基于聚類的干擾資源優(yōu)化分配研究*
2014-01-16 15:56:28
艦船電子工程 2014年4期
(海軍蚌埠士官學(xué)校 蚌埠 233012)
1 引言
雷達(dá)干擾資源分配是指通過(guò)雷達(dá)偵察得到敵方雷達(dá)的參數(shù),根據(jù)我方現(xiàn)有的干擾資源和戰(zhàn)術(shù)要求,針對(duì)敵方雷達(dá)的威脅時(shí)間和威脅程度,合理分配我方的雷達(dá)干擾資源的過(guò)程[1]。雷達(dá)干擾資源的分配是否合理,己經(jīng)成為影響作戰(zhàn)結(jié)果的重要因素之一。在實(shí)戰(zhàn)中,為了使己方的干擾機(jī)能夠?qū)撤降睦走_(dá)進(jìn)行最大程度的壓制,更好地對(duì)我方的人員和裝備實(shí)施保護(hù),要求對(duì)我方的干擾資源進(jìn)行合理高效的分配。目前來(lái)講,干擾資源分配的主要依據(jù)是作戰(zhàn)指揮員的經(jīng)驗(yàn)。但是,如果在復(fù)雜的電磁環(huán)境下依然依靠這種手動(dòng)的經(jīng)驗(yàn)式的分配方式,就有可能造成嚴(yán)重的后果。如何在時(shí)間緊迫、高度復(fù)雜的現(xiàn)代戰(zhàn)場(chǎng),對(duì)我方有限的干擾資源進(jìn)行合理的分配使其發(fā)揮最佳的干擾效果,一直是我們研究的一個(gè)重點(diǎn)課題。
FKM(Fuzzy K-Means)是相對(duì)于硬聚類(一個(gè)樣本必須屬于也只能屬于某一個(gè)類)而言的一種聚類方法。在樣本聚類過(guò)程中產(chǎn)品往往可能屬于多個(gè)類群,F(xiàn)KM方法通過(guò)引入隸屬度概念把聚類分析技術(shù)和模糊集技術(shù)相結(jié)合,能夠更好地反映樣本類型[2]。文中主要是對(duì)基于聚類的干擾資源分配方法進(jìn)行分析和研究,針對(duì)現(xiàn)有資源分配方法的不足之處提出了改進(jìn)方案,該方法對(duì)實(shí)戰(zhàn)中雷達(dá)干擾資源的優(yōu)化分配具有一定的指導(dǎo)意義。最后對(duì)雷達(dá)偵察和干擾效果進(jìn)行了仿真實(shí)現(xiàn)。
2 雷達(dá)干擾資源優(yōu)化分配模型
在實(shí)戰(zhàn)中,為了使己方的干擾機(jī)能夠?qū)撤降睦走_(dá)進(jìn)行最大程度的壓制,更好地對(duì)我方的人員和裝備實(shí)施保護(hù),要求對(duì)我方的干擾資源進(jìn)行合理高效的分配。
當(dāng)多部干擾機(jī)對(duì)空中目標(biāo)進(jìn)行電子戰(zhàn)支援時(shí),每部干擾機(jī)進(jìn)入雷達(dá)接收端的干擾信號(hào)分別為
而雷達(dá)目標(biāo)的回波信號(hào)功率為

式中:Pt是雷達(dá)發(fā)射功率,Gt是雷達(dá)在天線主瓣方向增益,σ是雷達(dá)目標(biāo)的有效反射截面積,λ是雷達(dá)的工作波長(zhǎng),Rt是雷達(dá)到目標(biāo)的距離,A是雷達(dá)天線的有效面積。
干擾信號(hào)和目標(biāo)信號(hào)的功率比為
則干擾方程滿足:
式中:Pj是干擾機(jī)發(fā)射功率;Gj是干擾機(jī)天線主瓣方向增益;θ是雷達(dá)信號(hào)的主瓣方向和干擾機(jī)信號(hào)的主瓣方向之間的夾角;Rj是干擾機(jī)到雷達(dá)的距離;γj是干擾信號(hào)對(duì)雷達(dá)天線的極化損失;Kj是雷達(dá)正常工作時(shí)所必須的最小干信比。
雷達(dá)接收機(jī)輸入端干擾和信號(hào)的功率比為

