時延估計的聲源定位算法及MATLAB實現
2014-02-27 02:47:38陳向陽
武漢工程大學學報 2014年10期
關鍵詞:信號
陳向陽,劉 松,劉 培,徐 瑩,沈 超
1.武漢工程大學計算機科學與工程學院;2.郵電與信息工程學院,湖北 武漢 430074;3.湖北省檔案局(館)科技處, 湖北 武漢 430071
0 引 言
自20世紀70年代起傳聲器陣列開始用于語音信號處理以來,到目前為止已經設計出各種各樣的聲源定位技術[1].其中尤其是基于到達時間延遲的聲源定位技術因其良好的實時性、計算量也不大而成為目前研究的熱點之一.基于到達時間延遲[2]的聲源定位方法需要先估算出聲源與傳聲器陣列各陣元之間的相對時差,然后根據得到的時差推導計算聲源至各陣元之間的距離之差,最后再利用搜索算法或幾何算法得到聲源所處的位置.故其實現可分為兩步進行,即第一步估算出聲音信號至傳聲器陣元之間的相對時間延遲,候選實現算法有:廣義互相關函數法[3],最小均方(LMS)自適應濾波算法[4];第二步再利用所得的延遲值進行數學建模并利用陣元空間位置信息進行定位,具體實現算法有角度距離定位算法[5]、球形差值定位算法[6].通過對已知各種算法研究,結果發現選擇改進的廣義互相關算法并且與球形差值定位技術結合使用能得到更好的定位效果.
1 時延估計
1.1 廣義互相關函數法
假定聲源信號表達式如式(1)、(2)
x1(n)=a1s(n-τ1)+w1(n)
(1)
x2(n)=a2s(n-τ2)+w2(n)
(2)
這里使用s(n)來表示聲源信號,利用a1、a2來表達聲波從聲源到傳聲器的傳播衰減系數.而利用τ1、τ2來表達聲源傳播到兩部傳聲器時所需要的時間,而w1(n)、w2(n)則代表高斯白噪聲[7],并且s(n)與w1(n)、w2(n)是不相關[8-9]的.
利用求兩信號之間的互相關函數來實現廣義互相關函數.兩信號之間的相對時延就是在這種互相關函數的峰值位置處.從聲源至兩臺麥克風的信號x1(n)和x2(n) 的互相關函數R12(τ)可表示為
R12(τ)=E(x1(n)x2(n-τ))
(3)
將式(1)和(2)代入(3)式后便得到
R12(τ)=a1a2E(s(n-τ1)s(n-τ2-τ))+a1E(s(n-τ1)w2(n-τ))+
a2E(s(n-τ2-τ)w1(n))+E(w2(n)w2(n-τ))
(4)
因為w1(n)和w2(n)是不相關的高斯白噪聲,s(n)和w(n)也是不相關的隨機信號,故由式(4)得
R12(τ)=E(a1a2s(n-τ1)s(n-τ2-τ))=a1a2Rs(τ-(τ1-τ2))
(5)
利用相關函數的性質就可以得到,當τ=τ12=τ1-τ2時R12(τ)便能夠取得最大值.因此求得R12(τ)的最大值處所對應的τ值,其實就是兩個麥克風之間的時延τ12.
利用互功率譜和互相關函數之間的關系就可以得到式(6):

(6)
其中G12(ω)則代表麥克信號x1(n)和x2(n)之間的互功率譜.
但是由于語音與噪聲的短時間處理可能導致出現R12(τ)的峰值不夠突出,由此導致時延τ估計精確度的下降.為了能夠銳化得到R12(τ)的峰值,利用信號和噪聲的先驗知識,可以在頻域內對互功率譜G12(ω)進行加權處理來抑制噪聲與混響部分的不利影響.然后再進行反變換到時域中,如此就能夠得到廣義互相關函數(GCC),即
(7)

1.2 最小均方(LMS)自適應濾波方法
假設已知在自適應濾波器[10]中所包含的輸入信號分別是X(n)和d(n)以及輸出信號分別為y(n)和e(n),其中X(n)能夠利用參數可調整數字濾波器中wn(n)的加權分量,以便逐漸逼近所期望的信號d(n),從而得到輸出響應;并且進一步將它與參考信號d(n)進行對比,最終產生誤差信號e(n),e(n)能夠利用某種自適應算法對濾波器參數[11]作出改變,以便使e(n)的均方值能夠達到最小化.
e(n)=d(n-ρ)-y(n)
(8)
(9)
hm(n+1)=hm(n)+μe(n)x(n-m)
(10)
其中m=-p,-p+1,…p-1,p.
