全路面起重機(jī)多橋轉(zhuǎn)向軌跡控制仿真實(shí)驗(yàn)
2014-02-08 09:08:08潘志毅劉啟鋒李選朋王惠民
實(shí)驗(yàn)室研究與探索 2014年9期
潘志毅, 劉啟鋒, 李選朋, 王惠民, 吳 濤
(1. 大連理工大學(xué) 機(jī)械工程學(xué)院, 遼寧 大連 116024; 2. 大連理工大學(xué)(徐州)工程機(jī)械中心, 江蘇 徐州 221131; 3. 大連益利亞工程機(jī)械有限公司, 遼寧 大連 116024)
0 引 言
全路面起重機(jī)是一種兼有汽車起重機(jī)和輪胎起重機(jī)性能特點(diǎn)的輪式起重機(jī)。它具有優(yōu)越的起重性能,較強(qiáng)的越野能力,適應(yīng)不同工作環(huán)境,結(jié)構(gòu)緊湊,行駛靈活,爬坡能力好[1]。多橋轉(zhuǎn)向技術(shù)是全路面起重機(jī)的關(guān)鍵技術(shù)之一,其優(yōu)劣直接影響到車輛的通過性和機(jī)動(dòng)性。轉(zhuǎn)向系統(tǒng)的缺陷還會(huì)加劇輪胎的磨損,使車輛可操縱性差,造成經(jīng)濟(jì)浪費(fèi),甚至嚴(yán)重事故。多橋轉(zhuǎn)向模式包括機(jī)械式、液壓式、電控電動(dòng)式、電控液動(dòng)式。電控液壓式轉(zhuǎn)向系統(tǒng)結(jié)構(gòu)簡(jiǎn)單,工作平穩(wěn)可靠,具有較大的轉(zhuǎn)向驅(qū)動(dòng)力,在大型運(yùn)輸車輛應(yīng)用廣泛[2]。
