火箭自導(dǎo)深彈齊射方法研究
2014-02-27 06:24:12趙丹輝何心怡陳兆峰
水下無(wú)人系統(tǒng)學(xué)報(bào) 2014年3期
趙丹輝, 何心怡, 陳兆峰, 朱 濱
?
火箭自導(dǎo)深彈齊射方法研究
趙丹輝, 何心怡, 陳兆峰, 朱 濱
(海軍裝備研究院, 北京, 100161)
以“海矛”火箭自導(dǎo)深彈為原型, 根據(jù)公開(kāi)報(bào)道的參數(shù)結(jié)合一般性的假設(shè), 建立了虛擬火箭自導(dǎo)深彈的彈道模型和自導(dǎo)檢測(cè)模型, 確定了相應(yīng)的齊射方法, 并以所建立的模型和確定的齊射方法為基礎(chǔ)對(duì)多枚深彈的齊射命中概率進(jìn)行了仿真及比較, 結(jié)果表明, 在典型條件下, 3枚齊射可達(dá)到最優(yōu)費(fèi)效比; 目標(biāo)距離越近、機(jī)動(dòng)程度越大, 齊射命中概率越高。
火箭自導(dǎo)深彈; 多枚齊射; 齊射方法; 最優(yōu)費(fèi)效比
0 引言
火箭自導(dǎo)深彈是一種新型近程反潛武器, 主要用于淺海反潛, 并可兼顧深海作戰(zhàn), 具備自導(dǎo)功能, 作戰(zhàn)能力較傳統(tǒng)無(wú)自導(dǎo)火箭深彈大幅提升。目前西歐和俄羅斯等各海軍強(qiáng)國(guó)都研制了符合本國(guó)作戰(zhàn)需求的火箭自導(dǎo)深彈, 尤其是德國(guó)的“海矛”火箭自導(dǎo)深彈, 可利用獨(dú)特的舷側(cè)陣自導(dǎo)系統(tǒng)在水平360°范圍內(nèi)搜索探測(cè)目標(biāo), 攻潛方式非常新穎, 代表了目前火箭自導(dǎo)深彈發(fā)展的最高水平, 阿特拉斯電子公司的大量試驗(yàn)驗(yàn)證了其具有較高的淺海反潛效能[1], 國(guó)內(nèi)外對(duì)此類火箭自導(dǎo)深彈均很關(guān)注。
水面艦艇使用火箭自導(dǎo)深彈攻潛時(shí), 通常向目標(biāo)實(shí)施多枚齊射, 齊射方法的科學(xué)與否將直接對(duì)命中概率產(chǎn)生影響。因此, 有必要對(duì)火箭自導(dǎo)深彈的齊射方法進(jìn)行研究。文中以“海矛”為原型, 根據(jù)公開(kāi)報(bào)道的參數(shù)結(jié)合一般性的假設(shè), 建立了虛擬“海矛”類火箭自導(dǎo)深彈(以下簡(jiǎn)稱火箭自導(dǎo)深彈)的彈道模型和自導(dǎo)檢測(cè)模型, 研究給出了該武器的齊射方法, 并對(duì)其齊射命中概率進(jìn)行了仿真, 仿真結(jié)果表明, 所給出的齊射方法具有較高的命中概率, 可為此類武器的作戰(zhàn)使用提供參考。
1 火箭自導(dǎo)深彈基本情況介紹
以先進(jìn)的德國(guó)“海矛”為原型, 對(duì)火箭自導(dǎo)深彈作如下介紹[1]。
1.1 火箭自導(dǎo)深彈組成及結(jié)構(gòu)參數(shù)
如圖1所示, 火箭自導(dǎo)深彈全彈由助推器、空投附件和水下彈幾部分組成, 作為有效載荷的水下彈又由彈體、彈頂陣自導(dǎo)系統(tǒng)、舷側(cè)陣自導(dǎo)系統(tǒng)、控制系統(tǒng)、引信系統(tǒng)、動(dòng)力系統(tǒng)以及戰(zhàn)斗部等組成。水下彈長(zhǎng)度為900 mm, 彈徑124 mm, 質(zhì)量20 kg, 加上助推器, 長(zhǎng)度為2 300 mm, 質(zhì)量小于43 kg。

