小波神經(jīng)網(wǎng)絡(luò)的無(wú)刷直流電機(jī)轉(zhuǎn)子位置檢測(cè)方法
2014-02-27 02:07:20張振海
武漢工程大學(xué)學(xué)報(bào) 2014年10期
關(guān)鍵詞:檢測(cè)
劉 揚(yáng) ,張振海
1.集美大學(xué)誠(chéng)毅學(xué)院 ,福建 廈門(mén) 361021;2.蘭州交通大學(xué)自動(dòng)化與電氣工程學(xué)院,甘肅 蘭州 730070
0 引 言
無(wú)刷直流電機(jī)由于其效率高,體積小,啟動(dòng)轉(zhuǎn)矩大和維修方便等特點(diǎn),已經(jīng)普遍應(yīng)用于國(guó)民經(jīng)濟(jì)的各個(gè)領(lǐng)域.而傳統(tǒng)的無(wú)刷直流電機(jī)需要附加位置傳感器提供換相信號(hào),限制了其應(yīng)用領(lǐng)域.因此,無(wú)刷直流電機(jī)的無(wú)位置傳感器控制成為研究重點(diǎn).無(wú)刷直流電機(jī)無(wú)位置傳感器控制的關(guān)鍵是構(gòu)建轉(zhuǎn)子位置信號(hào)檢測(cè)電路以獲得可靠的轉(zhuǎn)子位置信號(hào).反電動(dòng)勢(shì)法是許多無(wú)位置傳感器轉(zhuǎn)子位置檢測(cè)方法中最常用的方法,但是由于反電動(dòng)勢(shì)法調(diào)速范圍不廣,而且該方法忽略了無(wú)刷直流電機(jī)的電樞反映,得到的換相信號(hào)存在一定誤差,因此,人們提出運(yùn)用小波神經(jīng)網(wǎng)絡(luò)進(jìn)行轉(zhuǎn)子位置辨識(shí)的方法,它結(jié)合了小波分析和人工神經(jīng)網(wǎng)絡(luò)的優(yōu)良特性,成為非線性系統(tǒng)建模與控制的新途徑[1-2].
本文建立了無(wú)刷直流電機(jī)的數(shù)學(xué)模型,并將小波神經(jīng)網(wǎng)絡(luò)應(yīng)用于無(wú)刷直流電機(jī)轉(zhuǎn)子位置的辨識(shí)當(dāng)中,構(gòu)建一個(gè)輸入為3個(gè)線電壓,輸出為轉(zhuǎn)子電角度的轉(zhuǎn)角預(yù)測(cè)模型,通過(guò)仿真證實(shí),此方法辨識(shí)轉(zhuǎn)子位置精度高,自適應(yīng)性強(qiáng),能有效地控制電機(jī)換向.
1 無(wú)刷直流電機(jī)位置檢測(cè)方法
假設(shè)采用反電動(dòng)勢(shì)為梯形波的無(wú)刷直流電機(jī)結(jié)構(gòu)模型,三相橋式星形聯(lián)接,三相繞組對(duì)稱(chēng)且互差120 ℃兩兩導(dǎo)通,不計(jì)渦流和磁滯損耗,忽略齒槽效應(yīng)和電樞反應(yīng),則電機(jī)的電壓平衡方程為[3]:
(1)
其中:
Ua、Ub、Uc——定子各相相電壓;
ia、ib、ic——定子各相相電流;
R——定子各相電阻;
L——定子各相繞組自感;
M——定子各相繞組間互感;
ea、eb、ec——定子各相反電動(dòng)勢(shì).
根據(jù)公式(1)得直流無(wú)刷電機(jī)各相反電動(dòng)勢(shì)為:
(2)
則線反電動(dòng)勢(shì)為:
(3)
線反電動(dòng)勢(shì)與電機(jī)換相點(diǎn)的關(guān)系如圖1所示.