2 定位算法
2.1 角度距離定位算法
角度距離定位算法[12]最重要內容的一部分就是:利用聲源與兩個麥克風之間的距離差,以及兩麥克風之間的距離估計出聲源與這兩麥克風所在直線的夾角[13]由式(11)表示
(11)
然后,由于麥克風擺放成一定的幾何形狀,根據幾何形狀中的幾何公式,以聲源到麥克風之間的距離差以及麥克風之間的距離作為輸入變量,就可以求出聲源到坐標原點之間的距離.最后再根據所得出的距離與角度即可以求出聲源在坐標軸中的坐標.模擬實驗中至少需要有4個麥克風,坐標原點放置1個,至少有1個坐標軸上除了原點的麥克風之外還應該放置有2個相對原點對稱的麥克風,這樣做是為了能夠計算出聲源到原點之間的距離,而且計算量很小.除了麥克風的擺放問題,模擬試驗中聲源到麥克風之間的距離差是有正負之分的,所以在仿真實驗中一定要使之一一對應,不然就會得到錯誤的結果.
2.2 球形插值法
球形插值法[14]中的主要計算公式如式(12):
(12)
其中Ri=|ri|,Rs=|rs|,利用ri表示mj至mi之間的矢量,利用rs表示mj至聲音源S之間的矢量,利用dij表示聲音源S至傳聲器mi、mj之間的距離差值.在該算法中使用了9個麥克風,在坐標原點處放置的麥克風作為參照麥克風,在前邊得出了另外8個麥克風與參照麥克風之間的聲源距離差之后,就會有8個參數不同的公式(12)組成的方程組.在解方程組時需要使用最小二乘法,通過它可以直接計算出聲源的三維坐標.該算法得到的精確度非常高,在1萬米的數量級上的相對誤差是百分之零點零幾,在10萬米時產生的誤差也只有1.4%左右,這個距離和誤差程度是可以接受的.此外,在仿真中針對不同的麥克風數量進行了大量實驗,結果發現至少要使用5個麥克風才會有相對精確的測量值.總之仿真結果說明了該方法對麥克風的數量是具有一定限制的.
3 廣義互相關函數時延估計法改進后的相位變換加權函數
針對前述難以選擇加權函數問題,下面對廣義互相關函數(GCC)時延估計法提出改進方法.首先考慮在Gw1w2(ω)不為零時,應用中就能夠估計出無音階段的噪聲互相關函數R(w1w2)(τ),也就是R12(τ)-Rw1w2(τ),然后再將噪聲的互相關函數從信號的互相關函數中去除掉,由此削弱因噪聲帶來的不利影響.其次針對在房間中出現的混響現象,可以將G12(ω)分解為兩個成分: 直接成分和反射成分[9].參見式(13)
G12(ω)=a1a2Gss(ω)e-iωτ12+
(13)
由于PHAT加權函數的分母|G12(ω)|不等于a1a2Gss(ω),因此不能確保對e-jωτ12分量的白化作用.因此,考慮修正PHAT加權函數,即乘以加權因子γ,以保證|γ|G12(ω)|=a1a2Gss(ω),由此一來便能起到較好的抗混響效應.加權因子γ實質上就是直接分量占功率譜的比例.可以利用房間的混響時間來估計出直接分量占據整個功率譜的比例,由此便得到加權因子γ.

(14)
即在信噪比較低時,就對頻域給予一定的信噪比加權.在利用兩路信號求解某個時延時,PHAT加權函數互功率譜法中需計算3次快速傅里葉變換.因此其運算量相對還是比較低的.但具有抑制噪聲作用,因此在實際定位系統中,得到改進后的PHAT加權函數法得到了很好的應用.