圖1 火箭自導(dǎo)深彈組成示意圖
1.2 火箭自導(dǎo)深彈攻潛過(guò)程
火箭自導(dǎo)深彈的攻潛過(guò)程按照功能可劃分為6個(gè)階段, 如圖2所示。
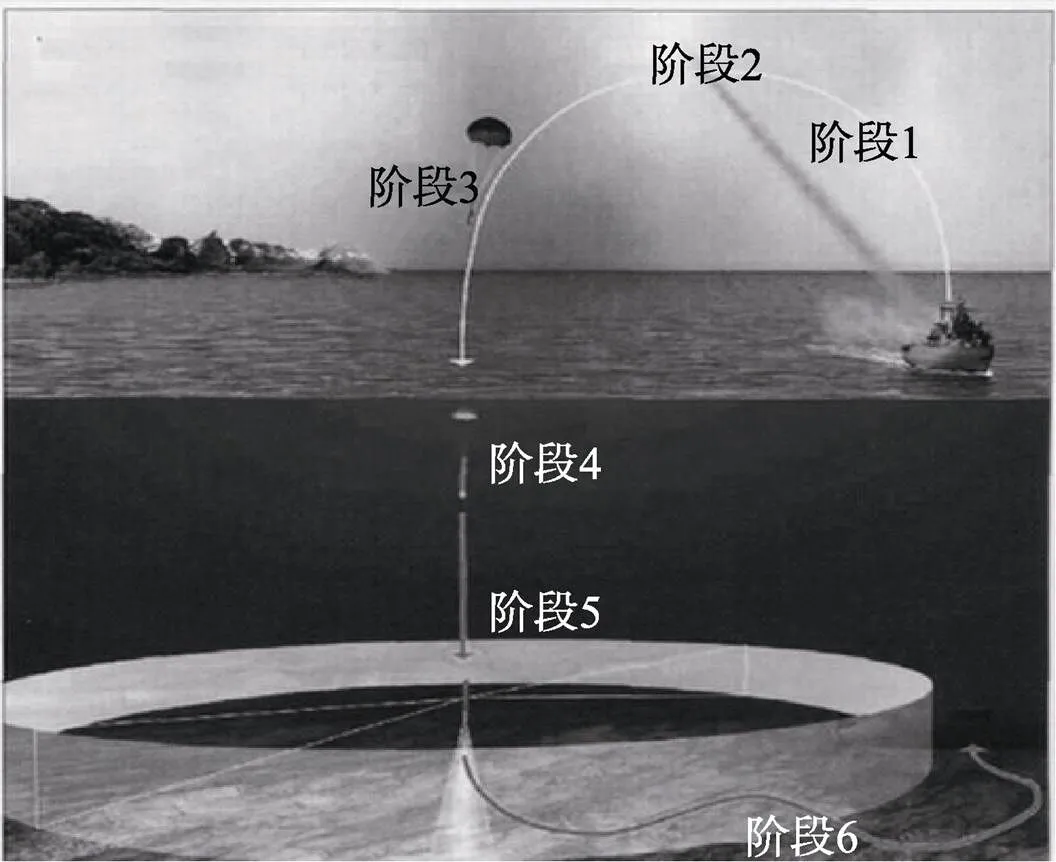
圖2 火箭自導(dǎo)深彈攻潛過(guò)程示意圖
階段1: 火箭自導(dǎo)深彈由水面艦艇發(fā)射, 在助推器作用下按照預(yù)先設(shè)定好的助飛彈道飛行(助飛段彈道)。
階段2: 助飛彈道結(jié)束后, 助推器分離, 空投附件動(dòng)作, 打開(kāi)第1個(gè)降落傘。
階段3: 水下彈在降落傘的作用下減速穩(wěn)定飛行, 以一定速度和姿態(tài)入水(彈傘段彈道)。
階段4: 入水后, 水下彈的速度將被第2個(gè)降落傘瞬時(shí)降低, 且彈體的縱軸在控制系統(tǒng)作用下, 快速修正到垂直方向(入水段彈道), 開(kāi)始勻慢速向下運(yùn)動(dòng)(準(zhǔn)懸停沉降段彈道)。
階段5: 在準(zhǔn)懸停沉降過(guò)程中, 舷側(cè)陣自導(dǎo)系統(tǒng)在水平360°范圍內(nèi)搜索目標(biāo)。為了降低海底和海面的界面混響, 該舷側(cè)陣自導(dǎo)系統(tǒng)的垂直搜索扇面很窄, 因此, 在探測(cè)到目標(biāo)時(shí)水下彈所在深度幾乎與目標(biāo)一致。
階段6: 舷側(cè)陣自導(dǎo)系統(tǒng)探測(cè)到目標(biāo)時(shí), 水下彈的動(dòng)力系統(tǒng)啟動(dòng), 同時(shí)控制系統(tǒng)操舵使彈體朝目標(biāo)傾斜轉(zhuǎn)向(傾斜轉(zhuǎn)向彈道), 轉(zhuǎn)為由彈頂陣自導(dǎo)系統(tǒng)搜索目標(biāo); 彈頂陣自導(dǎo)系統(tǒng)探測(cè)到目標(biāo)后, 水下彈將依據(jù)一定的導(dǎo)引律對(duì)目標(biāo)發(fā)起攻擊(導(dǎo)引攻擊段); 撞上目標(biāo)后, 觸發(fā)引信動(dòng)作引爆聚能戰(zhàn)斗部。
需要特別注意的是, 水下彈在準(zhǔn)懸停沉降時(shí), 彈頂陣自導(dǎo)系統(tǒng)僅作為回聲探測(cè)儀使用, 在淺海可以實(shí)時(shí)獲取深彈沉降位置與海底的距離, 并依此判斷水下彈是否在目標(biāo)的正上方, 實(shí)現(xiàn)對(duì)目標(biāo)“天頂”的攻擊。
2 彈道模型和自導(dǎo)檢測(cè)模型
根據(jù)公開(kāi)報(bào)道的“海矛”火箭自導(dǎo)深彈的參數(shù)和攻潛過(guò)程, 結(jié)合國(guó)內(nèi)相關(guān)研究得到的部分參數(shù)及一般性的假設(shè), 建立火箭自導(dǎo)深彈的彈道模型和自導(dǎo)檢測(cè)模型, 各模型中坐標(biāo)系的含義均與文獻(xiàn)[2]中相同。
2.1 彈道模型
總的來(lái)說(shuō),火箭自導(dǎo)深彈的彈道分為空中和水下兩段。其空中段彈道包括助飛段彈道和彈傘段彈道; 水下段彈道包括入水段彈道、準(zhǔn)懸停沉降段彈道、傾斜轉(zhuǎn)向段彈道和導(dǎo)引攻擊段彈道。
2.1.1 空中段彈道模型
