清潔機器人與智能手機遠程監控相結合的應用研究
2014-02-28 07:38:46馬芷薔郭晨陽
安徽工程大學學報 2014年2期
陳 俊,馬芷薔,郭晨陽
(1.安徽機電職業技術學院電氣工程系,安徽蕪湖 241000;2.海軍安慶市職業技術學校,安徽安慶 246016;3.合肥學院電子信息與電氣工程系,安徽合肥 230601)
隨著網絡技術和智能掌上設備技術的成熟,從多功能集成發展的角度,提出通過智能手機借助無線wifi實現對清潔機器人的手控功能.并且,由于清潔機器人具有每天即便在家中無人的情況下,定時準點工作數小時的規律(這里無需實現24小時報警,主要是針對白天家中無人時),通過它結合傳感器技術實現對家庭溫度、濕度以及煙霧的監控,并在有危險情況發生時向手機發出警報,從而提升家庭安全保障.
1 系統框架設計
選用P89V51RD單片機為系統核心,控制電機驅動,實現手動控制時掃地機器人的前后左右4個方向的運動和停止功能.配備溫濕傳感器SHT75和光電式煙感器,實現對環境情況進行監測,并將實時數據發送給單片機進行分析.若超出正常值,將通過無線wifi向手機發出警報.整體設計框架如圖1所示.

