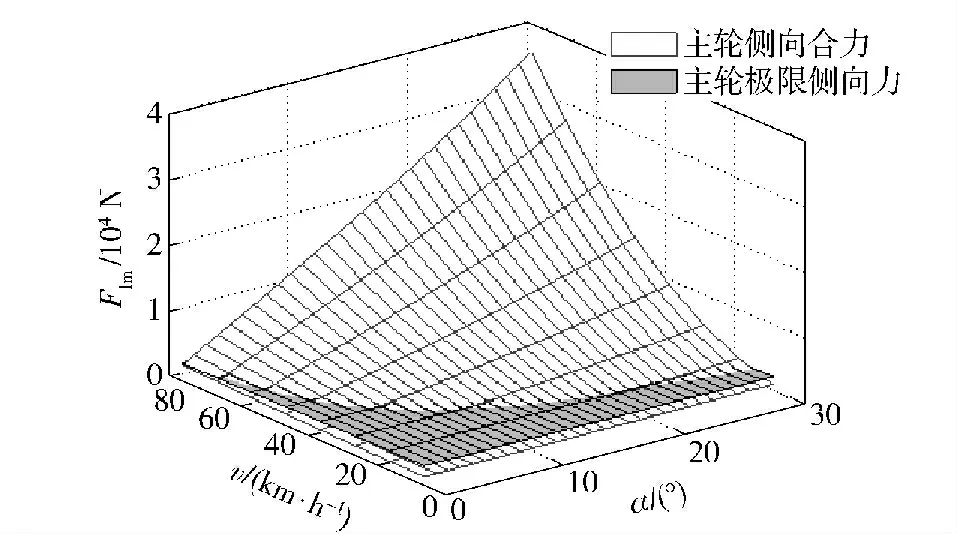
圖8 主輪側向合力與主輪極限側向力Fig.8 Lateral and limit lateral forces of main wheel

圖9 左主輪地面支持力Fig.9 Vertical force of left main wheel
從圖7和圖8中可以看出,隨著前輪轉角和無人機速度的增加,前輪、主輪側向力也增加,當前輪轉角和無人機速度增加到某一值時,前輪、主輪側向力就會達到極限值。若前輪轉角或無人機速度繼續增加,前輪、主輪側向力就會超過極限值,此時最大側向摩擦系數所能提供的最大作用力不能滿足無人機地面運動的要求,前輪、主輪與地面之間就會發生相對滑動。
從圖9和圖10中可以看出,隨著前輪轉角和無人機速度的增加,左主輪的支持力會減小,右主輪的支持力會增加,當前輪轉角和無人機速度增加到某一值時,左主輪的支持力就會等于0,而右主輪的支持力仍然大于0.左主輪支持力等于0,表明此時左主輪已經不承受載荷,若前輪轉角或無人機速度繼續增加,無人機將沿前輪和右主輪連線(即圖6所示側翻軸線)翻倒。
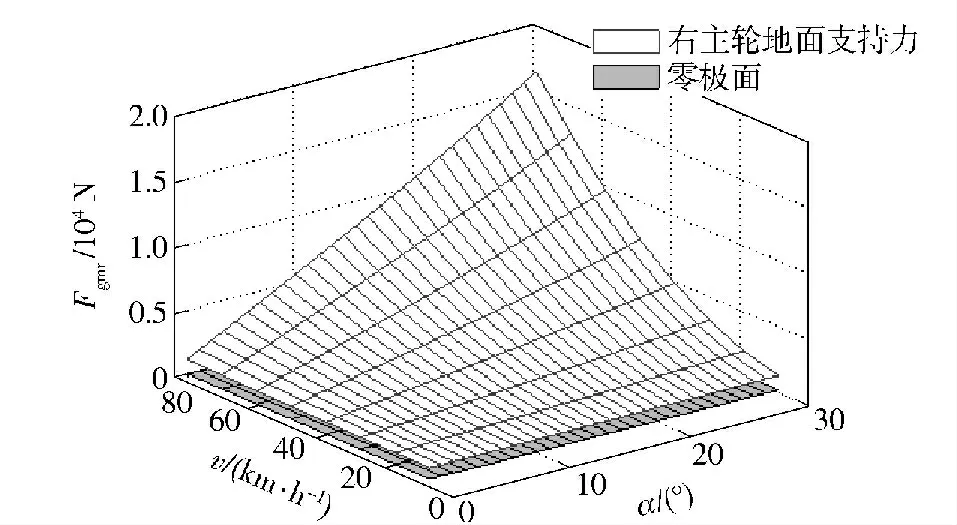
圖10 右主輪地面支持力Fig.10 Vertical force of right main wheel
3 約束條件及可行域
3.1 約束條件
鑒于在地面運動過程中,無人機可能會出現前輪、主輪滑動和無人機沿側翻軸線翻倒的情況,必須對某些影響無人機地面運動的參數加以限制。
3.1.1 限制前輪滑動
在無人機地面運動過程中,當最大側向摩擦系數所能提供的最大作用力不能滿足無人機地面運動的要求時,輪胎與地面之間就會出現相對滑動。為了防止前輪滑動,無人機地面運動過程中所需要的前輪側向力應滿足以下關系式:

式中:[Flf,l]為前輪極限側向力。
3.1.2 限制主輪滑動
與前輪相同,為了防止主輪滑動,無人機地面運動過程中所需要的主輪側向合力應足以下關系式:

式中:[Flm,l]為主輪極限側向力。
3.1.3 限制無人機翻倒
在無人機地面運動過程中,最嚴重的事故是沿側翻軸線翻倒。地面支持力Fg的值是判定無人機是否會翻倒的關鍵,當一側主輪的地面支持力為0,即一側主輪已經不承受載荷,另一側主輪的地面支持力仍然大于0 時,則認定無人機有翻倒的趨勢,此種情況要堅決避免,所以地面支持力Fg必須滿足:

3.2 可行域
以同一型號無人機的參數在Matlab 軟件中進行仿真,在約束條件下得到無人機地面運動過程中,不同速度下前輪轉角和轉彎半徑的可行域,分別如圖11、圖12所示。圖11中,曲線下方為不同速度下前輪轉角的可行域;圖12中,曲線上方為不同速度下轉彎半徑的可行域。
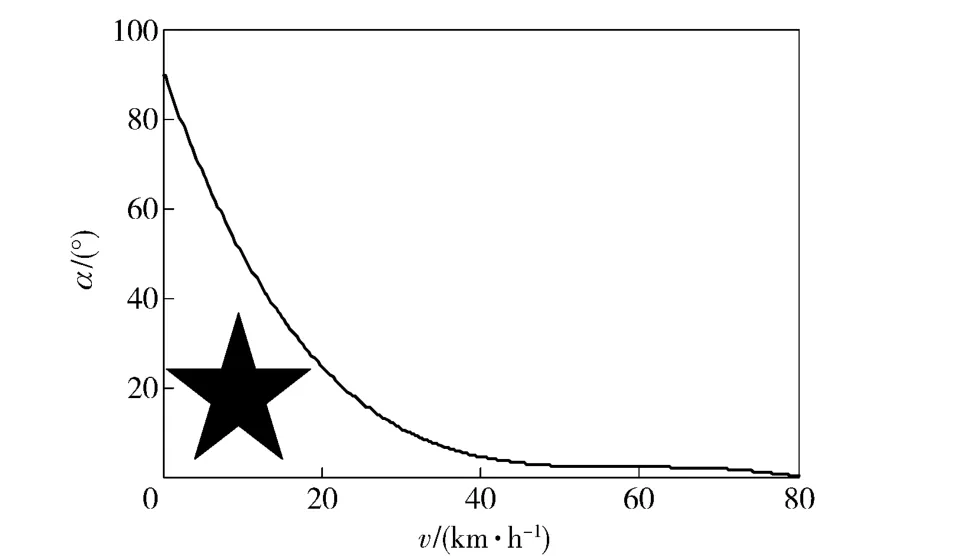
圖11 前輪轉角可行域Fig.11 Feasible region of turning angle of front wheel