建立地面坐標(biāo)系表示質(zhì)心在空間中的位置, 原點(diǎn)為發(fā)射位置。為了簡(jiǎn)化計(jì)算, 假設(shè)彈體運(yùn)動(dòng)過(guò)程中無(wú)傾斜和側(cè)向運(yùn)動(dòng), 在縱平面內(nèi)研究其空中段的彈道。
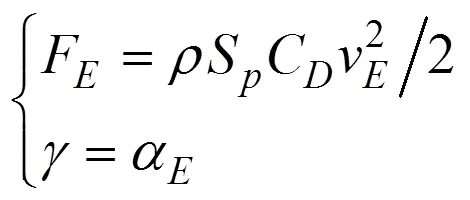
1) 助飛段彈道模型
助飛段彈道從火箭自導(dǎo)深彈發(fā)射開(kāi)始到助推器分離為止。除地面系外, 另建立彈道坐標(biāo)系, 研究該段質(zhì)心的運(yùn)動(dòng)情況。其助飛彈道方程為[3]

2) 彈傘段彈道模型
彈傘段彈道從助推器分離開(kāi)始到水下彈入水為止。除地面系和彈道系外, 另建立彈體坐標(biāo)系研究彈傘系統(tǒng)的位置及姿態(tài), 如圖3所示。

圖3 彈傘系統(tǒng)示意圖
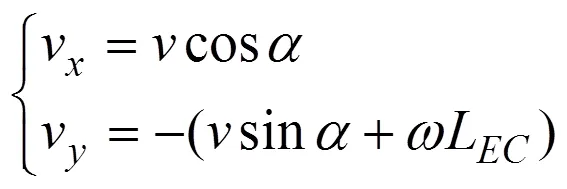
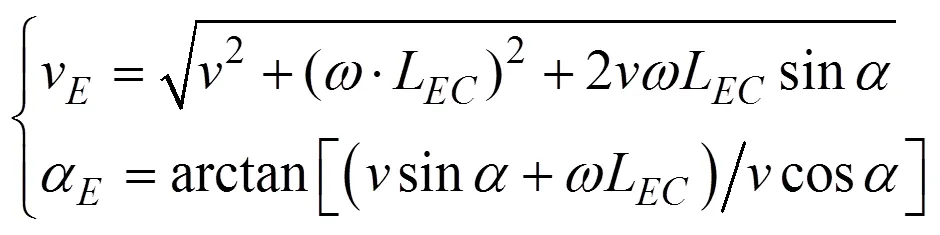
彈傘系統(tǒng)彈道方程為

2.1.2 水下段彈道模型
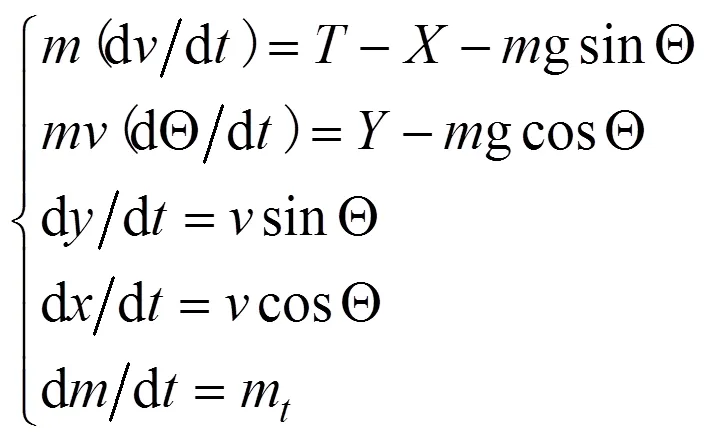
水下段彈道需要考慮水下彈所受到浮力的作用, 首先給出其縱平面內(nèi)質(zhì)點(diǎn)動(dòng)力學(xué)方程(地面坐標(biāo)系)。
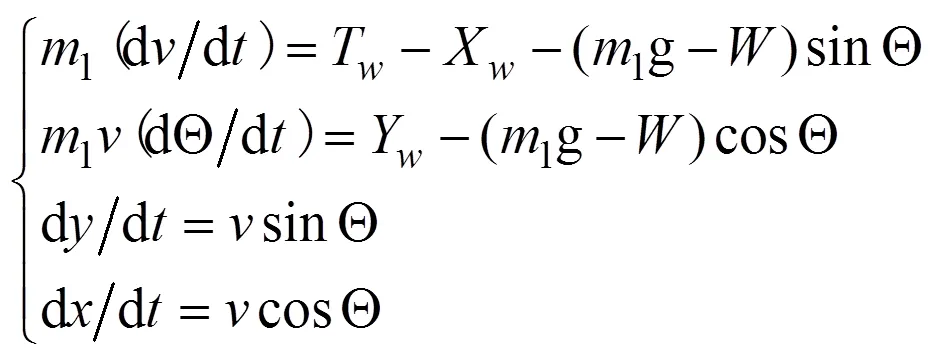
入水段、準(zhǔn)懸停沉降段、傾斜轉(zhuǎn)向段3個(gè)階段的水下彈道都可用式(6)中的微分方程通過(guò)數(shù)值方法計(jì)算, 只是不同階段各參數(shù)的取值和解微分方程時(shí)的初值不同而已。
1) 入水段彈道模型

2) 準(zhǔn)懸停沉降段彈道模型
準(zhǔn)懸停沉降段彈道從水下彈速度降為準(zhǔn)懸停沉降速度開(kāi)始到舷側(cè)陣自導(dǎo)系統(tǒng)探測(cè)到目標(biāo)為止。準(zhǔn)懸停沉降段同樣是無(wú)動(dòng)力段, 此階段水下彈所受到的負(fù)浮力=阻力, 彈道傾角始終為–90°, 即水下彈以入水段結(jié)束時(shí)的速度做勻速垂直向下的運(yùn)動(dòng)。
3) 傾斜轉(zhuǎn)向段彈道模型
傾斜轉(zhuǎn)向段彈道從舷側(cè)陣自導(dǎo)系統(tǒng)探測(cè)到目標(biāo)開(kāi)始到彈頂陣自導(dǎo)系統(tǒng)探測(cè)到目標(biāo)為止。在傾斜轉(zhuǎn)向段, 水下彈動(dòng)力系統(tǒng)啟動(dòng), 以一定的推力、轉(zhuǎn)彎半徑朝目標(biāo)傾斜轉(zhuǎn)向。將準(zhǔn)懸停沉降段結(jié)束時(shí)的參數(shù)作為初值, 求解式(6)的微分方程, 可以得到該段的彈道參數(shù)。
4) 導(dǎo)引攻擊段彈道模型
導(dǎo)引攻擊段彈道從彈頂陣自導(dǎo)系統(tǒng)探測(cè)到目標(biāo)開(kāi)始到水下彈撞上目標(biāo)或超過(guò)航程自毀為止。文中采用運(yùn)動(dòng)學(xué)模型和比例導(dǎo)引律研究水下彈的導(dǎo)引攻擊段彈道。比例導(dǎo)引律是指武器運(yùn)動(dòng)過(guò)程中速度矢量的轉(zhuǎn)動(dòng)角速度與目標(biāo)線的轉(zhuǎn)動(dòng)角速度成比例的一種導(dǎo)引方法。
圖4為自導(dǎo)深彈與目標(biāo)在一個(gè)縱平面內(nèi)的相對(duì)運(yùn)動(dòng)示意圖。