當(dāng)干擾與信號(hào)功率比大于壓制雷達(dá)對(duì)信號(hào)正常接收時(shí)所必須的干擾與信號(hào)的最小功率比Kj時(shí),可得到干擾方程的一般表達(dá)式:
仿真及結(jié)論:
采用Matlab語(yǔ)言對(duì)干擾壓制區(qū)域進(jìn)行繪制,將n=(2,3)分別代入干擾方程進(jìn)行仿真。
仿真結(jié)果如圖所示,圖1(a)是一部干擾機(jī)進(jìn)行干擾時(shí)的干擾區(qū)域圖,圖1(b)是兩部干擾機(jī)進(jìn)行干擾時(shí)的干擾區(qū)域圖,圖1(c)是三部干擾機(jī)進(jìn)行干擾時(shí)的干擾區(qū)域圖。
圖1 干擾機(jī)干擾時(shí)區(qū)域圖
通過(guò)對(duì)參數(shù)θ的調(diào)整,可以計(jì)算出最小干擾距離隨參數(shù)θ的變化量,就可以得到支援干擾在多種情況下對(duì)雷達(dá)探測(cè)性能的影響程度。從得到的數(shù)據(jù)結(jié)果,得到結(jié)論:
1)在雷達(dá)、目標(biāo)、干擾機(jī)三個(gè)參數(shù)一定的情況下,干擾機(jī)對(duì)雷達(dá)的壓制效果明顯,使雷達(dá)暴露區(qū)域減小,對(duì)雷達(dá)的壓制區(qū)域增大[3]。
2)使用單部干擾機(jī)進(jìn)行干擾時(shí),天線增益近似公式適用于θ>θ0.5/2和θ≤60°~90°,在θ>θ0.5/2時(shí),可以認(rèn)為G′t/Gt≈1;θ≥60°~90°時(shí),天線平均電平變化范圍很小,可以認(rèn)為不受θ平方的影響而變化。
3)在使用多部干擾機(jī)進(jìn)行干擾時(shí),要取得更好的干擾效果,就要使干擾機(jī)對(duì)雷達(dá)實(shí)施干擾時(shí)盡可能的對(duì)準(zhǔn)雷達(dá)的主瓣;在雷達(dá)、目標(biāo)和干擾機(jī)三個(gè)參數(shù)一定時(shí),我們要選取每一部干擾機(jī)的最佳位置,使得干擾機(jī)能夠更好地保護(hù)被保護(hù)目標(biāo)[4]。這就要求合理地對(duì)干擾機(jī)資源進(jìn)行優(yōu)化分配,以取得最佳效果。
3 基于聚類的干擾效益最大化算法研究
在多部干擾機(jī)對(duì)多部雷達(dá)實(shí)施干擾時(shí),要想確定如何分配干擾資源,得到最佳干擾效益,就要對(duì)干擾資源分配算法進(jìn)行進(jìn)一步的研究[5],下面是在聚類算法的基礎(chǔ)上實(shí)現(xiàn)對(duì)干擾資源的最優(yōu)分配。
3.1 優(yōu)化流程
圖2 優(yōu)化流程圖
資源配置初期,獲得任務(wù)相關(guān)信息并建立基礎(chǔ)數(shù)據(jù)庫(kù)。在數(shù)據(jù)處理階段,對(duì)任務(wù)信息進(jìn)行聚類分解,把特征參數(shù)相似度較高的多個(gè)任務(wù)分配為一個(gè)類群[6],針對(duì)不同類群的參數(shù)信息得到不同的干擾資源配置方案。根據(jù)預(yù)先設(shè)定的閾值,檢查干擾資源的干擾效果,效果不佳的聚類方案進(jìn)行再次處理,通過(guò)對(duì)任務(wù)信息的重新聚類,獲得新的配置方案,并進(jìn)行再次檢查,直到滿足閾值條件,把新的配置方案作為資源配置的最優(yōu)方案。
3.2 基于聚類的資源分配算法
基于貼近度的雷達(dá)干擾資源分配策略[7],該方法是在多級(jí)優(yōu)化動(dòng)態(tài)資源分配算法的基礎(chǔ)上對(duì)影響雷達(dá)干擾效果的時(shí)域、空域、頻域、能量域、工作體制及對(duì)抗樣式等方面進(jìn)行了詳細(xì)分析,構(gòu)建了雷達(dá)干擾效果的評(píng)估指標(biāo)體系。最后利用Euclid貼近度原理,對(duì)干擾資源的分配策略進(jìn)行進(jìn)一步的研究。該方法易于計(jì)算機(jī)實(shí)現(xiàn),本文在此基礎(chǔ)上提出了基于FKM聚類的資源分配算法。
我們?cè)诮鉀Q資源配置的具體問(wèn)題中,把對(duì)方的雷達(dá)包括預(yù)警機(jī)的技術(shù)參數(shù)作為樣本,我方干擾機(jī)技術(shù)參數(shù)作為初始聚類中心,通過(guò)聚類算法修正聚類中心,在達(dá)到閾值條件下得到優(yōu)化后的干擾機(jī)技術(shù)參數(shù)[8]。干擾資源分配采用的FKM聚類過(guò)程如下:
1)確定聚類模型
{xi,i=1,2,…,n}表示對(duì)方組網(wǎng)雷達(dá)的樣本空間(n為樣本個(gè)數(shù)),{mj,j=1,2,…,k}表示聚類中心(k為聚類中心個(gè)數(shù)),即我方干擾機(jī)配置情況,uj(xi)表示樣本i對(duì)聚類中心j隸屬度,則隸屬度約束條件為