圖1 系統框架
基于本系統的功能要求和實用性角度考慮,選擇P89V51RD作為控制系統的核心,由于需要實現手動控制,所以需要對小車兩個后輪進行驅動,選用L298N可以實現電機正反轉調速,它具有良好的起動性能,可同時驅動兩臺直流電機,非常適用于這里的設計,驅動原理圖如圖2所示.這里,VSS接+5V為L298內部工作電源,VS接+12V供給電機,續流二極管用于吸收由負載電感造成的反峰,對L298進行保護,防止被燒壞.J11,J12可用跳線進行選擇性連接,電機M1可用P1.4或P4.3控制,電機M2可用P1.3或P4.2控制.
無線傳輸方面,選擇USR-WIFI232-T串口轉wifi模塊,可實現串口與無線wifi之間的雙向透明通信,內置TCP/IP協議,小巧實用、功耗低,速率可達150M,一般家庭完全可實現全覆蓋.對溫濕度的檢測方面,選用溫濕傳感器SHT75,包括一個電容性聚合體測濕敏感元件和一個用能隙材料制成的測溫元件,在同一芯片上與A/D轉換及串行接口無縫連接,輸出全標定的數字信號,穩定可靠.煙霧傳感器包括離子式和光電式兩種,離子式煙感器對熊熊大火較為敏感,而光電式煙感器對于“悶燒”更為敏感,鑒于本系統主要用于家庭環境,故這里選擇MQ-2光電式煙霧傳感器.
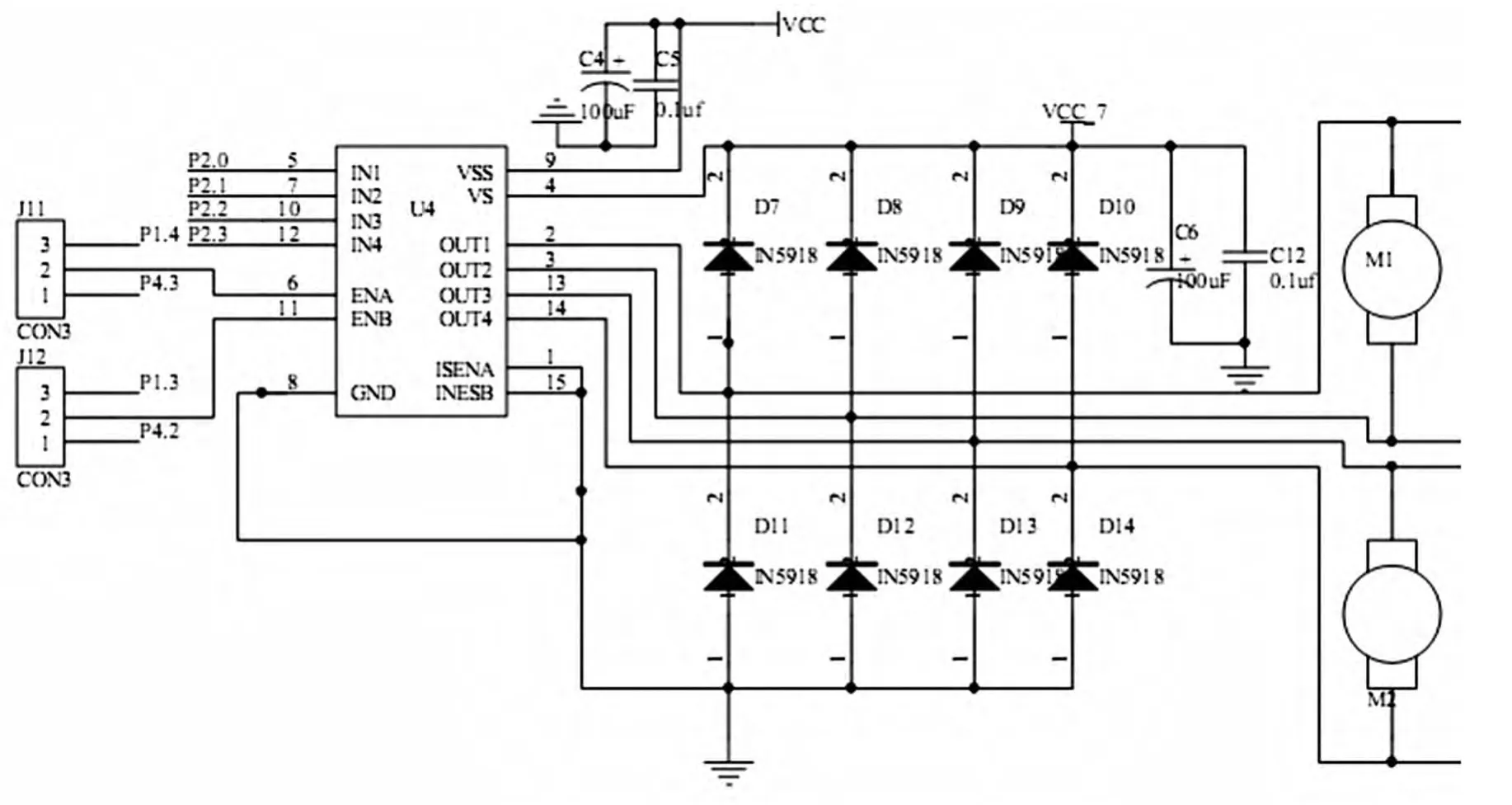
圖2 L298驅動直流電機原理圖
2 小車運動算法控制
小車在不同的環境下,無論是自主運行還是手控運行,均存在著輪速誤差的問題.特別是在運動速率較高時,若不加以控制,會出現跑偏或與定位目標距離相差太大的情況.若僅以編碼器對輪速進行監測反饋,實現反饋控制,對運行算法的要求自然就提高,否則可能會使車身由于不斷糾錯而出現“抖動”前行,行進效果如圖3a所示.基于此,我們在小車運行過程中結合粒子群算法對PID參數進行優化整定.實現PID輸出適配器由一個值同時控制兩邊電機的正反轉,由pwm輸出值的大小決定輪速,并且經過試驗,去除了pwm相對較小的值,以避免出現由于輸出力矩過小,小車無法行進的情況.
將PID控制中的參數(Kp,Ki,Kd)作為PSO中的一個粒子的位置Xi,將PID控制器的參數整定問題轉化為了三維的PSO算法問題,如公式(1)所示.而后,定義一個性能指標作為目標函數,用于評價PSO算法中粒子個體的適應度.

這里,使慣性權重w自0.5向0.1遞減,從而提高收斂速度.r1和r2是處于0和1之間的隨機二維向量.c1和c2為自學習以及群學習因子.在一定采樣時間內,選取足夠多的個體,用性能指標評估每個個體的適應度,選定適應度大的作為PID控制參數.加入結合PSO的PID算法后,“抖動”問題得到順利解決,其行進狀態如圖3b所示.以此方式,盡管工作周邊環境可能產生變化并帶來影響,小車也可在最快時間內調整好參數,實現輪速的精確控制,從而實現小車的自適應運行,提高其穩定工作能力.軟件設計流程如圖4所示.