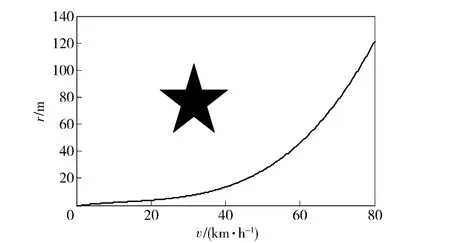
圖12 轉彎半徑可行域Fig.12 Feasible region of turning radius
4 結論
本文通過分析地面運動過程中無人機的受力情況,采用彈性輪胎理論,建立了無人機地面運動的動力學模型。該模型考慮無人機地面運動過程中所要承受的來自地面、空氣以及自身的作用力,描述了無人機的地面運動過程。應用某一型號無人機的參數在Matlab 軟件中進行仿真,通過對仿真結果的分析,發現在無人機地面運動過程中,若對某些參數不加以約束,無人機會出現側翻和輪胎滑動事故。因此,引入無人機地面運動模型的約束條件,重新進行仿真,得到了不同速度下前輪轉角和轉彎半徑的可行域。
References)
[1] 顧宏斌.飛機地面運行的動力學模型[J].航空學報,2001,22(2):163 -167.GU Hong-bin.Dynamic model of aircraft handing[J].Acta Aeronautica et Astronautica Sinica,2001,22(2):163 -167.(in Chinese)
[2] 傅莉,王曉光.無人機近距離空戰微分對策建模研究[J].兵工學報,2012,33(10):1210 -1216.FU Li,WANG Xiao-guang.Research on close air combat modeling of differential gams for unmanned combat air vehicles[J].Acta Armamentrii,2012,33(10):1210 -1216.(in Chinese)
[3] 傅陽光,周成平,胡漢平.無人飛行器海上航跡規劃差分進化算法研究[J].兵工學報,2012,33(3):295 -300.FU Yang-guang,ZHOU Cheng-ping,HU Han-ping.Research on differential evolution for path planning for unmanned aerial vehicle in ocean environment[J].Acta Armamentrii,2012,33(3):295 -300.(in Chinese)
[4] 錢小妹.飛機操縱前輪轉彎特性仿真研究[D].南京:南京航空航天大學,2008.QIAN Xiao-mei.Research on steering nose wheel aircraft by dynamic simulation[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2008.(in Chinese)