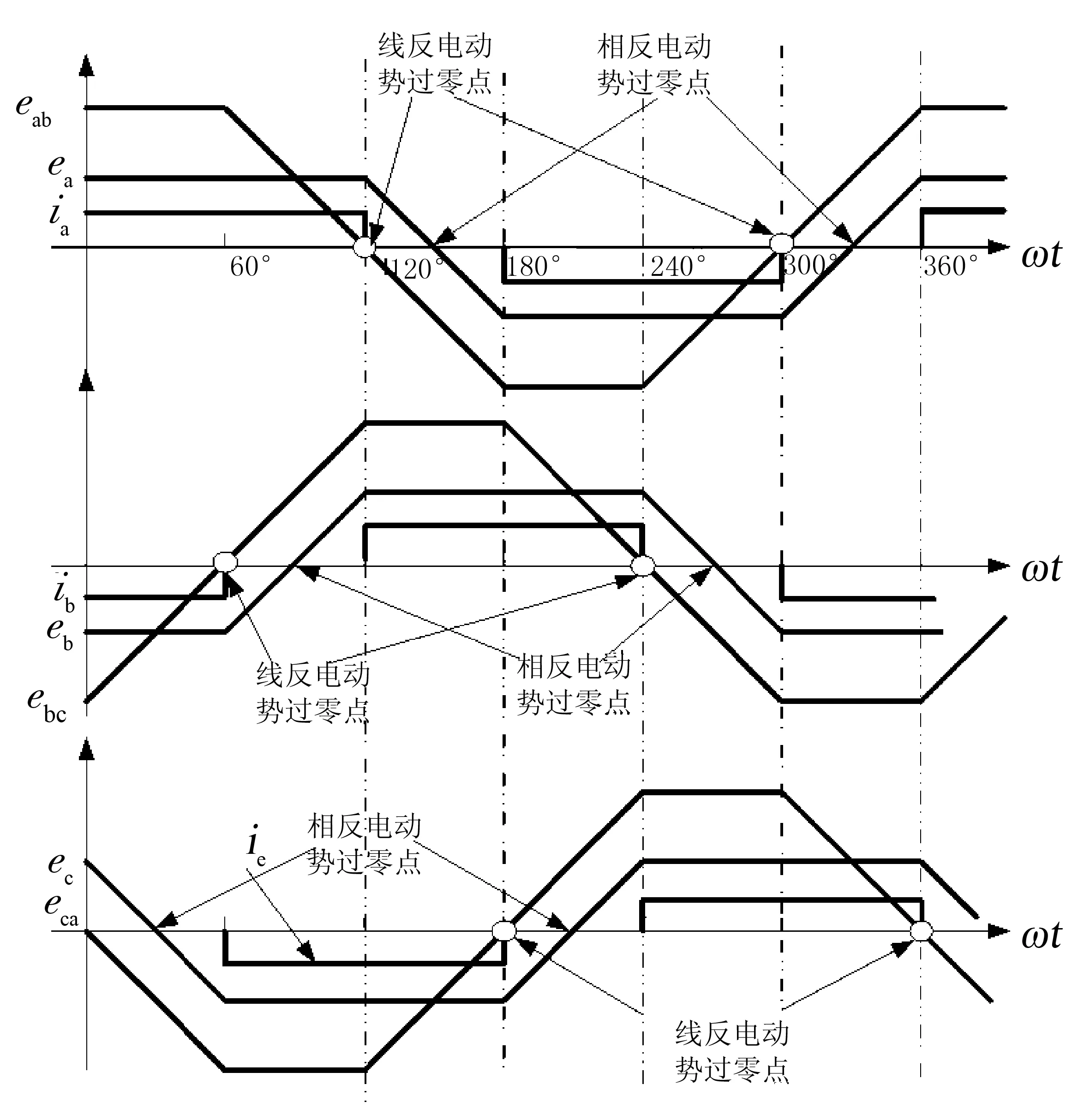
圖1 反電動(dòng)勢(shì)和相電流波形圖
由圖1可知,對(duì)于相反電動(dòng)勢(shì),電機(jī)線反電動(dòng)勢(shì)的過(guò)零點(diǎn)直接就是換相點(diǎn),無(wú)需考慮任何延時(shí),因此利用線反電動(dòng)勢(shì)來(lái)檢測(cè)轉(zhuǎn)子位置變得更直接,更有效[4].但是線反電動(dòng)勢(shì)過(guò)零點(diǎn)正好是開(kāi)關(guān)器件動(dòng)作位置,會(huì)產(chǎn)生較大干擾信號(hào),如何濾除混于反電動(dòng)勢(shì)中的強(qiáng)干擾信號(hào),并在該位置進(jìn)行準(zhǔn)確的過(guò)零信號(hào)的檢測(cè)是關(guān)鍵.本文采用小波神經(jīng)網(wǎng)絡(luò)辨識(shí)電機(jī)轉(zhuǎn)子位置,并應(yīng)用遺傳算法優(yōu)化小波神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu).在全局范圍內(nèi)初步搜尋最優(yōu)解并將最優(yōu)解鎖定在某個(gè)小的區(qū)域內(nèi),與此同時(shí)確定小波神經(jīng)網(wǎng)絡(luò)的初始平移系數(shù)、伸縮系數(shù)等參數(shù),最后應(yīng)用小波神經(jīng)網(wǎng)絡(luò)在局部范圍內(nèi)快速尋找最優(yōu)解.該方法提高了轉(zhuǎn)子位置辨識(shí)的精度和收斂速度,可獲得準(zhǔn)確的換相信號(hào).
