基于擴(kuò)張狀態(tài)觀測(cè)器的反魚雷魚雷迎面攔截制導(dǎo)律
2014-02-27 06:30:06楊惠珍
水下無人系統(tǒng)學(xué)報(bào) 2014年3期
關(guān)鍵詞:系統(tǒng)
楊惠珍
?
基于擴(kuò)張狀態(tài)觀測(cè)器的反魚雷魚雷迎面攔截制導(dǎo)律
楊惠珍
(西北工業(yè)大學(xué) 航海學(xué)院, 陜西 西安, 710072)
基于雷目相對(duì)運(yùn)動(dòng)方程, 把迎面攔截問題描述成具有終端角約束的最優(yōu)控制問題, 針對(duì)魚雷自導(dǎo)頭難以測(cè)量視線角速率的難題, 提出了一種基于擴(kuò)張狀態(tài)觀測(cè)器的目標(biāo)視線角速率實(shí)時(shí)在線估計(jì)方法, 同時(shí)估計(jì)出目標(biāo)機(jī)動(dòng)引起的不確定干擾量, 并基于線性化的側(cè)向運(yùn)動(dòng)方程求解出反魚雷魚雷舵角控制指令, 從而實(shí)現(xiàn)了含有干擾補(bǔ)償?shù)挠鏀r截最優(yōu)制導(dǎo)律。仿真結(jié)果表明, 與傳統(tǒng)的比例導(dǎo)引律相比, 該最優(yōu)制導(dǎo)律具有很好的迎面攔截效果。
反魚雷魚雷; 擴(kuò)張狀態(tài)觀測(cè)器; 迎面攔截制導(dǎo)律; 終端角約束; 最優(yōu)控制
0 引言
反魚雷魚雷(anti-torpedo torpedo, ATT)是反導(dǎo)系統(tǒng)概念在水下戰(zhàn)場(chǎng)的拓展應(yīng)用。然而, 水下環(huán)境遠(yuǎn)比空間要復(fù)雜的多, 反魚雷魚雷的研制在自導(dǎo)、控制、動(dòng)力和引信等方面面臨諸多難題。制導(dǎo)導(dǎo)引律的設(shè)計(jì)是實(shí)現(xiàn)成功攔截的關(guān)鍵要素之一。
由于導(dǎo)彈自導(dǎo)系統(tǒng)可以直接測(cè)量彈目視線角的變化率, 因此, 比例導(dǎo)引及其拓展方法是導(dǎo)彈攔截制導(dǎo)律的常用方法, 相關(guān)研究成果非常多。然而, 魚雷自導(dǎo)頭安裝在魚雷頭部, 其探測(cè)范圍受到一定的限制, 且聲學(xué)探測(cè)精度不高, 目前可測(cè)量的物理量?jī)H有距離或方位, 使得比例導(dǎo)引等先進(jìn)的制導(dǎo)律在ATT上難以實(shí)現(xiàn)工程應(yīng)用。
本文提出了一種基于擴(kuò)張狀態(tài)觀測(cè)器的ATT迎面攔截制導(dǎo)律。基于相對(duì)運(yùn)動(dòng)方程, 建立了ATT迎面攔截問題的終端角約束最優(yōu)控制模型, 設(shè)計(jì)了擴(kuò)張狀態(tài)觀測(cè)器對(duì)制導(dǎo)律所需的視線角變化率, 并對(duì)目標(biāo)機(jī)動(dòng)引起的干擾量進(jìn)行估計(jì), 根據(jù)最優(yōu)控制律獲得法向加速度信息, 然后利用ATT線性化水平面動(dòng)力學(xué)方程求解出控制舵角, 從而實(shí)現(xiàn)了一種含干擾補(bǔ)償?shù)腁TT迎面攔截最優(yōu)制導(dǎo)律。
1 ATT攔截過程數(shù)學(xué)模型

圖1 水平面內(nèi)的雷目相對(duì)運(yùn)動(dòng)示意圖
反魚雷魚雷的運(yùn)動(dòng)學(xué)模型為
魚雷控制加速度是由控制回路實(shí)現(xiàn)的, 即由舵機(jī)的變化實(shí)現(xiàn)。參照文獻(xiàn)[5], 在一定假設(shè)條件下魚雷的側(cè)向運(yùn)動(dòng)具有如下的線性形式