[5] Duprez J,Mora-Camino F,Villaume F.Control of the aircraft-onground lateral motion during low speed roll and manoeuvers[C]∥IEEE Aerospace Conference Proceedings.Washington:IEEE,2004:2656 -2666.
[6] 張明.飛機地面動力學若干關鍵技術研究[D].南京:南京航空航天大學,2009.ZHANG Ming.Research on some key technologies of aircraft ground dynamics[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2009.(in Chinese)
[7] Goldthorpe S H,Dangaran R D,Dwyer J P,et al.Guidance and control design for high-speed roll out and turn off (ROTO),NASA-CR-201602[R].Washington:NASA,1996:33 -75.
[8] Yu S H,Moskwa J J.A global approach to vehicle control:coordination of four wheel steering and wheel torques[J].Journal of Dynamic Systems,Measurement,and Control,1994,116(4):659 -667.
[9] Allen R W,Rosenthal T J,Szostak H T.Steady state and transient analysis of ground vehicle handling,SAE Paper 870495 [R].Washington:SAE,1987:49 -78.
[10] Allen R W,Szostak H T,Rosenthal T J,et al.Characteristics influencing ground vehicle lateral/ directional dynamic stability,SAE Paper 910234[R].Washington:SAE,1991:56 -89.
[11] Mitschke M,Wallentowitz H.Dynamik der kraftfahrzeuge[M].4th ed.New York:Springer-Verlag Berlin and Heidelberg GmbH& Co.K,2004:5 -135.
[12] 王超.汽車輪胎/路面摩擦系數的估算方法研究[D].長春:吉林大學,2007.WANG Chao.Study on the estimation method of vehicle tire/road friction[D].Changchun:Jilin University,2007.(in Chinese)