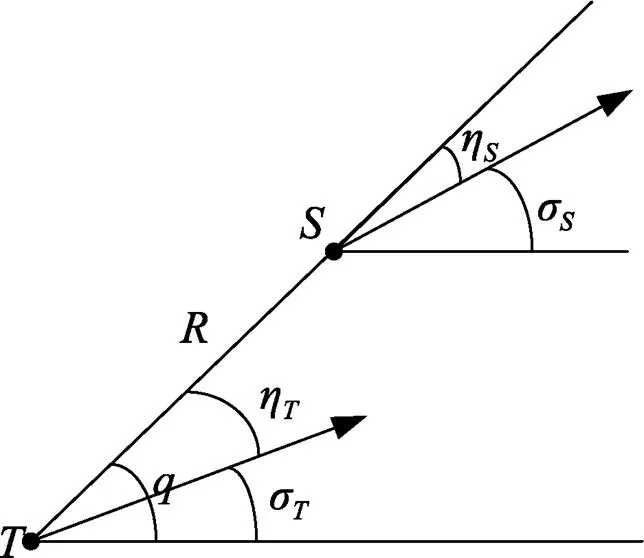
圖4 水下彈與目標(biāo)的相對(duì)運(yùn)動(dòng)

在一個(gè)縱平面內(nèi)彈目的相對(duì)運(yùn)動(dòng)方程為

比例導(dǎo)引律方程為
火箭自導(dǎo)深彈導(dǎo)引攻擊過(guò)程是在3D空間中進(jìn)行的, 為便于研究, 考慮到水下彈具有良好橫滾控制性能的前提下, 彈體的側(cè)向運(yùn)動(dòng)與縱向運(yùn)動(dòng)可以解耦, 因此可將3D空間運(yùn)動(dòng)投影到2個(gè)相互垂直的縱平面內(nèi), 利用上述模型在這2個(gè)平面內(nèi)分別進(jìn)行比例導(dǎo)引計(jì)算, 然后再合成到3D空間中, 即可得到對(duì)應(yīng)的3D導(dǎo)引攻擊彈道。
2.2 自導(dǎo)檢測(cè)模型
火箭自導(dǎo)深彈同時(shí)擁有舷側(cè)陣自導(dǎo)系統(tǒng)和彈頂陣自導(dǎo)系統(tǒng), 如圖5所示。在準(zhǔn)懸停沉降過(guò)程中水下彈利用舷側(cè)陣自導(dǎo)系統(tǒng)搜索目標(biāo), 發(fā)現(xiàn)目標(biāo)后彈體向目標(biāo)所在方位傾斜轉(zhuǎn)向時(shí), 水下彈轉(zhuǎn)為開(kāi)始利用彈頂陣自導(dǎo)系統(tǒng)搜索目標(biāo)。
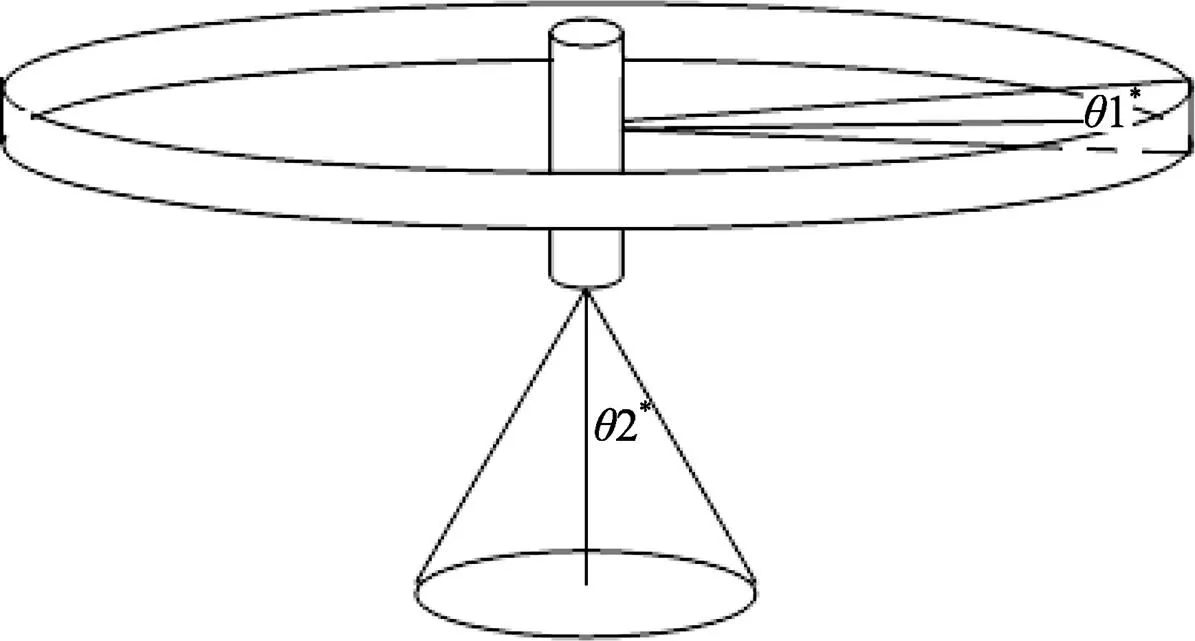
圖5 自導(dǎo)系統(tǒng)工作示意圖
設(shè)1,2分別為舷側(cè)陣和彈頂陣自導(dǎo)系統(tǒng)作用距離,1,2分別為舷側(cè)陣和彈頂陣自導(dǎo)扇面角,為目標(biāo)潛艇與水下彈距離,1,2分別為目標(biāo)在舷側(cè)陣和彈頂陣自導(dǎo)系統(tǒng)測(cè)量系中的角度, 在準(zhǔn)懸停沉降段, 若同時(shí)滿足約束條件≤1,1≤1, 則認(rèn)為舷側(cè)陣自導(dǎo)系統(tǒng)探測(cè)到目標(biāo), 在傾斜轉(zhuǎn)向段, 若同時(shí)滿足≤2,2≤2, 則認(rèn)為彈頂陣自導(dǎo)系統(tǒng)探測(cè)到目標(biāo), 彈頂陣探測(cè)到目標(biāo)后, 自導(dǎo)深彈將按照導(dǎo)引律向目標(biāo)運(yùn)動(dòng)。
3 火箭自導(dǎo)深彈齊射方法
3.1 基本射擊方法
對(duì)目標(biāo)提前點(diǎn)射擊和對(duì)目標(biāo)當(dāng)前點(diǎn)射擊是火箭自導(dǎo)深彈2種基本射擊方法[3]。
1) 對(duì)目標(biāo)提前點(diǎn)射擊法
火箭自導(dǎo)深彈發(fā)射時(shí)刻, 若探測(cè)設(shè)備此前一直保持對(duì)目標(biāo)的穩(wěn)定跟蹤, 并且火控系統(tǒng)已解算出目標(biāo)的航向、航速等運(yùn)動(dòng)要素, 可以對(duì)目標(biāo)提前點(diǎn)進(jìn)行射擊。
2) 對(duì)目標(biāo)當(dāng)前點(diǎn)射擊法
火箭自導(dǎo)深彈發(fā)射時(shí)刻, 火控系統(tǒng)未能及時(shí)解算或根本無(wú)法解算目標(biāo)運(yùn)動(dòng)要素, 我艦僅知道目標(biāo)潛艇的位置坐標(biāo)時(shí), 可以對(duì)目標(biāo)當(dāng)前點(diǎn)進(jìn)行射擊。