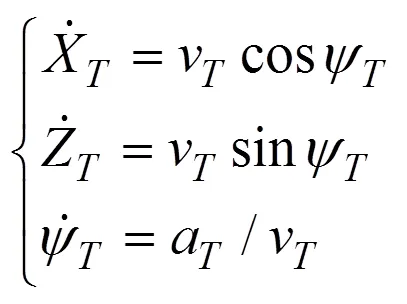
目標(biāo)來襲魚雷的運(yùn)動(dòng)學(xué)模型為

雷目相對(duì)運(yùn)動(dòng)模型為
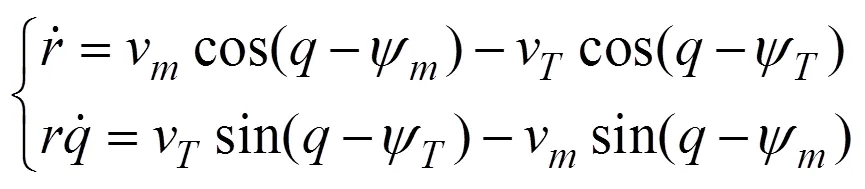

其中
2 基于擴(kuò)張狀態(tài)觀測(cè)器的ATT迎面攔截制導(dǎo)律
2.1 具有終端角約束的最優(yōu)導(dǎo)引律

為了使速度損失最小且滿足終端角約束, 取系統(tǒng)的性能指標(biāo)為

根據(jù)極小值原理, 系統(tǒng)最優(yōu)解為



2.2 估計(jì)和干擾量
擴(kuò)張狀態(tài)觀測(cè)器(extended state observer, ESO)是一種不依賴系統(tǒng)傳遞關(guān)系描述, 僅通過系統(tǒng)輸入輸出實(shí)現(xiàn)系統(tǒng)狀態(tài)和干擾量估計(jì)的數(shù)字算法[8]。
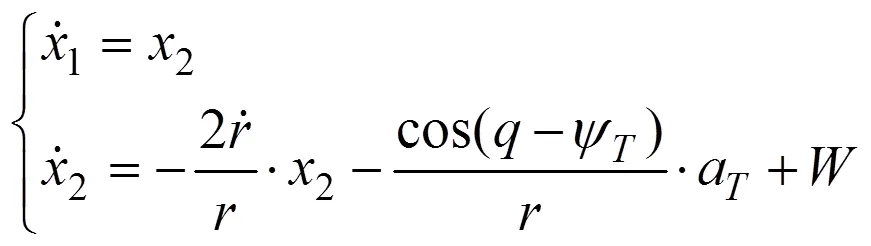
對(duì)系統(tǒng)(6)引入第3個(gè)擴(kuò)張狀態(tài)




2.3 基于ESO的攔截導(dǎo)引律
根據(jù)上述分析, 本文研究的基于ESO的反魚雷魚雷迎面攔截導(dǎo)引系統(tǒng)的原理可由圖2表示。

圖2 基于擴(kuò)張狀態(tài)觀測(cè)器的反魚雷魚雷迎面攔截導(dǎo)引系統(tǒng)原理圖

3 仿真結(jié)果與分析


圖3 來襲魚雷勻速直線運(yùn)動(dòng)時(shí)ATT的攔截彈道
圖4 來襲魚雷勻速直線運(yùn)動(dòng)時(shí)ATT的彈道傾角

表1 來襲魚雷勻速直線運(yùn)動(dòng)時(shí)的命中參數(shù)
圖5 來襲魚雷蛇形機(jī)動(dòng)時(shí)ATT的攔截彈道

圖6 來襲魚雷蛇形機(jī)動(dòng)時(shí)ATT的彈道傾角

表2 來襲魚雷機(jī)動(dòng)時(shí)的命中參數(shù)