由于在仿真模擬實驗中針對聲源信號的噪音是人為加上的,所以要得出只有噪聲的信號是非常容易的,那么在得到了噪音的自相關函數[13]之后,就可以在信號的互相關函數中減掉該部分,經過仿真之后發現結果的確有所改進,但是效果還不夠明顯.考慮到信號與噪音可能并不是完全的不相關,也就是說信號和噪音的互相關性可能也會產生一定的影響,于是可用信號互相關函數減去一個分量,即
(15)
其中rnoise是噪音的相關函數,rxn與ryn是噪音和兩個信號的互相關函數, 是一個比例系數體現的是這三個分量之間的比例.經過多次仿真試驗發現當k為0.3時消除噪音的效果最佳.
4 模擬仿真結果
改進前廣義互相關函數算法的仿真結果如圖1所示.改進前10db的結果如圖2所示.
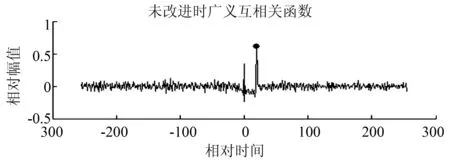
圖1信噪比為20db時的互相關函數圖
Fig.1 The cross-correlation function diagram with signal-to-noise ratio=20dB
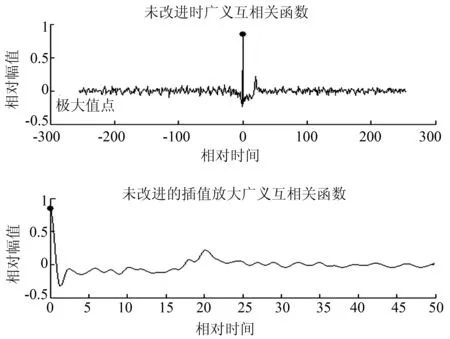
圖2 信噪比為10db時的互相關函數圖
在10db時算法經改進后的結果如圖3所示.由圖2與圖3的比較可以得知改進算法后的方法對噪音的抑制效果更好.
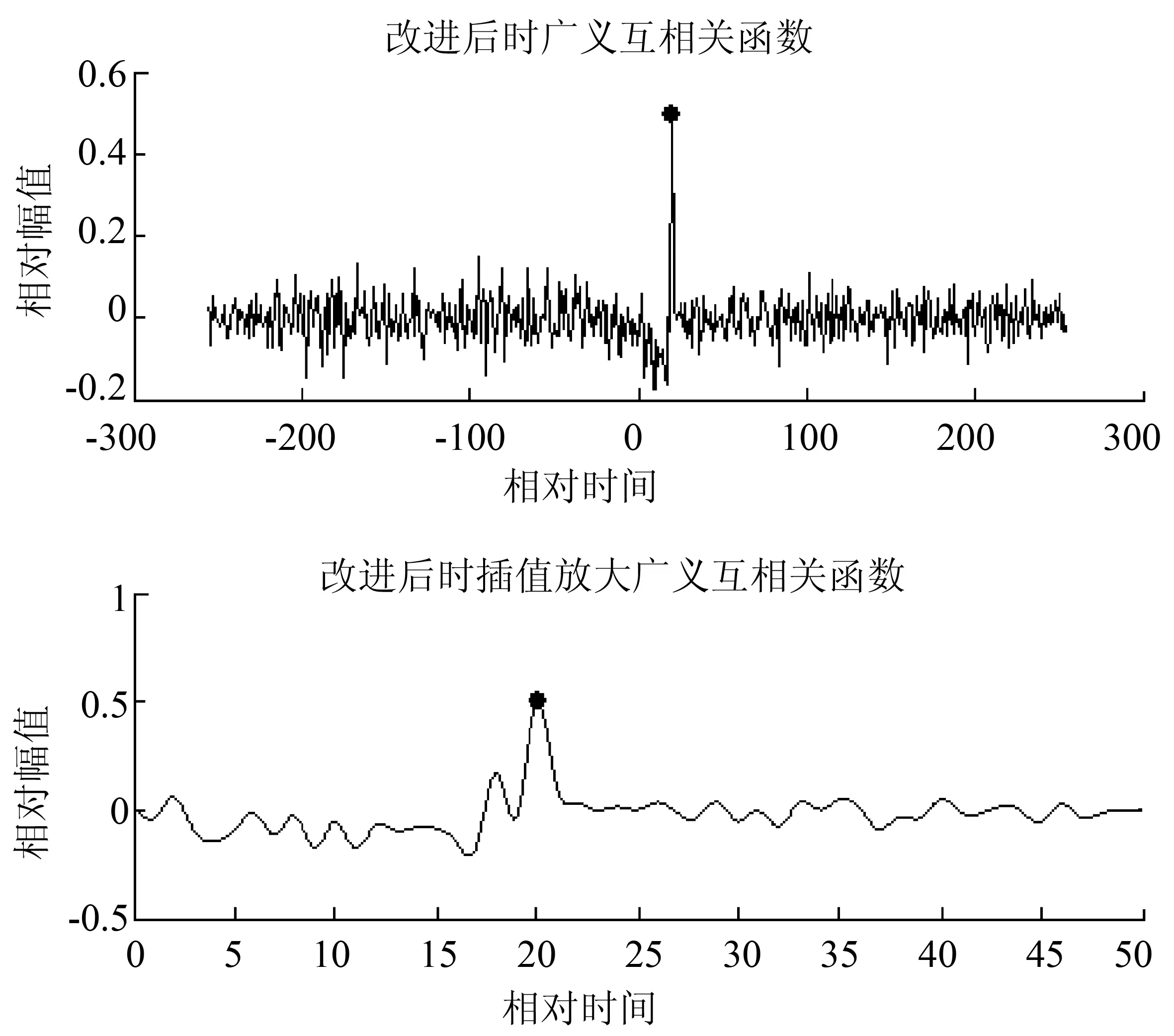
圖3 改進后信噪比為10db互相關函數圖
在20db時使用最小均方(LMS)自適應算法得到的結果如圖3~4所示.從圖3~4中可以看出在20db時,時延5處出現明顯的峰值.上述仿真結果驗證了該方法的正確性.
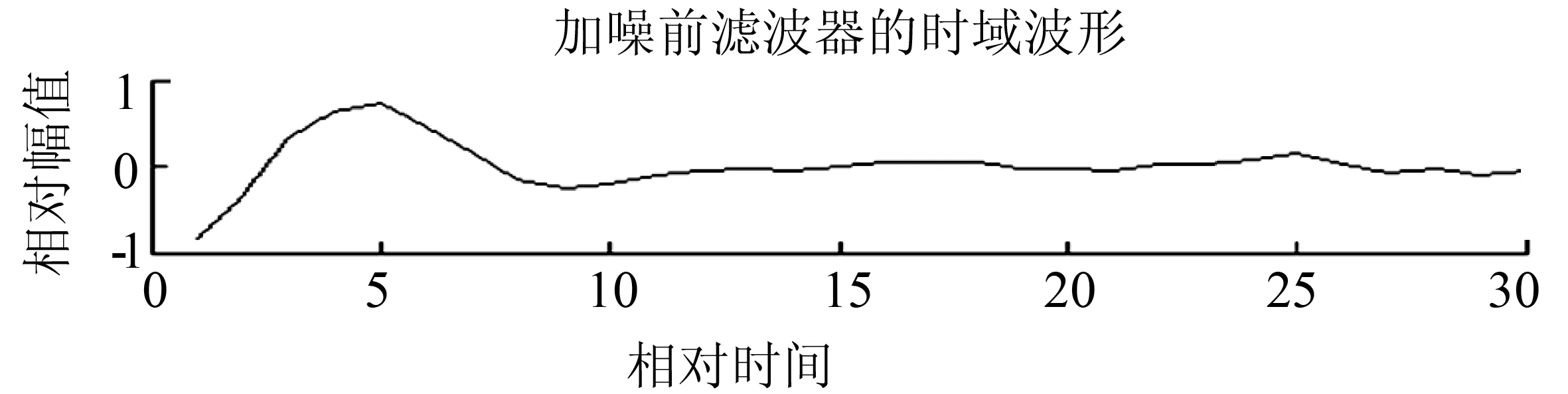
圖4 信噪比為20的權值時域圖
在10db時該方法的結果如圖5所示.由圖5可以看出,自適應算法在信噪比為10db時已經出現較多的峰值,而且在正確的時延處峰值處略有偏移.所以通過以上實驗仿真的結果可以看出利用改進后的廣義互相關函數算法要比自適應算法具有更好的抑制噪音效果.