2 小波神經(jīng)網(wǎng)絡(luò)轉(zhuǎn)子位置檢測(cè)分析
小波神經(jīng)網(wǎng)絡(luò)具有良好的函數(shù)逼近效果以及神經(jīng)網(wǎng)絡(luò)辨識(shí)的優(yōu)點(diǎn).將小波神經(jīng)網(wǎng)絡(luò)應(yīng)用于無(wú)刷直流電機(jī)無(wú)位置傳感器的控制中可以得到更為準(zhǔn)確的換相信號(hào)[5-8].
2.1 小波網(wǎng)絡(luò)結(jié)構(gòu)設(shè)計(jì)
(4)
隱含層輸入
(5)
本文采用兩層前饋式神經(jīng)網(wǎng)絡(luò),輸入層為三個(gè)線電壓Uab、Ubc、Uca,輸出層為轉(zhuǎn)子電角度θ.網(wǎng)絡(luò)輸出方程
(6)
其中:
ψ(·)——隱層激勵(lì)函數(shù)(小波函數(shù));
wij——第i個(gè)節(jié)點(diǎn)到輸入層第j個(gè)節(jié)點(diǎn)的權(quán)值(隱含層);
xj——第j個(gè)節(jié)點(diǎn)的輸入(輸入層);
bi——第i個(gè)節(jié)點(diǎn)的平移系數(shù)(隱含層);
ai——第i個(gè)節(jié)點(diǎn)的伸縮系數(shù)(隱含層);
wi——第i個(gè)隱層節(jié)點(diǎn)到輸出的權(quán)值.
通過(guò)訓(xùn)練可使wi、wij、ai、bi達(dá)到最優(yōu),進(jìn)而使網(wǎng)絡(luò)的輸出很好地逼近實(shí)際值.
2.2 網(wǎng)絡(luò)參數(shù)初始化
網(wǎng)絡(luò)參數(shù)初始值選擇的好壞關(guān)系到收斂速度的快慢.wij的初始化步驟為:
(1)wij的初始值是在區(qū)間[-1,1]上隨機(jī)產(chǎn)生均勻分布的隨機(jī)數(shù).
(2)對(duì)wij按行進(jìn)行歸一化.
(7)
(3)乘以相關(guān)因子,即
其中p是輸入層節(jié)點(diǎn)數(shù);q是隱含層節(jié)的點(diǎn)數(shù);C是與隱含層相關(guān)常數(shù).
(4)設(shè)第j個(gè)輸入樣本中的最大值為xjmax,最小值為xjmin,則
(8)
(9)
則由公式(9)得
(10)
墨西哥帽狀小波函數(shù)的時(shí)域中心r0=0,半徑Δr=1.08,帶入公式(10)便可求得伸縮系數(shù)ai和平移系數(shù)bi的初始值.
2.3 網(wǎng)絡(luò)訓(xùn)練算法
遺傳算法具有不會(huì)陷入局部極小的特點(diǎn)而且收斂速度較快.網(wǎng)絡(luò)訓(xùn)練目標(biāo)函數(shù)為:
(11)
其中:m為樣本個(gè)數(shù);g為樣本輸出;y為網(wǎng)絡(luò)輸出.
(1)編碼:神經(jīng)網(wǎng)絡(luò)的權(quán)值學(xué)習(xí)是一個(gè)復(fù)雜的連續(xù)參數(shù)優(yōu)化問(wèn)題.將wi、wij(權(quán)值)和ai、bi(伸縮平移系數(shù))按順序排成字符串作為問(wèn)題的一個(gè)解,按照實(shí)數(shù)編碼的遺傳算法能大大提高解的精度和收斂速度.