為保證多橋車輛轉(zhuǎn)向行駛時(shí)的穩(wěn)定、準(zhǔn)確及可操縱性,一些學(xué)者提出了多種先進(jìn)的控制策略。Aga等[3]設(shè)計(jì)了一種具有一階滯后的多橋轉(zhuǎn)向系統(tǒng);Yasuji[4]將最優(yōu)控制應(yīng)用于多橋轉(zhuǎn)向系統(tǒng);Yuhara,F(xiàn)urukawa Y提出了一種自適應(yīng)轉(zhuǎn)向控制的方法;國(guó)內(nèi)屈求真[5]基于二自由度對(duì)轉(zhuǎn)向特性進(jìn)行了初步研究;李炎亮[6]提出了橫擺率跟蹤的多輪轉(zhuǎn)向最優(yōu)控制策略;張小江[7]使用無靜差跟蹤控制系統(tǒng),跟蹤理想的橫擺角速度及質(zhì)心側(cè)偏角;孫玉波[8]使用模糊PID策略改善轉(zhuǎn)向液壓系統(tǒng)動(dòng)態(tài)特性。以上研究集中于如何控制轉(zhuǎn)向系統(tǒng),使車身側(cè)偏角為零及橫擺率穩(wěn)定,未涉及到多輪轉(zhuǎn)向軌跡的仿真與優(yōu)化。
本文給出了全路面多橋運(yùn)動(dòng)模型,建立了液壓轉(zhuǎn)向系統(tǒng)的數(shù)學(xué)模型,利用滑模控制方法對(duì)轉(zhuǎn)向路徑進(jìn)行仿真和優(yōu)化,得到實(shí)際路徑與理想軌跡及二者間的誤差曲線。
1 多橋轉(zhuǎn)向模型
車輛轉(zhuǎn)向時(shí)要避免產(chǎn)生路面對(duì)車輛行駛的附加阻力及輪胎側(cè)移引起的磨損,要求轉(zhuǎn)向過程中所有輪胎純滾動(dòng)而無滑動(dòng)。為滿足該要求,阿克曼定理[9]指出,在忽略輪胎側(cè)偏角的影響下,所有車輪軸延長(zhǎng)線應(yīng)該交于一點(diǎn)。阿克曼定理如圖1所示。
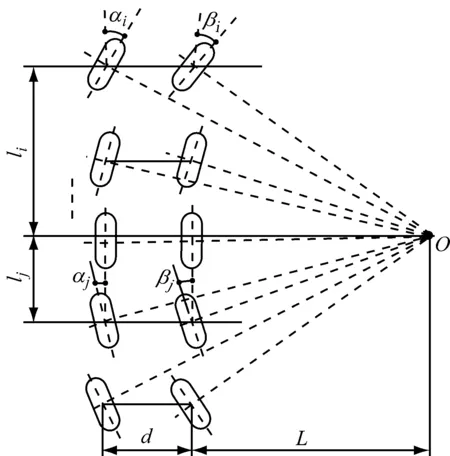
同一轉(zhuǎn)向橋內(nèi)、外輪轉(zhuǎn)角關(guān)系:
cotαi-cotβi=K/L
(1)
不同轉(zhuǎn)向橋的同側(cè)轉(zhuǎn)向輪的轉(zhuǎn)角關(guān)系:
(2)
式中:αi,αj為第i、j車橋外輪轉(zhuǎn)角;βi,βj為第i、j車橋內(nèi)輪轉(zhuǎn)角;K為同一轉(zhuǎn)向軸線主銷的間距;L為起重機(jī)轉(zhuǎn)彎半徑;li,lj為車輛轉(zhuǎn)向中心到第i軸的距離。
建立了起重機(jī)多橋轉(zhuǎn)向模型的笛卡爾坐標(biāo)系如圖2所示。將起重機(jī)簡(jiǎn)化為線性2自由度模型,即只包含車身側(cè)向運(yùn)動(dòng)和車輛橫擺運(yùn)動(dòng)兩個(gè)自由度[10]。起重機(jī)質(zhì)心取其坐標(biāo)中點(diǎn)。
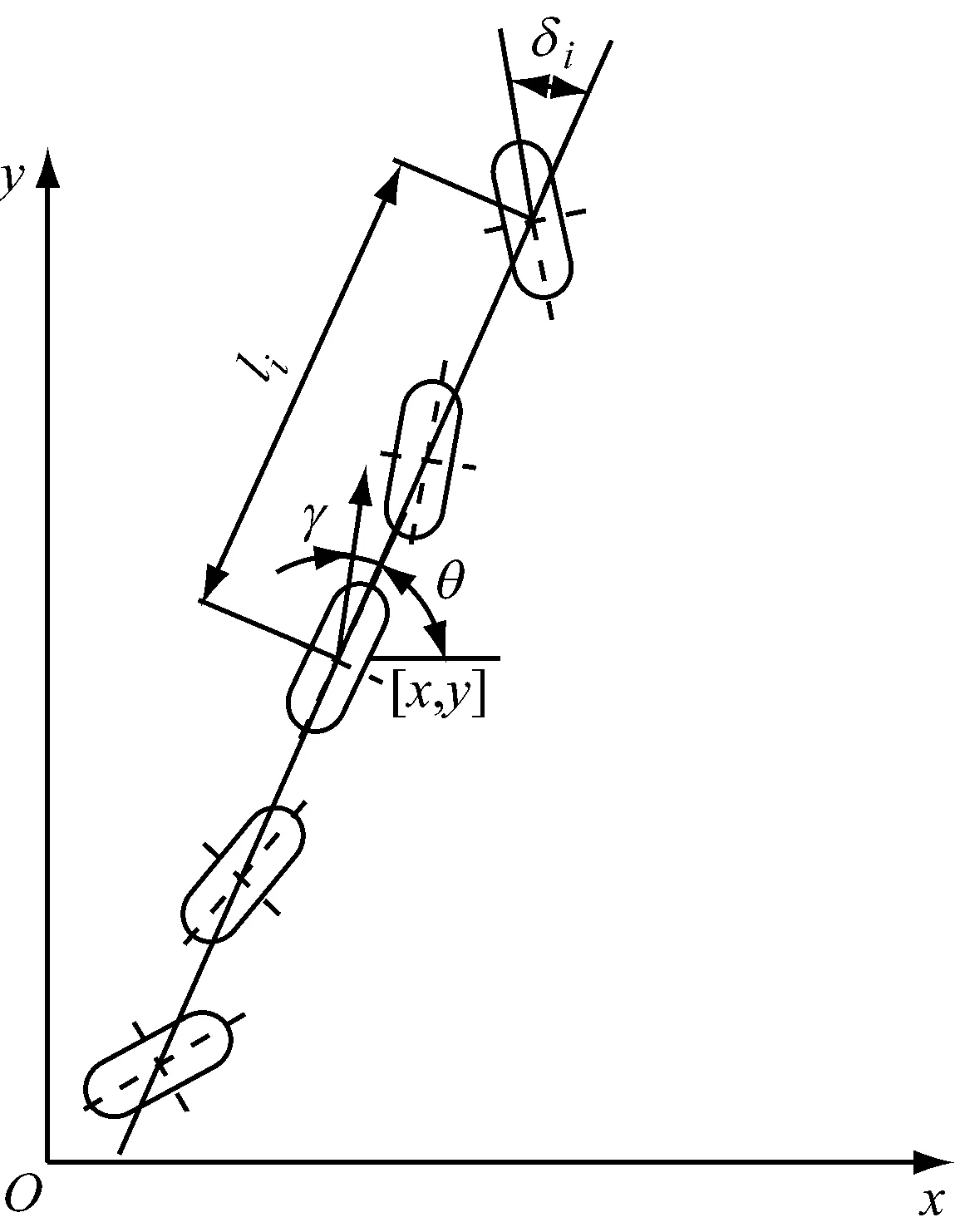
根據(jù)運(yùn)動(dòng)學(xué)方程及幾何知識(shí)可得:
式中:x為起重機(jī)質(zhì)心橫坐標(biāo);y為起重機(jī)質(zhì)心縱坐標(biāo);θ為起重機(jī)航向角,即車身與x軸夾角;γ為車身側(cè)偏角,即速度方向與車身夾角;δi為第i橋車輪轉(zhuǎn)角;v是起重機(jī)質(zhì)心線速度。方程中存在3個(gè)輸入變量:車橋轉(zhuǎn)角δi和δj,速度v,三者都可直接測(cè)得[11]。輸出變量為x′,y′,θ′,積分可得起重機(jī)位姿坐標(biāo)x,y,θ。根據(jù)零質(zhì)心偏角控制策略[12],為使β為零,保證l1tanδ5+l5tanδ1=0即可。
由于液壓轉(zhuǎn)向系統(tǒng)的滯后性及實(shí)際轉(zhuǎn)向中不可預(yù)測(cè)性,起重機(jī)轉(zhuǎn)向行駛時(shí)實(shí)際路徑與理想軌跡存在著誤差。即起重機(jī)理想位姿坐標(biāo)x,y,θ和實(shí)際位姿坐標(biāo)xa,ya,θa不相同。位姿誤差如圖3所示。