3.2 基本射擊方法比較與分析
表1從解目標(biāo)運(yùn)動(dòng)要素程度、反應(yīng)時(shí)間和命中概率3個(gè)方面對(duì)2種基本射擊方法進(jìn)行了比較。
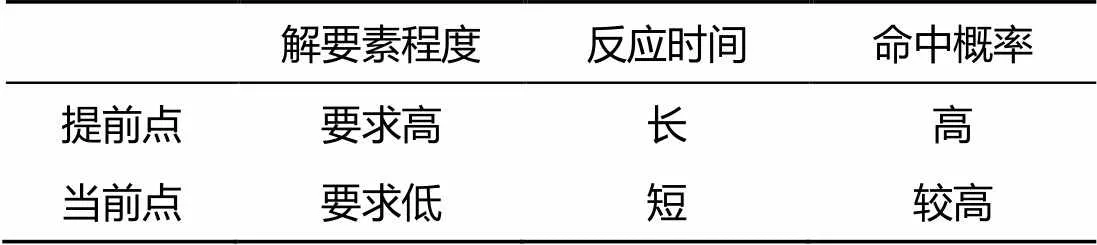
表1 基本射擊方法比較
對(duì)目標(biāo)提前點(diǎn)射擊雖然命中概率高, 但對(duì)火控系統(tǒng)要求也很高, 需要解算目標(biāo)運(yùn)動(dòng)要素并對(duì)目標(biāo)將要到達(dá)的位置進(jìn)行預(yù)測(cè), 往往需要幾分鐘的時(shí)間, 有時(shí)甚至根本無(wú)法解算, 達(dá)不到快速反應(yīng)的要求, 容易貽誤戰(zhàn)機(jī)。
對(duì)目標(biāo)當(dāng)前點(diǎn)射擊的命中概率不及提前點(diǎn)射擊高, 但對(duì)火控系統(tǒng)要求較低, 且不需要解算目標(biāo)運(yùn)動(dòng)要素并準(zhǔn)確預(yù)測(cè)目標(biāo)將要到達(dá)的位置, 可以大幅縮短反應(yīng)時(shí)間。
火箭自導(dǎo)深彈為近程反潛武器, 具有空中飛行速度快(遠(yuǎn)遠(yuǎn)大于潛艇的航速)的特點(diǎn), 發(fā)射后可以在很短的時(shí)間內(nèi)到達(dá)瞄準(zhǔn)點(diǎn)。為了最大程度地發(fā)揮其可快速攻擊的優(yōu)點(diǎn), 應(yīng)選擇對(duì)目標(biāo)當(dāng)前點(diǎn)射擊的方法實(shí)施攻潛, 同時(shí)可采取多枚齊射的方式彌補(bǔ)其命中概率低于提前點(diǎn)射擊法的不足。
3.3 當(dāng)前點(diǎn)齊射方法的提出
向目標(biāo)當(dāng)前點(diǎn)射擊時(shí), 對(duì)我方而言, 目標(biāo)是在火箭自導(dǎo)深彈運(yùn)動(dòng)過(guò)程中, 以未知的航速和航向駛離當(dāng)前點(diǎn)的, 形成了一個(gè)可能位置區(qū)域。因此, 目標(biāo)的距離越遠(yuǎn)、深度越大, 其可能位置區(qū)域就越大。當(dāng)目標(biāo)可能位置區(qū)域大到一定程度時(shí), 單枚彈以當(dāng)前點(diǎn)為瞄準(zhǔn)點(diǎn)的射擊方法就無(wú)法達(dá)到較高的作戰(zhàn)效能, 傳統(tǒng)火箭深彈以固定發(fā)射時(shí)間間隔(0.2 s), 對(duì)同一瞄準(zhǔn)點(diǎn)齊射的方法也不適用。因此, 應(yīng)采取圍繞目標(biāo)當(dāng)前點(diǎn)向不同瞄準(zhǔn)點(diǎn)實(shí)施分時(shí)點(diǎn)射的齊射方法[4], 以盡量覆蓋較大的目標(biāo)可能位置區(qū)域。
3.4 當(dāng)前點(diǎn)齊射瞄準(zhǔn)點(diǎn)的選擇
火箭自導(dǎo)深彈齊射是指, 水面艦艇發(fā)射2枚或2枚以上火箭自導(dǎo)深彈對(duì)同一目標(biāo)進(jìn)行射擊, 使火箭自導(dǎo)深彈同時(shí)或在較短時(shí)間間隔內(nèi)抵達(dá)預(yù)定落水點(diǎn)(瞄準(zhǔn)點(diǎn))的射擊方式[5]。齊射時(shí), 應(yīng)根據(jù)齊射數(shù)量、舷側(cè)陣自導(dǎo)系統(tǒng)作用范圍, 以當(dāng)前點(diǎn)水平位置為中心, 合理組織各枚彈的瞄準(zhǔn)點(diǎn)(落點(diǎn))位置。