(2)選取適應(yīng)度函數(shù):適應(yīng)度函數(shù)是遺傳算法優(yōu)化小波網(wǎng)絡(luò)參數(shù)時(shí)評(píng)價(jià)染色體適應(yīng)度的一個(gè)必不可少的參數(shù).它表明個(gè)體對(duì)環(huán)境適應(yīng)能力的強(qiáng)弱,適應(yīng)度的高低與個(gè)體被選中的幾率有關(guān),即
(12)
(3)進(jìn)化操作
a.算子的選擇:
(13)
其中ps是個(gè)體被選中概率;fi是個(gè)體適應(yīng)度;Q是種群的大小.

(14)
(15)
其中Pc為交叉率,即:
(16)

c.變異:變異操作主要用于防止群體收斂到局部最優(yōu)解.變異算法為
(17)
其中δ∈[0,1]為均勻分布的隨機(jī)數(shù),pm為變異率,即
(18)

(4)獲取樣本
訓(xùn)練樣本對(duì)小波神經(jīng)網(wǎng)絡(luò)的辨識(shí)能力是至關(guān)重要的, 為了讓網(wǎng)絡(luò)更好的逼近實(shí)際系統(tǒng), 讓電機(jī)處于不同的狀態(tài)以獲得不同的訓(xùn)練數(shù)據(jù).可以調(diào)節(jié)電機(jī)的轉(zhuǎn)速, 使其逐漸升高, 最大限度的覆蓋電機(jī)運(yùn)行范圍.
3 仿真分析
為了使網(wǎng)絡(luò)預(yù)測(cè)器的輸出轉(zhuǎn)角達(dá)到期望值,先對(duì)轉(zhuǎn)角預(yù)測(cè)器中的小波神經(jīng)網(wǎng)絡(luò)進(jìn)行離線訓(xùn)練,將遺傳算法應(yīng)用于小波神經(jīng)網(wǎng)絡(luò)對(duì)權(quán)值進(jìn)行調(diào)整,從而達(dá)到網(wǎng)絡(luò)訓(xùn)練的目的.調(diào)節(jié)電機(jī)轉(zhuǎn)速使其工作在不同狀態(tài)下以獲得不同的訓(xùn)練數(shù)據(jù),使網(wǎng)絡(luò)很好地逼近實(shí)際系統(tǒng),將處理好的數(shù)據(jù)輸入轉(zhuǎn)角預(yù)測(cè)器,經(jīng)反復(fù)訓(xùn)練,直到達(dá)到目標(biāo)函數(shù)的要求為止.離線訓(xùn)練完后,便可以基本確定wi、wij、ai和bi,進(jìn)而可進(jìn)行電機(jī)轉(zhuǎn)角的預(yù)測(cè).
基于上述原理,搭建無(wú)刷直流電機(jī)控制系統(tǒng)框圖如圖2所示.在MATLAB中搭建無(wú)刷直流電機(jī)無(wú)位置傳感器控制系統(tǒng)對(duì)轉(zhuǎn)子位置進(jìn)行辨識(shí),系統(tǒng)仿真模型如圖3所示,其中的直流無(wú)刷電機(jī)參數(shù)如下:額定電壓:24 V,額定轉(zhuǎn)速:3 000 r/min,負(fù)載轉(zhuǎn)矩:0.5 N·m.
以三個(gè)線電壓Uab、Ubc、Uca作為小波神經(jīng)網(wǎng)絡(luò)的輸入,得到轉(zhuǎn)子空間位置仿真曲線如圖4和圖5所示,圖6為電機(jī)轉(zhuǎn)角誤差.由以上仿真波形可知,電機(jī)在啟動(dòng)階段預(yù)測(cè)轉(zhuǎn)角誤差比較大,在穩(wěn)定運(yùn)行階段預(yù)測(cè)轉(zhuǎn)角誤差比較小,驗(yàn)證了利用小波神經(jīng)網(wǎng)絡(luò)來(lái)控制電機(jī)換向的可行性和優(yōu)越性.