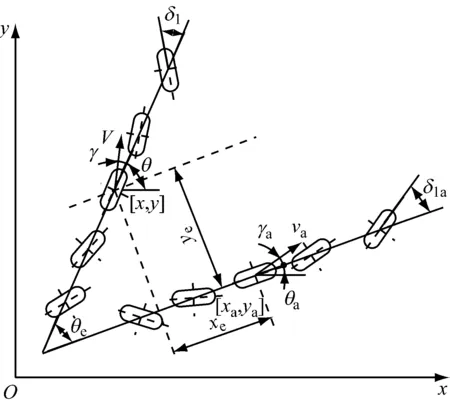
起重機(jī)位姿的誤差方程為:
(5)
其中:xe為車身方向的誤差;ye為車身側(cè)方向誤差;θe為車身航向的角度誤差。
對(duì)式(5)求導(dǎo),整理可得起重機(jī)位姿誤差微分方程:
(6)
2 液壓轉(zhuǎn)向系統(tǒng)數(shù)學(xué)模型
為得到車橋的實(shí)時(shí)轉(zhuǎn)角δi,即起重機(jī)模型轉(zhuǎn)角輸入,需要建立液壓系統(tǒng)數(shù)學(xué)模型。全路面起重機(jī)車橋的轉(zhuǎn)動(dòng)多采用電控液壓式。比例換向閥控制液壓缸的伸縮,拉動(dòng)車橋偏轉(zhuǎn)。液壓執(zhí)行系統(tǒng)為閥控非對(duì)稱缸液壓系統(tǒng)。液壓缸輸出位移函數(shù)[13]為:
(7)
式中:ωh為液壓固有頻率,
ξh為液壓阻尼比,
伸縮缸比例電磁閥的頻寬近似于液壓固有頻率,比例電磁閥可以簡(jiǎn)化為二階震蕩環(huán)節(jié)[13]:
(8)
式中:Ksv為比例閥的增益;ξsv為比例閥的阻尼比。
3 滑模控制與仿真分析
(9)
本文對(duì)160t全路面起重機(jī)轉(zhuǎn)向系統(tǒng)進(jìn)行仿真實(shí)驗(yàn)。該起重機(jī)前2橋?yàn)闄C(jī)械桿系轉(zhuǎn)向,后3橋?yàn)殡娍匾簤恨D(zhuǎn)向。在Matlab軟件Simulink模塊中建立全路面起重機(jī)轉(zhuǎn)向路徑跟蹤模型。其中階躍信號(hào)代表第1車橋轉(zhuǎn)角,輸入液壓系統(tǒng)得到后3橋?qū)崟r(shí)轉(zhuǎn)角。轉(zhuǎn)角與車速傳遞至轉(zhuǎn)向運(yùn)動(dòng)方程,得到起重機(jī)轉(zhuǎn)向?qū)嶋H路徑和理論軌跡的誤差。圖4為起重機(jī)轉(zhuǎn)向路徑跟蹤模型,圖5為轉(zhuǎn)向液壓系統(tǒng)模型。