4 結(jié)束語
本文提出了一種基于擴(kuò)張狀態(tài)觀測(cè)器的ATT迎面攔截制導(dǎo)律。該制導(dǎo)律利用擴(kuò)張狀態(tài)觀測(cè)器對(duì)ATT無法測(cè)量的視線角變化率和目標(biāo)機(jī)動(dòng)相關(guān)干擾量進(jìn)行實(shí)時(shí)估計(jì), 從而實(shí)現(xiàn)了類似比例導(dǎo)引的迎面攔截最優(yōu)制導(dǎo)律, 且該制導(dǎo)律含有干擾補(bǔ)償項(xiàng), 因此攔截效果明顯好于比例導(dǎo)引。
[1] 詹致祥. 魚雷制導(dǎo)規(guī)律及命中精度[M]. 西安: 西北工業(yè)大學(xué)出版社, 1995.
[2] 嚴(yán)衛(wèi)生, 任章, 徐德民, 等. 迎面攔截導(dǎo)引律及其應(yīng)用研究[J]. 西北工業(yè)大學(xué)學(xué)報(bào), 2000,18(4): 616-620.
Yan Wei-sheng, Ren Zhang, Xu De-min, et al. A Head-on Impact Variable Structure Guidance Law[J]. Journal of Northwestern Polytechnical Univesity, 2000, 18(4): 616- 620.
[3] 劉宇, 原建平, 侯朝煥. 水下自導(dǎo)武器導(dǎo)引律研究[J]. 兵工學(xué)報(bào), 2008, 29(4):483-486.
Liu Yu, Yuan Jian-ping, Hou Chao-huan. Research on the Guidance Law of Underwater Autoguide Weapon[J]. Acta Armamentari, 2008, 29(4): 483-486.
[4] 王新宏, 劉慶, 劉建國. 基于相遇區(qū)域的反魚雷魚雷攔截彈道[J]. 魚雷技術(shù), 2013, 21(4): 241-245.
Wang Xin-hong, Liu Qing, Liu Jian-guo. Intercept Trajectory of Anti-Torpedo Torpedo Based on Meeting Area[J]. Torpedo Technology, 2013, 21(4): 241-245.
[5] 徐德民. 魚雷自動(dòng)控制系統(tǒng)[M]. 西安: 西北工業(yè)大學(xué), 2001.
[6] 李憲強(qiáng), 周軍, 葛致磊. 可攔截機(jī)動(dòng)目標(biāo)的終端角度約束制導(dǎo)律研究[C]//2013全國兵器科學(xué)與技術(shù)學(xué)科博士生學(xué)術(shù)論壇, 2013: 680-684.
[7] 趙漢元.飛行器再入動(dòng)力學(xué)與制導(dǎo)[M]. 長(zhǎng)沙: 國防科技大學(xué)出版社, 1997.
[8] 韓京清. 自抗擾控制技術(shù)[M]. 北京:國防工業(yè)出版社, 2008.
[9] 王志強(qiáng), 吳嘉澍, 郭寒軍. 專家自控?cái)_控制器設(shè)計(jì)[C]//中國控制與決策會(huì)議, 2008: 1761-1763.
[10] Zeng Wen-fei, Yan Ling. The Parameter Setting and Application Study of ADRC Based on Immune Genetic Algorithm[C]//2010 IEEE International Conference on Intelligent Computing and Intelligent Systems(ICIS): 2010: 183-186.
(責(zé)任編輯: 楊力軍)
Extended State Observer-Based Head-on Intercept Guidance Law for Anti-Torpedo Torpedo
YANG Hui-zhen
(College of Marine Engineering, Northwestern Polytechnical University, Xi′an 710072, China)
According to the equations of relative movement between anti-torpedo torpedo(ATT) and incoming torpedo, the head-on interception problem is described as an optimal control problem with finial angle constraint. Because the angular rate of line-of-sight is difficult to be obtained by homing system of ATT, an extended state observer is designed for estimating the angular rate and the value of uncertain disturbance caused by incoming torpedo maneuvering, and the control rudder angle can be calculated by solving the linear horizontal dynamical equations of ATT. Hence, the optimal guidance law with disturbance compensation is implemented. Simulation results show that the proposed optimal guidance law gains better head-on interception performance than the traditional proportion guidance law.
anti-torpedo torpedo; extended state observer; head-on intercept guidance law; finial angle constraint; optimal control
TJ630.33; TJ765
A
1673-1948(2014)03-0179-05
2013-12-02;
2014-02-16.
國防科技重點(diǎn)實(shí)驗(yàn)室基金資助(9140C230404130C23084).
楊惠珍(1974-), 女, 博士, 副教授, 主要研究方向?yàn)樗潞叫衅骺刂婆c仿真.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