圖3 加入PSO&PID算法前后小車行進狀態對比圖
3 Android平臺下的軟件設計
Android是一種基于Linux的自由及開放源代碼的操作系統,主要使用于移動設備,并且逐步擴展到電視、數碼相機和游戲機等領域.它是一個完全開放的平臺,能支持種類極其豐富的多種硬件,為APP開發者提供了寬泛自由的環境.本項目設計中,基于java語言下,運用eclipse軟件編程,編輯的界面包括:1個activity,1個實現手動和自動運行切換的switch,4個控制上下左右4個方向的button以及3個imageview.當點擊button時,觸發方向控制事件,通過調用wifi控件,向已經配對好的設備發ASCII碼,從而實現對清潔機器人的手動控制;相應的,在機器人自主運行過程中,如果設備傳感器接受到溫度、濕度或煙霧的觸發信號,可由單片機通過串行口轉wifi模塊向手機報警,當手機接受到數據時,可以自動改變報警圖標的效果.這里有兩種方法可以實現,一種是用imagebutton,當收到數據時自動按下圖標,使顏色發生變化,第二種是imageview,當收到數據時,變換圖標觸發imageview模塊,使正常下的白色imageview替換成紅色,這里選用imageview,界面設計如圖5所示,包括了軟件進入后手動與自動控制切換的界面.
清潔機器人上的wifi模塊,是在上位機進行設置的,當工作地點變更、wifi環境改變時,只需借助串口調試助手,對wifi和密碼進行重新設置即可,手機wifi連接方式和平時連接wifi方式一樣,其他部分都不用做特殊的更改,具有較好的靈活性.

圖4 軟件設計流程圖
4 實驗調試
這里報警功能的設計是基于清潔機器人每天工作數小時的固定規律,及其運作過程中對整個家庭的相對較廣的覆蓋面.并且,現在家居中的無線wifi基本上都是全天工作的,這就為清潔機器人在家中檢測到安全問題時向主人的手機發出警報提供了基本途徑的保障.清潔機器人一般是雙電機驅動,搭配一個萬向輪實現全方位自由移動和轉彎.這里,以自行設計的與清潔機器人運動原理一樣的小車為實驗平臺,驗證本方案的實施效果.小車實物圖如圖6所示.
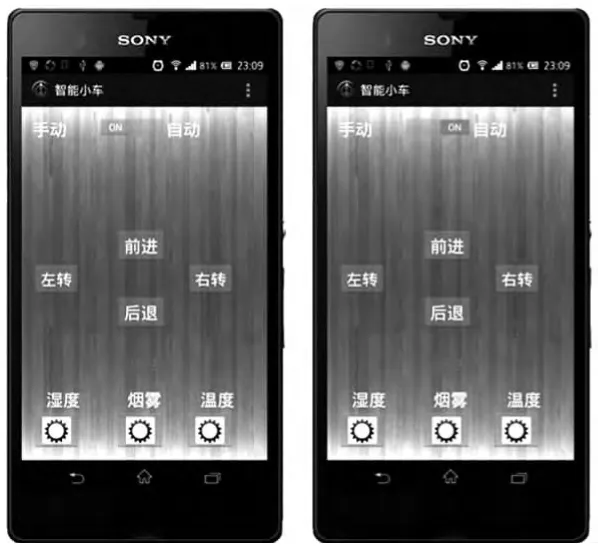
圖5 手機手自動切換演示界面
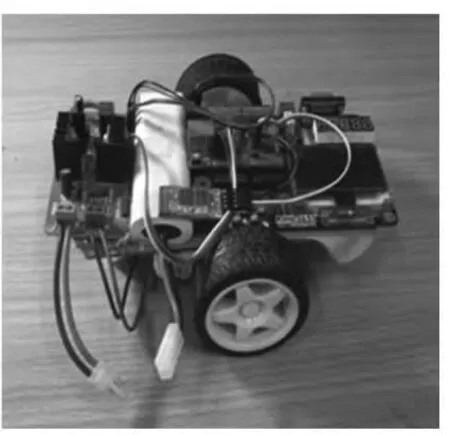
圖6 仿清潔機器人小車平臺
4.1 傳感器數據處理
SHT75溫度檢測范圍是-40℃~+123.8℃,分辨率0.01℃;濕度檢測范圍是0至100%RH.當SHT75檢測到周邊溫度上升時,其讀出的溫度值并非實際環境溫度,而是傳感器自身加熱后的溫度,且此溫度一般高于環境5~10℃.SHT75由能隙材料PTAT研發,正比于絕對溫度,具備極好的線性.基于此,其溫度輸出轉換如公式(2)所示.