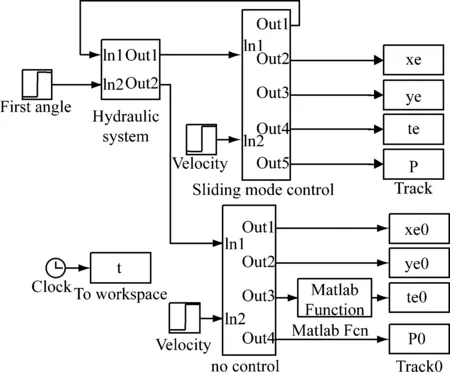
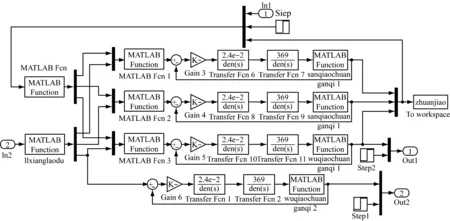
圖5 轉(zhuǎn)向液壓系統(tǒng)模型
設(shè)定第一橋轉(zhuǎn)向角為40.1° (第一橋最大轉(zhuǎn)角),車速為3.6 km/h,仿真時(shí)間為30 s。不施加控制算法,起重機(jī)轉(zhuǎn)向路徑跟蹤模型仿真輸出如圖6、7。采用滑模控制方法,仿真輸出如圖8、9。
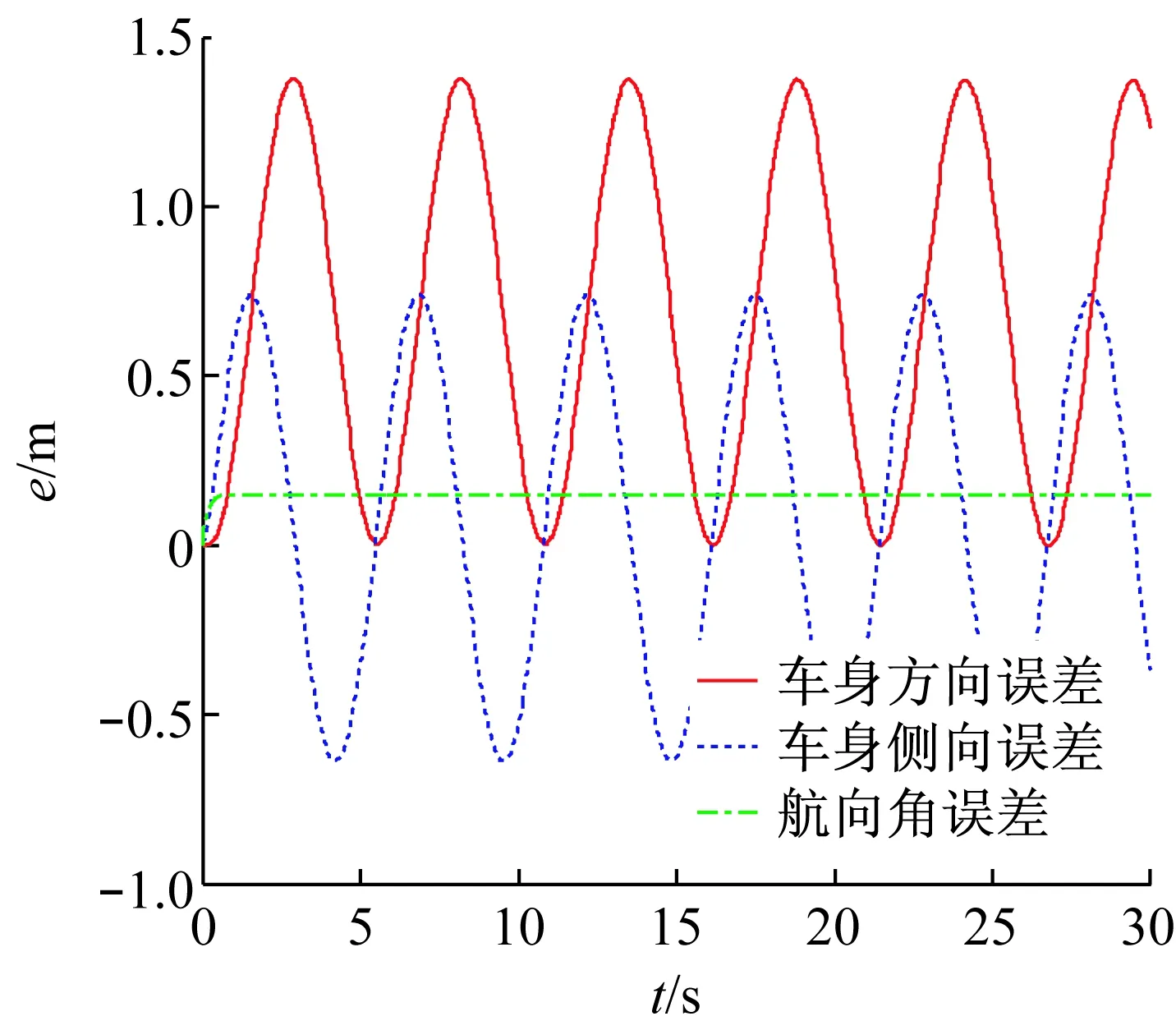
圖6 起重機(jī)轉(zhuǎn)向路徑與理論軌跡誤差(未采用滑模控制)
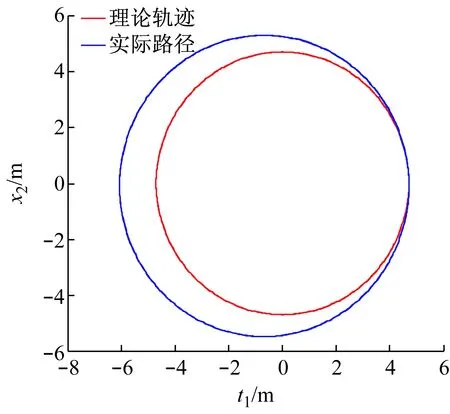
圖7 起重機(jī)轉(zhuǎn)向路徑 (未采用滑模控制)
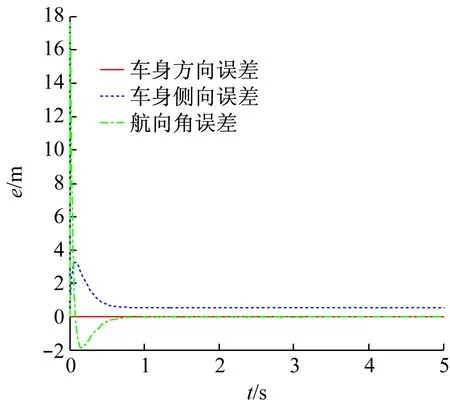
圖8 起重機(jī)轉(zhuǎn)向路徑與理論軌跡誤差(采用滑模控制)
將車速v分別設(shè)定為3.6 km/h, 10 km/h, 20 km/h,第一橋轉(zhuǎn)角分別設(shè)定為40.1°, 20°, 5°,進(jìn)行仿真實(shí)驗(yàn)。起重機(jī)轉(zhuǎn)向路徑跟蹤模型仿真輸出結(jié)果匯總見表1。
4 結(jié) 論
(1) 滑模控制方法大大地減小了全路面起重機(jī)多橋轉(zhuǎn)向?qū)嶋H路徑與理論軌跡的誤差,保證了起重機(jī)能夠按照理論軌跡行駛;
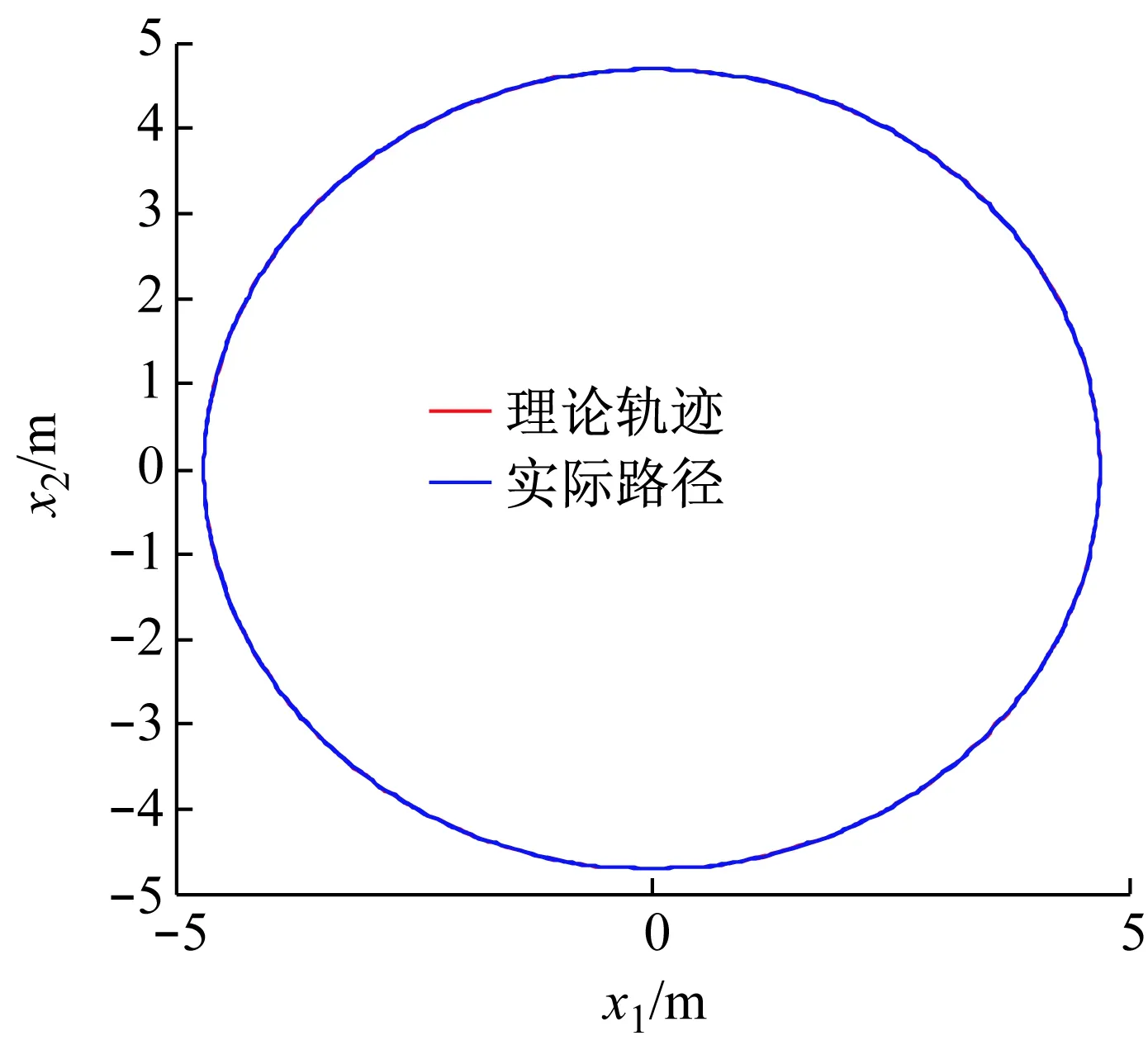
圖9 起重機(jī)轉(zhuǎn)向路徑 (采用滑模控制)