選擇火箭自導(dǎo)深彈齊射瞄準(zhǔn)點(diǎn)應(yīng)遵循以下原則: 首先, 應(yīng)盡量覆蓋較大的目標(biāo)可能位置區(qū)域; 其次, 各枚彈搜索范圍之間應(yīng)有一定的重合部分。
1) 坐標(biāo)系的選擇
2) 2枚當(dāng)前點(diǎn)齊射瞄準(zhǔn)點(diǎn)選擇

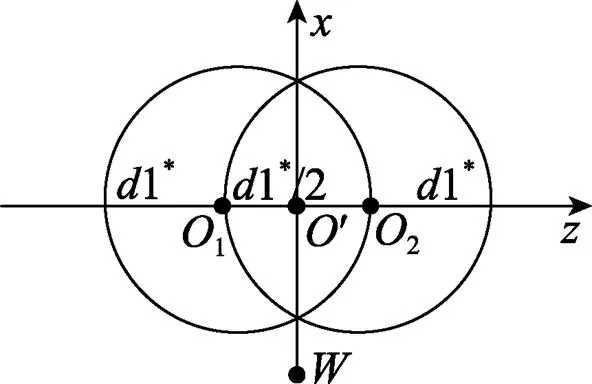
圖6 2枚齊射瞄準(zhǔn)點(diǎn)選擇示意圖
3) 3枚當(dāng)前點(diǎn)齊射瞄準(zhǔn)點(diǎn)選擇
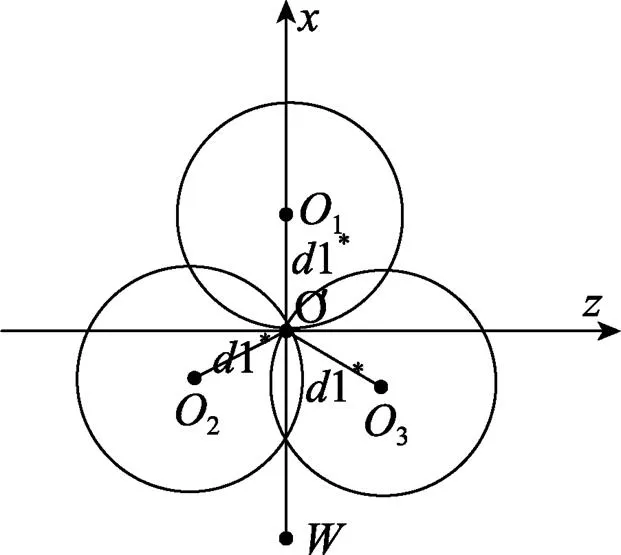
圖7 3枚齊射瞄準(zhǔn)點(diǎn)選擇示意圖

3.5 齊射各枚彈的發(fā)射時(shí)間確定
齊射時(shí), 各枚彈射程不同, 飛行時(shí)間也將不同。若要滿足齊射定義中“同時(shí)或在較短時(shí)間間隔內(nèi)抵達(dá)預(yù)定落水點(diǎn)”的要求, 必須對(duì)各枚彈的發(fā)射時(shí)間做出規(guī)定。


4 仿真想定及結(jié)果分析
根據(jù)所建立的模型及給出的齊射方法, 在典型條件下, 對(duì)當(dāng)前點(diǎn)齊射命中概率進(jìn)行蒙特卡洛模擬仿真, 并分析仿真結(jié)果。火箭自導(dǎo)深彈主要參數(shù)設(shè)定見(jiàn)表2。

表2 火箭自導(dǎo)深彈主要戰(zhàn)術(shù)技術(shù)參數(shù)
4.1 誤差取值
基于蒙特卡洛法進(jìn)行仿真, 各種隨機(jī)變量的誤差取值合適與否是仿真結(jié)論可信性的關(guān)鍵。根據(jù)一般經(jīng)驗(yàn)確定計(jì)算中涉及的主要誤差取值見(jiàn)表3[7]。
表3 主要誤差取值
表中:為目標(biāo)與我艦的實(shí)際距離;為火箭自導(dǎo)深彈空中飛行距離。
4.2 目標(biāo)初始態(tài)勢(shì)想定及仿真結(jié)果分析
目標(biāo)潛艇航速范圍0~20 kn, 航向范圍0~360°, 深度范圍0~50 m。發(fā)射時(shí)刻, 目標(biāo)潛艇的航速、航向以及深度按均勻分布隨機(jī)產(chǎn)生。為保證結(jié)果具有較高的置信度, 仿真次數(shù)取2 000, 結(jié)果如下。
1) 目標(biāo)勻速直航時(shí)的齊射命中概率
為了體現(xiàn)直觀性, 圖8給出了對(duì)距離6 km的勻速直航目標(biāo)齊射時(shí), 命中范圍俯視圖。從圖中可以看出, 2枚齊射時(shí)存在明顯的攻擊盲區(qū)。
圖8 齊射命中目標(biāo)范圍仿真示意圖
圖9給出了目標(biāo)實(shí)際運(yùn)動(dòng)為勻速直航時(shí)的命中概率。如圖所示, 目標(biāo)距離小于3 km時(shí), 2枚齊射和3枚齊射的發(fā)現(xiàn)概率均在90%以上。隨著目標(biāo)距離的增加, 2枚齊射命中概率迅速減小, 當(dāng)距離為7 km時(shí), 2枚齊射的命中概率下降到60%, 而3枚齊射在射程允許范圍內(nèi)的命中概率均在90%以上。