這里,T是轉換后得到的實際溫度值,t1和t2為溫度轉換系數,分別取值-40.1和0.01.
居室里比較舒適的相對濕度應控制在40%~50%,當濕度高于65%或者低于38%時,不僅人體會感到不適,細菌繁殖加快,且對家居環境的各類電器會產生危害,甚至絕緣故障,所以濕度的控制也需予以重視.相比于溫度的極好線性能力,由于實際溫度與測量參考溫度(25℃)會有明顯差異,故SHT75的相對濕度輸出呈現一定的非線性,如圖7所示.SHT75的輸出濕度對溫度依賴性較大,對電壓基本無依賴性,故僅需考慮實際環境溫度因素對濕度信號作溫度補償即可,補償方法如公式(3)所示.Tt為實際環境溫度,SDOT為實際傳感器讀出值.這里主要用于預警,故在調試好閾值后,完全可以達到測試靈敏度要求.

選用光電式煙霧傳感模塊置于清潔機器人上,適于檢測家庭火災中易出現的“悶燒”,這里要說明的是,家用燃氣一般包括天然氣、城市煤氣和液化石油氣3大類,這里由于掃地機器人的工作高度較低,只能針對氣體密度重于空氣的液化石油氣進行監測,而相對較輕的天然氣和煤氣,若需檢測,可在廚房距離天花板50公分左右位置安裝無線聯網煙感器.
只有在清潔機器人處于自動運行狀態時,傳感器的監測功能才予以啟動,手動狀態下無需監測功能.在傳感器啟動監測功能后,將傳感器的輸出信號發送至單片機處理,預先設定好各傳感器閾值,通過中斷方式進行處理對比.若屬于正常范圍,則不發送任何信號,一旦有突破閾值的情況,則根據中斷類型激活報警程序,通過無線wifi向手機發送警報.

圖7 SHT75相對濕度輸出轉換關系圖
4.2 實際測試
為滿足煙霧傳感器測試要求,我們選用打火機為測試道具.打火機中的氣體以丁烷為主,重于空氣,適于對小車傳感器和報警能力進行測試.先手動控制小車至打火機下方,切換手動控制為自動運行,與此這時,小車啟動傳感檢測功能,在煙霧傳感器檢測到丁烷氣體且達到閾值后,向手機發出煙霧報警;同樣的,將打火機點燃逐步靠近小車,溫濕度傳感器在檢測到溫度變化,并達到閾值后,會向手機發出溫度報警,手機測試效果如圖8所示.
5 結論
本文嘗試在清潔機器人的基礎上增添溫濕傳感器和煙霧傳感器,利用清潔機器人每天規律化的工作機制,實現在家中無人時的安全監控,借助無線wifi模塊實現手機與機器人之間的雙向通信.經過20次實驗,通過對氣體源和溫度源位置的不同變換,測試其警報靈敏度,成功率達到90%.結果表明,此初步設計方案可行,實用潛力較大,在未來清潔機器人產品的設計生產中具有較好的應用前景.
[1] Goldberg K,Gentner S,Sutter C,et al.The mercury project:A feasibility study for internet robots[J].Robotics &Automation Magazine,IEEE,2000,7(1):35-40.
[2] Bardella A,Danieletto M,Menegatti E,et al.Autonomous Robot Exploration in Smart Environments Exploiting Wireless Sensors and Visual Features[J].Annals of Telecommunications Des Tele-communications,2012,67(7-8):297-311.
[3] 邱實.服務機器人遠程控制關鍵技術研究[D].哈爾濱:哈爾濱工業大學,2010:17-22.
[4] 蔣薇.機器人遠程控制的研究與應用[D].北京:北方工業大學,2007:21-22.
[5] 熊光輝.基于Android平臺手機遠程監控系統的設計與實現[D].成都:電子科技大學,2012:34-40.
[6] 張琨.基于Android平臺的WLAN解決方案[D].濟南:山東大學,2010.
[7] 許恩江,李合增,劉金河,等.智能服務機器人在家庭安防中的核心技術初探[J].兵工自動化,2010,29(9):88-89.
[8] 陸建飛,趙福臣.基于Internet的機器人遙操作研究[J].機械工程師,2008(8):119-121.
[9] 李瑞峰,顧義坤.基于GSM/GPRS網絡的家用機器人遠程監控系統設計[J].制造業自動化,2006,28(10):71-74.
[10]李琴,陳立定,任志剛.基于Android智能手機遠程視頻監控系統的設計[J].電視技術,2012,36(7):134-136.