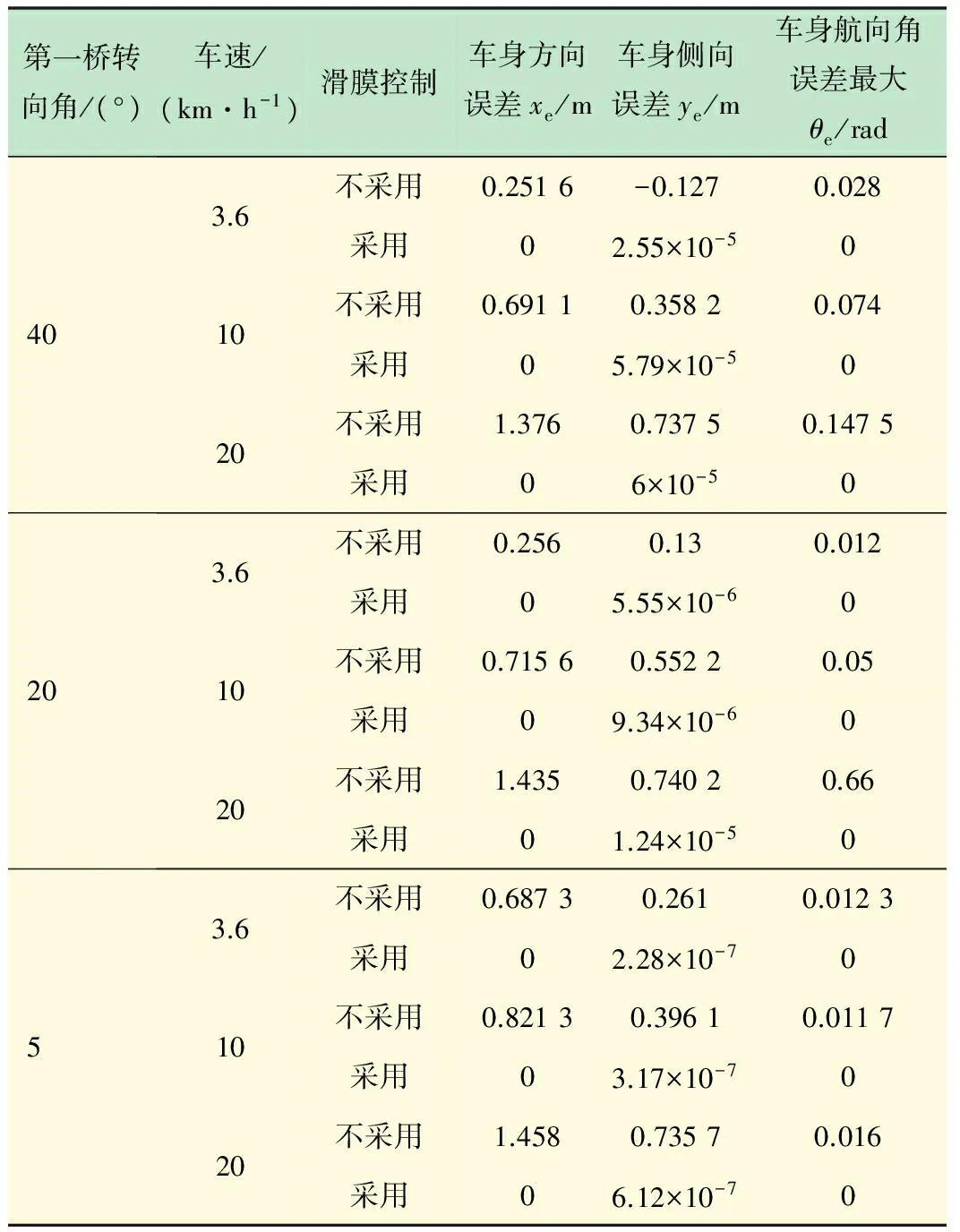
第一橋轉(zhuǎn)向角/(°)車速/(km·h-1)滑膜控制車身方向誤差xe/m車身側(cè)向誤差ye/m車身航向角誤差最大θe/rad403.61020不采用0.2516-0.1270.028采用02.55×10-50不采用0.69110.35820.074采用05.79×10-50不采用1.3760.73750.1475采用06×10-50203.61020不采用0.2560.130.012采用05.55×10-60不采用0.71560.55220.05采用09.34×10-60不采用1.4350.74020.66采用01.24×10-5053.61020不采用0.68730.2610.0123采用02.28×10-70不采用0.82130.39610.0117采用03.17×10-70不采用1.4580.73570.016采用06.12×10-70
(2) 滑模軌跡控制下,行駛速度和一橋轉(zhuǎn)角的增加,都會(huì)導(dǎo)致車身側(cè)向誤差會(huì)增大,而車身方向與航向角誤差基本不變;
(3) 不施加控制算法時(shí),行駛速度,一橋轉(zhuǎn)角的變化,會(huì)對(duì)軌跡跟蹤誤差三個(gè)方面都產(chǎn)生很大的影響。
[1] 史先信.技術(shù)引領(lǐng)發(fā)展創(chuàng)新鑄就輝煌——我國(guó)全地面起重機(jī)行業(yè)技術(shù)創(chuàng)新發(fā)展之路[J].建設(shè)機(jī)械技術(shù)與管理,2010(10):65.
SHI Xian-xin. Technology Innovation of China All Terrain Crane Industry[J]. Construction Machinery Technology & Management,2010(10):65.