2) 目標(biāo)S狀運(yùn)動(dòng)時(shí)的齊射命中概率
圖10給出了目標(biāo)潛艇為避免我艦解算運(yùn)動(dòng)要素而作S狀機(jī)動(dòng)時(shí)的命中概率。從圖中可知, 該情況下3枚齊射命中概率同樣在90%以上, 2枚齊射命中概率較高于直航情況。原因是火箭自導(dǎo)深彈飛行和沉降過(guò)程中, 目標(biāo)潛艇駛離當(dāng)前點(diǎn)所產(chǎn)生的目標(biāo)可能區(qū)域要小于直航情況。

圖9 對(duì)勻速直航目標(biāo)齊射命中概率
圖10 對(duì)S狀運(yùn)動(dòng)目標(biāo)齊射命中概率
3) 目標(biāo)旋回機(jī)動(dòng)時(shí)的齊射命中概率


圖11給出了目標(biāo)在火箭自導(dǎo)深彈發(fā)射時(shí)刻為勻速直線運(yùn)動(dòng), 而后進(jìn)行旋回機(jī)動(dòng)時(shí)的齊射命中概率。

圖11 對(duì)旋回機(jī)動(dòng)目標(biāo)齊射命中概率
從圖中可以看出, 對(duì)于隨機(jī)機(jī)動(dòng)的潛艇目標(biāo), 齊射命中概率也大于直航運(yùn)動(dòng)潛艇。
5 結(jié)束語(yǔ)
文中建立了“海矛”類火箭自導(dǎo)深彈彈道模型和自導(dǎo)檢測(cè)模型, 并給出了齊射方法, 以此為基礎(chǔ)對(duì)不同條件下的當(dāng)前點(diǎn)齊射命中概率進(jìn)行了仿真。經(jīng)研究認(rèn)為, 在火箭自導(dǎo)深彈射程范圍內(nèi), 對(duì)在深度為50 m淺海水域活動(dòng)的潛艇, 一次對(duì)目標(biāo)當(dāng)前點(diǎn)齊射3枚以上可達(dá)到90%以上的命中概率。所得到的結(jié)論可為進(jìn)一步研究此類武器的作戰(zhàn)使用提供一定的參考。
[1] 傅金祝. 廉價(jià)的反潛武器——海矛[J]. 水雷戰(zhàn)與艦船防護(hù), 2006(1): 1-5.
[2] 周明, 徐德民. 火箭助飛魚雷對(duì)隨機(jī)機(jī)動(dòng)目標(biāo)的射擊效率仿真[J]. 火力與指揮控制, 2007, 32(4): 116-118.Zhou Ming, Xu De-min. Study on Fire Efficiency for Attacking Random Maneuvering Target by the Rocket-assisted Torpedo[J]. Fire Control and Command Control, 2007, 32(4): 116-118.
[3] 韓子鵬. 彈箭外彈道學(xué)[M]. 北京: 北京理工大學(xué)出版社, 2005.
[4] 門金柱, 周明, 鄭亞波. 雙艦齊射火箭助飛魚雷協(xié)同攻潛研究[J]. 魚雷技術(shù), 2010, 18(4): 317-320.Men Jin-zhu, Zhou Ming, Zheng Ya-bo. Simulation of Rocket Assisted Torpedo Salvo Attack from a Two-Warship Formation[J]. Torpedo Technology, 2010, 18(4): 317-320.