2)構(gòu)造目標(biāo)函數(shù)
模糊聚類準(zhǔn)則函數(shù):

其中模糊指數(shù)b>1,b越大聚類的模糊程度就越大,經(jīng)有效性實(shí)驗(yàn)其取值最佳區(qū)間為[1.5,2.5]。根據(jù)樣本與聚類中心距離最短原則構(gòu)造目標(biāo)函數(shù):
α為拉格朗日算子。
根據(jù)隸屬度約束對(duì)目標(biāo)函數(shù)求偏微分可得極值條件:

3)聚類迭代運(yùn)算
步驟一:人為決定k個(gè)聚類中心;
步驟二:運(yùn)用極值條件;

計(jì)算樣本i對(duì)聚類中心j的隸屬度;
步驟三:運(yùn)用極值條件;

把步驟二計(jì)算的隸屬度代入式(14),得到新的聚類中心;
步驟四:判斷隸屬度,如果變化則返回步驟二,如果不變化則終止。
4 基于聚類的資源分配算法應(yīng)用
為了直觀介紹資源分配算法聚類過(guò)程,下面模擬多目標(biāo)雷達(dá)任務(wù)干擾資源案例簡(jiǎn)述實(shí)現(xiàn)過(guò)程。表1為對(duì)方組網(wǎng)雷達(dá)的樣本數(shù)據(jù)。
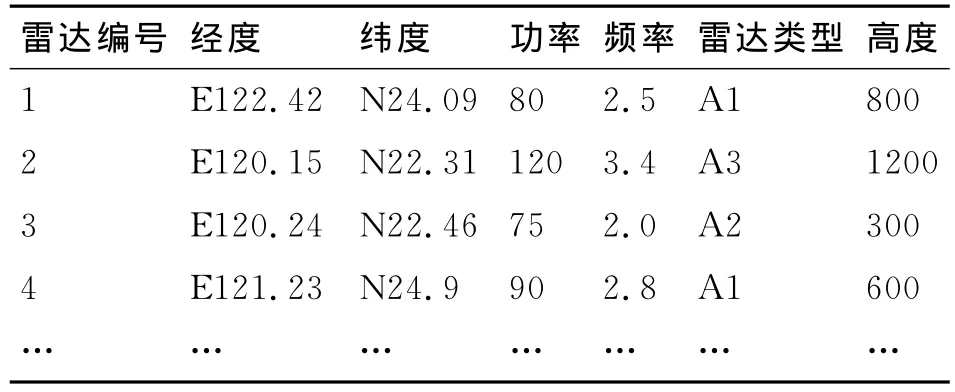
表1 對(duì)方組網(wǎng)雷達(dá)的相關(guān)數(shù)據(jù)
通過(guò)觀察分析,對(duì)方組網(wǎng)雷達(dá)的相關(guān)數(shù)據(jù)不但和經(jīng)度、緯度、功率相聯(lián)系,而且還與雷達(dá)類型、高度有關(guān)。其中經(jīng)度、緯度、功率、頻率為數(shù)字形式描述,雷達(dá)類型為文字形式描述,同類雷達(dá)往往在技術(shù)參數(shù)上比較接近。由此可以初步制定組網(wǎng)雷達(dá)聚類方案:步驟一,以雷達(dá)類型進(jìn)行第一次樣本分類,找出同類型的雷達(dá)。步驟二,以同類型的多部雷達(dá)為樣本,經(jīng)度、緯度、功率、頻率等相關(guān)信息的記錄為參數(shù),進(jìn)行聚類。
設(shè)定聚類條件:雷達(dá)類型=A1,對(duì)當(dāng)前雷達(dá)樣本進(jìn)行分類,得到符合條件的雷達(dá)樣本空間。
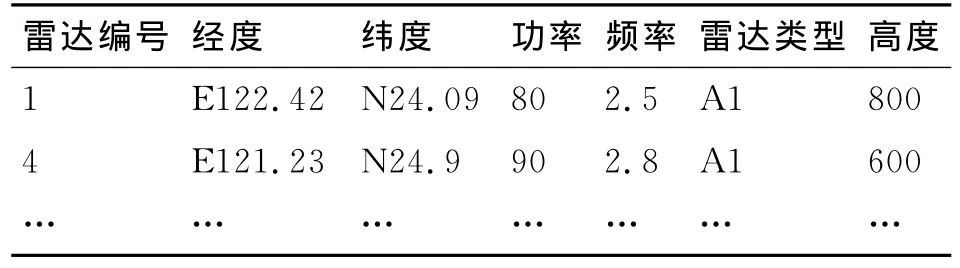
表2 聚類樣本空間
4.1 對(duì)樣本空間進(jìn)行層次(AHP)聚類[9]
1)設(shè)定初始值
類群數(shù)k等于表2中樣本個(gè)數(shù),對(duì)樣本的經(jīng)度、緯度、功率、頻率等參數(shù)進(jìn)行歸一化處理,初始化閾值系數(shù)λ為1/10。
2)迭代合并
遍歷所有類群,計(jì)算各個(gè)類群間距離:

其中xi1、xi2、xi3、xj1、xj2、xj3分別代表xi和xj的經(jīng)度、緯度和功率。計(jì)算閾值α1=dmin+λ(dmaxdmin),α2=dmax/(k-1),遍歷比較dij和α1和α2,
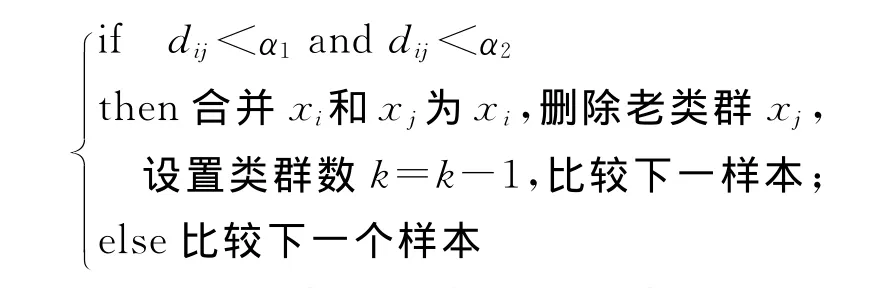
直至所有樣本比較結(jié)束,完成本次遍歷,重復(fù)2)直到所有類群都不滿足dij<α1或dij<α2,則終止合并。
4.2 對(duì)樣本空間進(jìn)行FKM聚類
1)設(shè)定初始值
聚類中心個(gè)數(shù)k和聚類中心m;由層次聚類結(jié)果決定。設(shè)置模糊系數(shù)b=2,則隸屬度函數(shù)可以表示為(樣本個(gè)數(shù)為n):

聚類中心函數(shù)可表示為

2)循環(huán)聚類
根據(jù)隸屬度函數(shù)遍歷計(jì)算隸屬度uj(xi),并依據(jù)隸屬度按照聚類中心函數(shù)計(jì)算新的聚類中心mj。判斷隸屬度,如果變化則返回循環(huán)計(jì)算,如果不變化則終止[10]。
通過(guò)上述兩次聚類的過(guò)程可以找到經(jīng)度、緯度、功率、頻率最類似的類群:

表3 當(dāng)前樣本聚類結(jié)果信息
4.3 仿真結(jié)果比較
通常同一類群的技術(shù)參數(shù)都很相似,對(duì)干擾資源配置有很強(qiáng)的指導(dǎo)性。采用聚類分群思想,綜合考慮了對(duì)方組網(wǎng)雷達(dá)的樣本空間的時(shí)域、頻域及空間信息,不斷修正我方干擾機(jī)配置參數(shù),精度和速度都達(dá)到了設(shè)計(jì)要求。仿真比較結(jié)果如圖3所示。
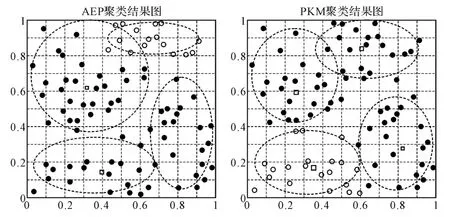
圖3 AHP與FKM算法的聚類結(jié)果比較
圖3上方部分所示為基于AHP的聚類結(jié)果,其中類群劃分的重復(fù)區(qū)域較大,該區(qū)域通常具有較大爭(zhēng)議,對(duì)類群中心的偏差具有較大影響;圖3下方部分所示為基于FKM算法的聚類結(jié)果,可以明顯看到該圖中的重復(fù)區(qū)域很大程度上得到修正,各類群的分布也相對(duì)均勻。通過(guò)上述驗(yàn)證比較可知,AHP和FKM兩種方法的分類精度確實(shí)存在一定差異,但是聚類中心的位置大致類似,可以作為相互檢驗(yàn)的依據(jù)。
AHP與FKM比較而言,前者分類結(jié)果的準(zhǔn)確度不盡如人意,后者雖然在運(yùn)算速度上存在一定不足,但是彌補(bǔ)了準(zhǔn)確度的問(wèn)題。采用AHP-FKM混合的方法可以同時(shí)彌補(bǔ)這兩種算法的不足。圖4所示Matlab分類信息即FKM算法和AHPFKM混合算法的聚類結(jié)果比較:左右圖示兩種聚類方法得到的聚類中心位置和類群劃分完全吻合。但是從目標(biāo)函數(shù)的變化曲線可以明顯看出兩種方法在回歸速度上的較大差異,左圖目標(biāo)函數(shù)在循環(huán)10次左右趨于穩(wěn)定,右圖目標(biāo)函數(shù)在循環(huán)3次左右就已經(jīng)趨于穩(wěn)定。在運(yùn)行過(guò)程中設(shè)置跟蹤節(jié)點(diǎn),可以很快跟蹤到前者循環(huán)59次終止運(yùn)算,后者循環(huán)73次終止運(yùn)算。通過(guò)實(shí)現(xiàn)圖示可以直觀的看出,AHP-FKM混合算法比單純的AHP算法具有更高的精度,相對(duì)單純的FKM算法又具有速度上的極大優(yōu)勢(shì)。
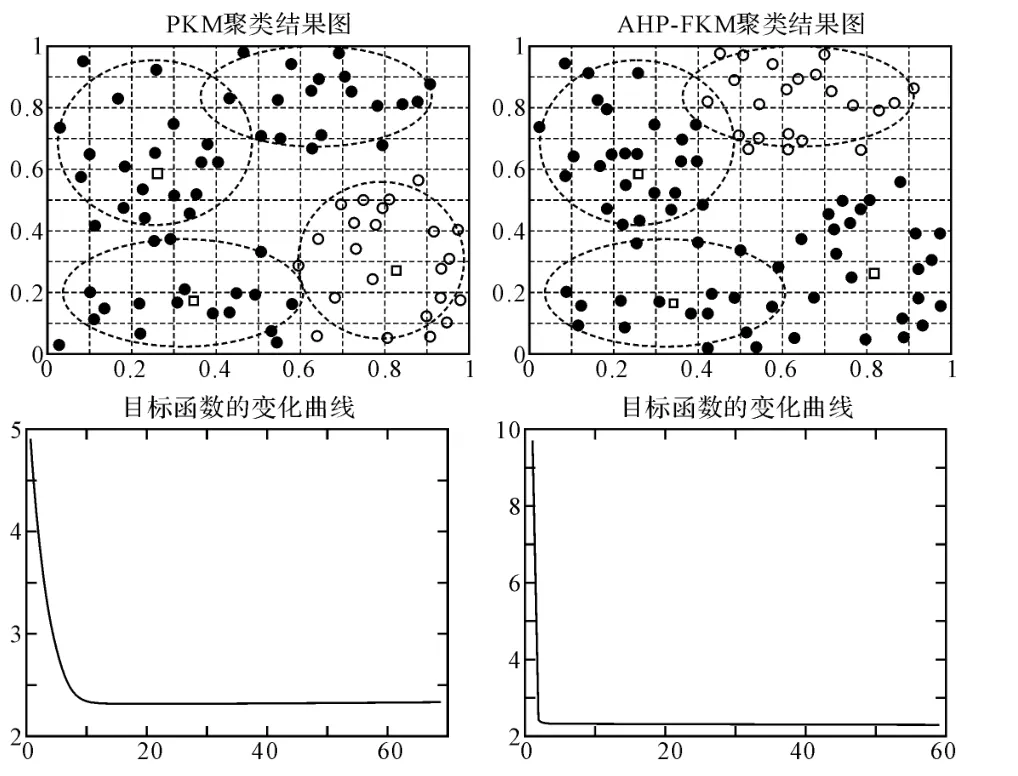
圖4 FKM與AHP-FKM混合算法分類結(jié)果比較
5 結(jié)語(yǔ)
本文研究了現(xiàn)代電子戰(zhàn)背景中雷達(dá)干擾資源的優(yōu)化分配問(wèn)題,給出了雷達(dá)干擾資源的優(yōu)化分配算法,通過(guò)計(jì)算機(jī)仿真說(shuō)明了算法的實(shí)用性。但是,由于目標(biāo)雷達(dá)的位置不同、時(shí)間不同,因此其任務(wù)權(quán)重也在發(fā)生變化。這就要根據(jù)任務(wù)的變化和需要及時(shí)考慮并調(diào)整干擾資源的分配,以使得在每一階段都能得到最佳的整體干擾效果。這樣才能使得戰(zhàn)場(chǎng)仿真更加貼近實(shí)戰(zhàn)效果,從而更好地為戰(zhàn)場(chǎng)指揮官提供科學(xué)的決策依據(jù)。