[2] 高秀華,張春秋,李炎亮.多輪轉(zhuǎn)向系統(tǒng)轉(zhuǎn)向控制模式綜述[J].起重運(yùn)輸機(jī)械,2006(6):5-9.
GAO Xiu-hua,ZHANG Chun-qiu,LI Yan-liang. Review of Steering Control Modes for Multi-wheel Systems[J]. Hoisting and Conveying Machinery,2006(6):5-9.
[3] Aga M,Kusumoki H,Satoh Y,等.四輪主動(dòng)轉(zhuǎn)向車輛二自由度控制系統(tǒng)[J].國(guó)際汽車工程師學(xué)會(huì),1990,17(9):69-76.
Aga M,Kusumoki H,Satoh Y,etal. Design of 2-degree-of-freedom control system for active front-and-rear-wheel steering[J].Society of Automotive Engineer,1990,17(9):69-76.
[4] Yasuji Shibahata.底盤控制技術(shù)發(fā)展?fàn)顩r與趨勢(shì)[J].控制年評(píng).2005,29(1):151-158.
Yasuji Shibahata.Progress and future direction of Chassis control technology[J].Annual Reviews in Control.2005, 29(1):151-158.
[5] 管西強(qiáng),屈求真.三軸汽車前后輪轉(zhuǎn)向時(shí)的側(cè)向動(dòng)力學(xué)控制[J].機(jī)械科學(xué)與技術(shù),2002,21(1):69-71.