[5] 門金柱, 周明, 初磊. 編隊(duì)使用火箭助飛魚雷齊射問(wèn)題探討[J]. 魚雷技術(shù), 2008, 16(5): 60-62. Men Jin-zhu, Zhou Ming, Chu Lei. Study on Rocket Assisted Torpedo Salvo for Surface Formation[J]. Torpedo Technology, 2008, 16(5): 60-62.
[6] 李文哲, 張宇文, 時(shí)進(jìn)發(fā), 等. 火箭深彈人工散布射擊方法[J]. 火力與指揮控制, 2009, 34(4): 85-87.
Li Wen-zhe, Zhang Yu-wen, Shi Jin-fa, et al. Research on Firing Methods of Rocket Depth-charge Artificial Scatter [J]. Fire Control and Command Control, 2009, 34(4): 85-87.
[7] 刑昌風(fēng), 李敏勇, 吳玲. 艦載武器系統(tǒng)效能[M]. 北京: 國(guó)防工業(yè)出版社, 2007.
[8] 孟慶玉, 張靜遠(yuǎn). 魚雷作戰(zhàn)效能分析[M]. 北京: 國(guó)防工業(yè)出版社, 2003.
(責(zé)任編輯: 許 妍)
Study on Salvo Method of Rocket Homing Depth Charges
ZHAO Dan-huiHE Xin-yiCHEN Zhao-fengZHU Bin
(Naval Academy of Armament, Beijing 100161, China)
Taking Germany Seapike as an example, we establish a virtual trajectory model and a detecting model of a rocket homing depth charge based on the data from public reports and routine hypothesis, offer its salvo method, and compare the simulated hit probabilities of depth charge salvos with different number of depth charges. The results show that in typical conditions, 3 charges salvo could achieve the best cost-efficiency ratio, and higher hit probability of depth charge salvo can be obtained in the case of shorter target distance and larger maneuver.
rocket homing depth charge; multiple salvo; salvo method; best cost-efficiency
TJ65
A
1673-1948(2014)03-0214-07
2013-11-14;
2014-02-16.
國(guó)家自然科學(xué)基金(60902071).
趙丹輝(1984-), 男, 碩士, 研究方向?yàn)槲淦飨到y(tǒng)與運(yùn)用工程.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