[1]郝曉軍,傅儀源,王偉,等.電子對(duì)抗中的極化方式選擇[J].電子信息對(duì)抗技術(shù),2007(4):32-36.
[2]姜寧,等.雷達(dá)干擾資源分配的模糊多屬性動(dòng)態(tài)規(guī)劃模型[J].南京理工大學(xué)學(xué)報(bào),2003(6):41-43.
[3]李朝健,肖建華.常用聚類算法比較分析[J].電腦知識(shí)與技術(shù),2007(2):11-14.
[4]黃賢鋒,張萬(wàn)軍,等.雷達(dá)干擾智能決策資源分配的一種快速算法[J].航天電子對(duì)抗,2002(6):20-22.
[5]郭小一.多策略雷達(dá)干擾資源分配方法研究[D].長(zhǎng)沙:國(guó)防科技大學(xué),2006.
[6]談江海,陳天麒.一種雷達(dá)干擾資源分配算法[J].電子對(duì)抗技術(shù),2005(5):11-13.
[7]呂永勝,王樹(shù)宗,等.基于貼近度的雷達(dá)干擾資源分配策略研究[J].系統(tǒng)工程與電子技術(shù),2005(11):22-25.
[8]楊占華,楊燕.一種基于SOM和K-Means的文檔聚類算法[J].計(jì)算機(jī)應(yīng)用研究,2006(5):15-18.
[9]黃志紅.基于層次聚類的k均值算法研究[J].電腦開(kāi)發(fā)與應(yīng)用,2009(7):22-25.
[10]顧洪博,張繼懷.聚類算法初始聚類中心的優(yōu)化[J].西安工程大學(xué)學(xué)報(bào),2010(2):13-15.
猜你喜歡
江蘇安全生產(chǎn)(2023年1期)2023-02-08 05:58:38
艦船科學(xué)技術(shù)(2022年13期)2022-08-11 09:30:02
吉林廣播電視大學(xué)學(xué)報(bào)(2021年4期)2022-01-14 02:35:48
作文成功之路·小學(xué)版(2020年5期)2020-06-11 12:48:26
鐵道通信信號(hào)(2020年9期)2020-02-06 09:15:22
數(shù)學(xué)大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學(xué)科學(xué)(學(xué)生版)(2019年5期)2019-05-21 01:00:18
小天使·一年級(jí)語(yǔ)數(shù)英綜合(2018年11期)2018-11-23 09:47:26
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年30期)2018-11-22 06:20:24
資源再生(2017年3期)2017-06-01 12:20:59