GUAN Xi-qiang,QU Qiu-zhen,Adaptive Model-Following Control of Four-Wheel Steering Vehicle[J].Mechanical Science and Technology for Aerospace engineering,2002,21(1):69-71.
[6] 李炎亮.全地面起重機(jī)多橋動(dòng)態(tài)轉(zhuǎn)向控制系統(tǒng)研究[D].長(zhǎng)春:吉林大學(xué),2006.
[7] 張小江.全地面起重機(jī)轉(zhuǎn)向性能仿真和試驗(yàn)研究[D].長(zhǎng)春:吉林大學(xué),2011.
[8] 孫玉波,高秀華,周富家,等.大型載重車輛電液多軸轉(zhuǎn)向執(zhí)行機(jī)構(gòu)的模糊PID控制[J].農(nóng)業(yè)工程學(xué)報(bào),2007,23(5):100-104.
SUN Yu-bo,GAO Xiu-hua,ZHOU Fu-jia.etal.Fuzzy-PID control of the executive mechanism of electro-hydraulic multi-axle steering system for large heavy truck[J].Transactions of the CSAE,2007,23(5):100-104.
[9] 丁兆義.全路面起重機(jī)底盤關(guān)鍵技術(shù)淺析[J].機(jī)械管理開發(fā),2011(10):8-10.
DING Zhao-yi.Analysis on Key Technique of All-terrain Crane Chassis[J].Mechanical Management and Development,2011(10):8-10.
[10] Razvan Solea,Adrian Filipescu,Viorel Minzu 等.四輪轉(zhuǎn)向車輛的滑模軌跡跟蹤控制[C]∥第八次IEEE國(guó)際自動(dòng)化控制會(huì)議,中國(guó) 廈門,2010:382-387.
Razvan Solea,Adrian Filipescu,Viorel Minzuetal. Sliding-mode Trajectory-tracking Control for a Four-Wheel-Steering Vehicle[C]∥8th IEEE International Conference on Control and Automation,Xiamen China,2010:382-387.
[11] 崔宏巍,車輛動(dòng)態(tài)安全監(jiān)控實(shí)驗(yàn)教學(xué)平臺(tái)的開發(fā)[J].實(shí)驗(yàn)室研究與探索,2011(8):442-445.
CUI Hong-wei,Development and Research of Vehicle Dynamic Security Supervision Platform for Experimental Teaching[J].Research and exploration In Laboratory.2011(8):442-445.
[12] 張小江,高秀華,趙建國(guó).多軸轉(zhuǎn)向車輛零側(cè)偏角控制策略研究[J].農(nóng)業(yè)裝備與車輛工程,2008(6):13-15.
ZHANG Xiao-jiang,GAO Xiu-hua,ZHAO Jian-guo. The Zero Sideslip Angle Proportional Control Research on Multi-axle Steering Vehicle[J].Agricultural Equipment Vehicle Engineering.2008(6):13-15.
[13] 王春行.液壓控制系統(tǒng)[M].北京:機(jī)械工業(yè)出版社,2006:100-114.
[14] 劉金琨.滑模變結(jié)構(gòu)控制MATALB仿真[M].北京:北京大學(xué)出版社,2005:262-276.
[15] 高強(qiáng),王晨光.基于模糊增益調(diào)整的雙關(guān)節(jié)機(jī)械手滑模軌跡跟蹤控制[J].實(shí)驗(yàn)室研究與探索,2012(11):78-81.
GAO Qiang,WANG Chen-guang. Trajectory Tracking Control of Sliding Mode Based on Two-joints Robot Manipulator of Fuzzy Gain Adjustment[J]. Research and exploration in Laboratory.2012(11):78-81.
- 實(shí)驗(yàn)室研究與探索的其它文章
- 互動(dòng)式網(wǎng)絡(luò)實(shí)驗(yàn)教學(xué)綜合平臺(tái)建設(shè)
——以電子信息實(shí)驗(yàn)教學(xué)中心為例 - “泡”實(shí)驗(yàn)室 攻世界難題(一)
——中國(guó)青年女科學(xué)家顏寧教授博文及有關(guān)資料選編 - 淺析高校實(shí)驗(yàn)室安全與環(huán)境保護(hù)存在的問題
- 高校文科綜合實(shí)驗(yàn)教學(xué)中心建設(shè)研究述評(píng)
- 醫(yī)學(xué)院校實(shí)驗(yàn)技術(shù)隊(duì)伍建設(shè)存在的問題與對(duì)策
- 基于創(chuàng)新教育的信息安全實(shí)踐課程建設(shè)