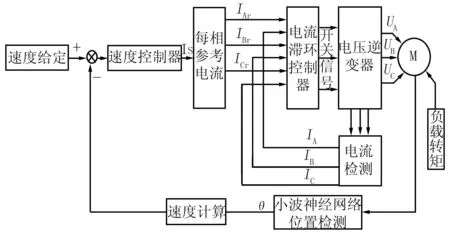
圖2 無(wú)刷直流電機(jī)控制系統(tǒng)框圖
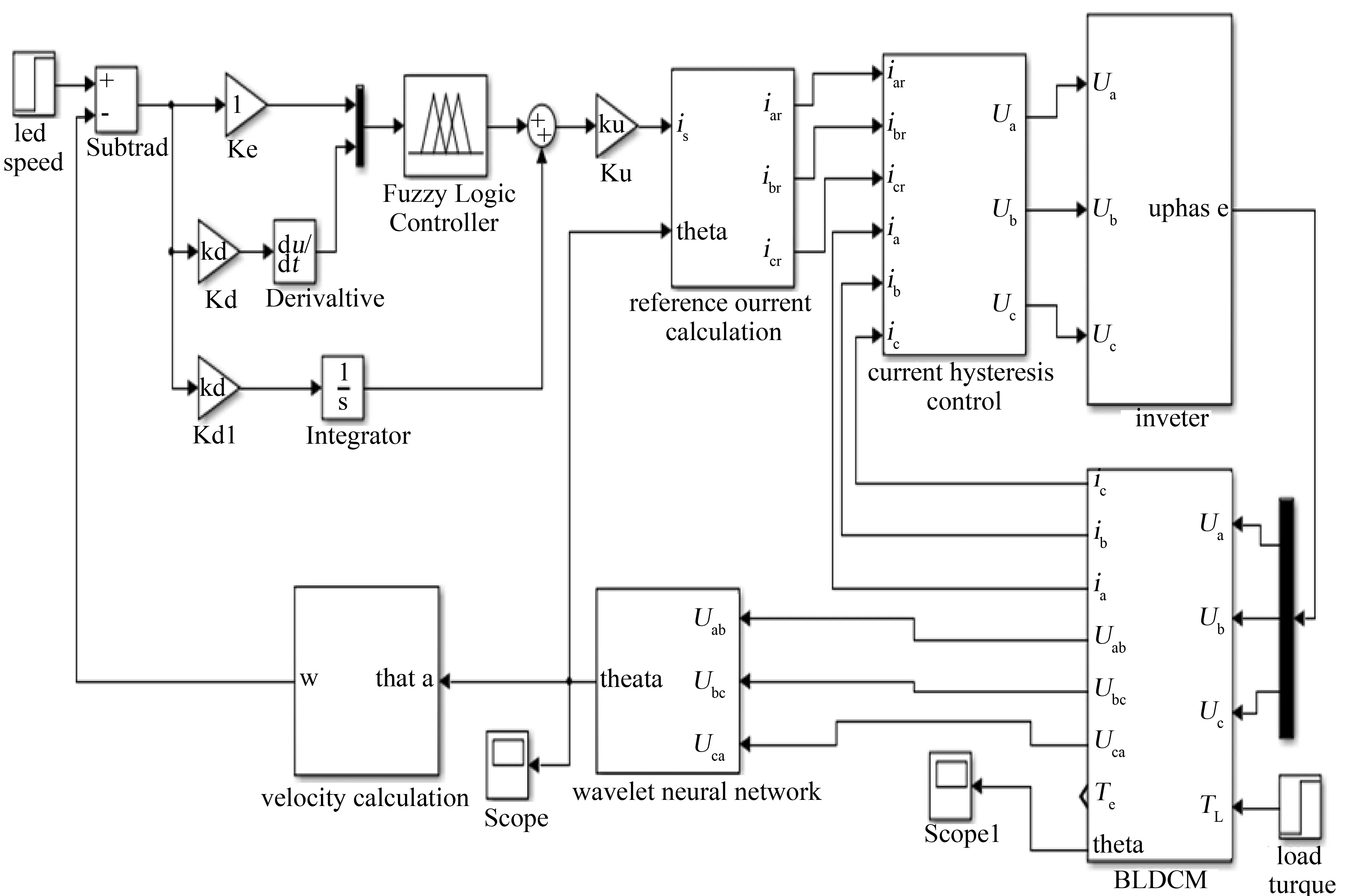
圖3 系統(tǒng)仿真模型
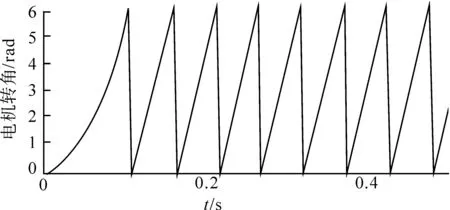
圖4 預(yù)測(cè)轉(zhuǎn)角
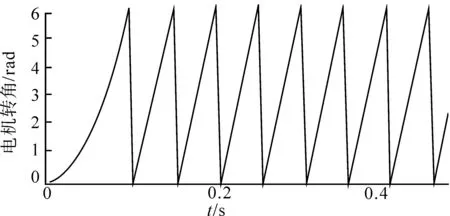
圖5 小波神經(jīng)網(wǎng)絡(luò)輸出轉(zhuǎn)角
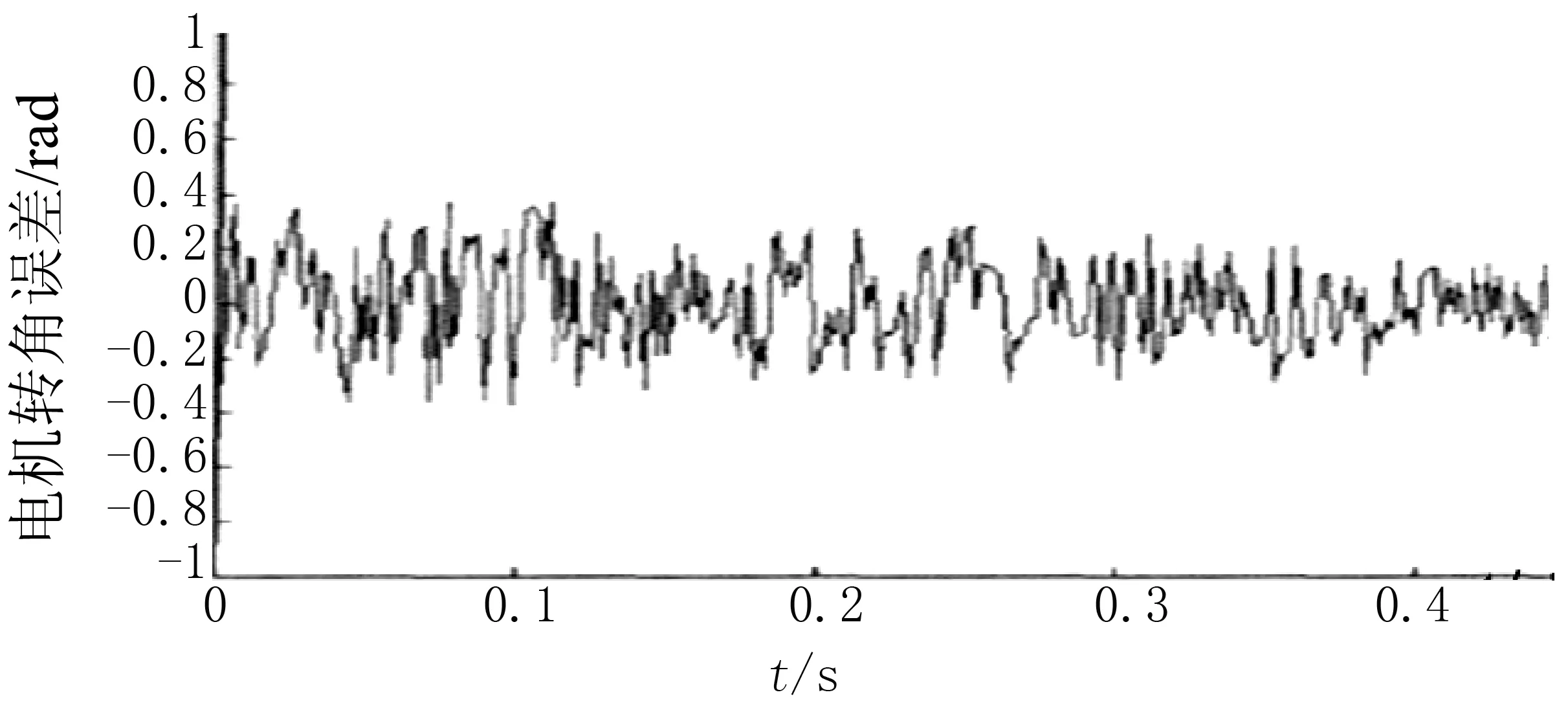
圖6 電機(jī)轉(zhuǎn)角誤差
4 結(jié) 語(yǔ)
以上分析了直流無(wú)刷電機(jī)轉(zhuǎn)子位置檢測(cè)原理,提出了一種基于自適應(yīng)小波神經(jīng)網(wǎng)絡(luò)的轉(zhuǎn)子位置檢測(cè)方法,該方法具有良好的自適應(yīng)性和非線性逼近能力,可以快速準(zhǔn)確的檢測(cè)電機(jī)轉(zhuǎn)子位置,從而為無(wú)刷直流電機(jī)提供準(zhǔn)確的換向信號(hào).通過(guò)仿真驗(yàn)證了該方案的可行性和優(yōu)越性.