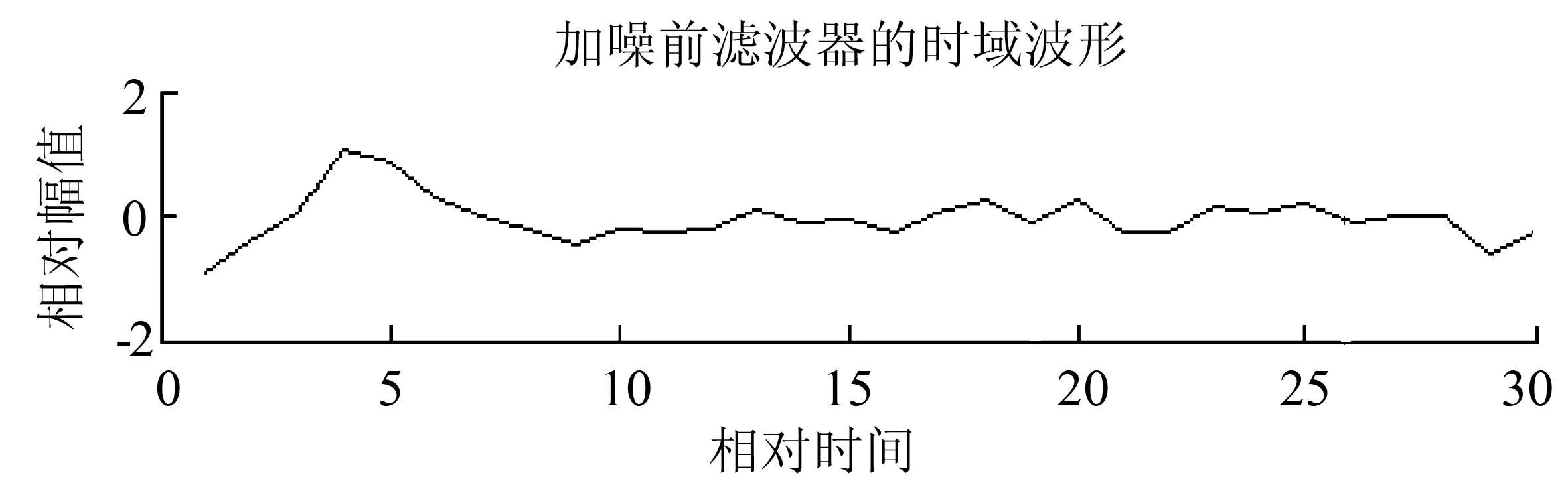
圖5 信噪比為10的權值時域圖
5 總結與展望
通過對不同聲源定位中的到達時間延遲算法以及定位算法的對比,以及在Matlab仿真軟件上的模擬,說明改進的互相關函數法相對于自適應算法具有更好的抗噪能力,球形插值法也具有更精確的定位能力,所以建議實際應用中使用這兩種算法能夠實現更精確的聲源定位.同時由于諸多限制,仿真模擬試驗中還有諸多問題有待解決,如在互相關函數中減去噪音成分的比例具體應該是多少,傅里葉變換對互相關函數的影響到應該是什么樣的,傅里葉變化的點數與信號的采樣點數的取值是否有一定的要求,才能使得最后的峰值更加明顯等問題.
致 謝
本文得到了湖北省教育科學"十二五"規劃2013年度立項課題:地方性高校新興交叉學科建設的研究——以網絡科學為例(項目編號2013B060)的資助,在此表示衷心的感謝.
[1] 李承智,曲天書,吳璽宏.一種改進的AEDA聲源定位及跟蹤算法[J].北京大學學報:自然科學版,2005,41(5):809-814.