致 謝
本工作得到了甘肅省自然科學(xué)基金委員會(huì)提供的資金支持.在此致以衷心的感謝!
;
[1] 夏長(zhǎng)亮,文德,范娟.基于RBF 神經(jīng)網(wǎng)絡(luò)的無(wú)刷直流電機(jī)無(wú)位置傳感器控制[J].電工技術(shù)學(xué)報(bào), 2002, 17 (3 ): 26-29.
XIA Chang-liang, WEN De, FAN Juan.Based on RBF neural network position sensorless control for brushless DC motors[J]. Transactions of China Electrotechnical Society, 2002, 17 (3): 26-29. (in Chinese)
[2] 程啟明, 王勇浩. 基于小波神經(jīng)網(wǎng)絡(luò)的控制方法及其應(yīng)用研究[J].工業(yè)儀表與自動(dòng)化裝置, 2004(5): 6-9.
CHENG Qi-ming, WANG Yong-hao .A study on the control method and its application based on wavelet neural network[J]. Industrial Instrumentation and Automation, 2004(5): 6-9. (in Chinese)
[3] 李天舒,劉軍.無(wú)刷直流電動(dòng)機(jī)的反電勢(shì)過(guò)零檢測(cè)法研究[J].微電機(jī),2007(3):34-36.
LI Tian-shu ,LIU Jun. Brushless dc motor the back emf of the zero test study [J]. Journal of Micromotor, 2007 (3) : 34-36.(in Chinese)
[4] 李自成,程善美,秦憶.線反電動(dòng)勢(shì)檢測(cè)無(wú)刷直流電機(jī)轉(zhuǎn)子位置方法[J].電機(jī)與控制學(xué)報(bào),2010,12(14):96-100.
LI Zi-cheng, CHEN Shan-mei,QIN Yi. Line counter electromotive force detection rotor position method for brushless dc motor [J]. Journal of Motor and Control, 2010, 12 (14) : 96-100.(in Chinese)
[5] JANG G H,PARK J H, CHANG J H. Position detection and start-up algorithm of a rotor in a sensorless BLDC motor utilizing inductance variation[J]. IEE Proc Electr Power Appl, 2002, 149(2): 137-142.
[6] OGASAWARA S, AKAGI H. An approach to position sensorless drive for brushlesss DC motors[J]. IEEE Trans Ind Application, 1991, 27(5): 928-933.
[7] 趙學(xué)智,鄒春華.小波神經(jīng)網(wǎng)絡(luò)的參數(shù)初始化研究[J]. 華南理工大學(xué)學(xué)報(bào):自然科學(xué)版, 2003, 31 (2): 77-79.
ZHAO Xue-zhi, ZOU Chun-hua. Research on the initialization of paramete rs of wavelet neural networks[J]. Journal of South China University of Technology:Natural Science Edition, 2003, 31 (2): 77-79. (in Chinese)
[8] 韋鯤,任軍軍,張仲超.一種新的直流無(wú)刷電機(jī)的無(wú)傳感器控制方法[J].電力電子技術(shù),2004,38(3): 70- 73.
WEI Kun,REN Jun-jun,ZHANG Zhong-chao. A new sensorless control method for brushless dc motor[J]. Power Electronic Technology,2004,38(3): 70- 73.(in Chinese)
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48