LI Chengzhi,Qu Tianshu,WU Xihong.A modified AEDA algorithm for sound source localization and tracking[J]. Acta Scientiarum Naturalium Universitatis Pekinensis, 2005,41(5):809-814.(in chineses)
[2] 郭蘭申. 面向反恐領域基于多源信息融合的機器人感知系統研究[D].天津:河北工業大學,2006.
GUO Lanshen. Research on robot perception system for anti-terrorism based on multi-source information fusion[D]. Tianjin:Hebei University of Technology,2006. (in chineses)
[3] 金乃高,陳喆. 基于分層采樣粒子濾波的麥克風陣列說話人跟蹤法[J]. 電子學報,2008,36(1): 194-198.
JIN Nai-gao,CHEN Zhe. Microphone array speaker tracking using layered sampling particle filtering[J]. ACTA Electronica Sinica,2008,36(1):194-198. (in chineses)
[4] 殷福亮,陳喆. 基于加權子空間擬合的聲源定位與跟蹤方法[J]. 電子與信息學報,2008, 30(9):2134-2137.
YIN Fu-liang, CHEN Zhe. Weighted subspace fitting sound source localization method based on particle filtering[J]. Journal of Electronics & Information Technology, 2008, 30(9):2134-2137.(in chineses)
[5] 蔡衛平. 基于麥克風陣列的聲源定位與跟蹤算法研究[D].南京:東南大學,2010.
CAI Weiping. Research and tracking algorithm for sound source localization based on microphone array[D].Nanjing: Southeast University,2010. (in chineses)
[6] 馮道寧,王浩. 基于麥克風陣列和虛擬儀器的聲源定位[J]. 計算機工程與應用,2012, 48(21) : 130-132.
FENG Dao-ning, WANG Hao. Speech source localization based on microphone arrays and labview[J]. CEA, 2012, 48(21): 130-132. (in chineses)
[7] 邵懷宗,林靜然,彭啟琮,等. 基于麥克風陣列的聲源定位研究[J]. 云南民族大學學報,2004,13(4):256-259.
SHAO Huaizong,LIN jingrui,PENG Qicong ,et al. Study on localization for speech based on microphone array[J]. Journal of Yunnan Nationalities University,2004, 13(4):256-259. (in chineses)
[8] 陸曉燕,基于麥克風陣列實現聲源定位[D]. 大連:大連理工大學,2003.
LU Xiaoyan, Implementation of acoustic source localization based on microphone array[D].Dalian: Dalian University of Technology,2003. (in chineses)
[9] 周浩祥.基于麥克風陣列的聲源定位方法研究[D] . 大連:大連理工大學,2002.
ZHOU Haoxiang. Research on acoustic source localization methods based on microphone array[D].Dalian:Dalian University of Technology,2003. (in chineses)
[10] 嚴素清,黃冰. 傳聲器陣列的聲源定位研究[J]. 電聲技術,2004(12):27-30.
YAN Suqing,HUANG Bing. Study on acoustic source localization based on microphone arrays[J].Loudspeaker And Microphone, 2004(12):27-30. (in chineses)
[11] YOUN D H, AHMED N, CARTER G C. On using the LMS algorithm for time delay estimation[J]. IEEE Transactions on Acoustics, Speech and Signal Processing, 1992,30(5):798-801.
[12] JIE Huang, Kume K, Saji A. et al. Robotic spatial sound socalization and its 3D sound human Interface[C]//First International Symposium on Cyber Worlds (CW2002),Tokyo:2002:191-197.
[13] 王宏禹,邱天爽. 自適應噪聲抵消和時間延遲估計[D]. 大連:大連理工大學出版社,1999.
WANG Hongyu,QIU Tianshuang. Adaptive noise cancellation and time delay estimation[D].Dalian: Dalian University of Technology press,1999. (in chineses)
[14] JIE Huang, OHNISHI N, SUGIE N. A biomimetic system for localization and separation of multiple sound sources instrumentation and measurement[J]. IEEE Transactions on Volume,1995,44(3):733-738.
[15] SMITH J O, ABEL J S. Closed-form least-squares source location estimation from range difference measurements[J]. IEEE Transactions on Acoustics, Speech and Signal Processing,1987,35(12):1661-1669.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06