Sage-Husa隨機(jī)加權(quán)無跡卡爾曼濾波及其在導(dǎo)航中的應(yīng)用
2014-01-16 02:01:54朱長青閻海峰高社生
導(dǎo)航定位學(xué)報 2014年1期
侯 俊,朱長青,2,閻海峰,3,高社生
(1.西北工業(yè)大學(xué) 自動化學(xué)院,西安 710072;2.空軍裝備部 科研訂貨部機(jī)載處,北京 100843;3.中航工業(yè)集團(tuán) 深圳南航電子工業(yè)有限公司,廣東 深圳 518052)
1 引言
無跡卡爾曼濾波(unscented Kalman filter, UKF)是以無跡變換為基礎(chǔ),以標(biāo)準(zhǔn)卡爾曼濾波算法為框架,采用確定性采樣的一種近似線性最小方差估計方法。該算法具有實(shí)現(xiàn)簡單、濾波精度高、收斂性好等優(yōu)點(diǎn)。然而UKF要求精確已知噪聲的先驗統(tǒng)計特性,在實(shí)際應(yīng)用中,受到試驗樣本的限制或內(nèi)外部不確定因素的影響,噪聲的先驗統(tǒng)計是未知或不準(zhǔn)確的,使得傳統(tǒng)UKF的應(yīng)用受到限制。Sage濾波不需要給出動力學(xué)模型噪聲先驗協(xié)方差矩陣,就可以估計出狀態(tài)預(yù)報向量的協(xié)方差矩陣。但是,所給定的模型噪聲先驗協(xié)方差矩陣是特定時間窗口內(nèi)模型誤差的平滑值。當(dāng)動力學(xué)模型存在較大的異常擾動時,用開窗平滑法求出的狀態(tài)預(yù)測信息的協(xié)方差矩陣不能反映模型誤差的實(shí)際大小[1-4]。文獻(xiàn)[1]等提出了一種改進(jìn)的Sage自適應(yīng)濾波算法,即利用Sage濾波的開窗平滑法求得狀態(tài)預(yù)測信息的協(xié)方差矩陣,然后用自適應(yīng)因子進(jìn)行調(diào)節(jié)。但文獻(xiàn)[1]中在求觀測殘差向量和新息向量(預(yù)測殘差向量)的協(xié)方差陣時,對觀測殘差向量和新息向量均采用算術(shù)平均值法,沒有區(qū)分各個歷元觀測殘差向量值和新息向量值的大小,因而估計精度不高。隨機(jī)加權(quán)法是一種非常實(shí)用的統(tǒng)計計算方法,該方法具有計算量小、估計精度高、具有良好的大樣本性質(zhì),不需要知道統(tǒng)計量的概率分布等優(yōu)點(diǎn),被廣泛應(yīng)用于電子信息,自動控制和航空航天等領(lǐng)域?qū)Ш絽?shù)的估計。與文獻(xiàn)[1]中所采用的算術(shù)平均值法比較,隨機(jī)加權(quán)法能根據(jù)觀測信息和新息向量的有用程度,選取不同權(quán)值,增強(qiáng)對有用信息的利用,從而提高濾波解算精度。
本文在吸收Sage-Husa濾波和UKF優(yōu)點(diǎn)的基礎(chǔ)上,提出一種非線性Sage-Husa隨機(jī)加權(quán)無跡卡爾曼濾波(Sage-Husa random weighting unscented Kalman filter, SRWUKF)算法,該方法利用Sage濾波的開創(chuàng)平滑方法求得觀測殘差向量和新息(預(yù)測殘差)向量的協(xié)方差陣。然后用隨機(jī)加權(quán)自適應(yīng)因子對觀測殘差和預(yù)測殘差進(jìn)行調(diào)節(jié),對狀態(tài)預(yù)報向量的協(xié)方差矩陣進(jìn)行自適應(yīng)隨機(jī)加權(quán)估計,以控制觀測殘差和預(yù)測殘差對導(dǎo)航精度的影響。最后對UKF、自適應(yīng)無跡卡爾曼濾波(adaptive unscented Kalman filter, AUKF)和本文所提出的SRWUKF三種算法進(jìn)行了計算和比較分析。
2 隨機(jī)加權(quán)法的基本思想
設(shè)X1,X2,…,Xn是來自分布函數(shù)F(x)的獨(dú)立同分布樣本,相應(yīng)地經(jīng)驗分布函數(shù)
(1)

f(v1,v2,…,vn-1)=Γ(n),
(v1,v2,…,vn-1)∈sn-1
3 非線性Sage-Husa隨機(jī)加權(quán)極大驗后估值器
考慮如下離散非線性系統(tǒng)
(2)
式(2)中,Xk∈Rn為k時刻系統(tǒng)的狀態(tài)向量,f(·)是狀態(tài)向量的非線性函數(shù),Wk∈Rn為系統(tǒng)過程噪聲,Zk∈Rm為k時刻系統(tǒng)的量測輸出,Vk∈Rn為觀測噪聲,Bk為系統(tǒng)觀測矩陣。
假設(shè)系統(tǒng)過程噪聲Wk和觀測噪聲Vk為相互獨(dú)立,均值和協(xié)方差陣為時變的正態(tài)白噪聲序列,統(tǒng)計特性滿足
(3)
式(3)中,q和r分別為Wk和Vk的均值,Q和R分別為Wk和Vk方差陣,q、r、Q和R均是未知的,δk,j為示性函數(shù)。
則Sage-Husa的噪聲統(tǒng)計估值器為
(4)
式(4)中,dk-1=(1-b)/(1-bk),0 對于式(2)所描述的非線性系統(tǒng),根據(jù)極大驗后噪聲統(tǒng)計估值的定義,可得q,r,Q和R的算術(shù)平均值估計為 (5) 相應(yīng)地,q,r,Q和R的隨機(jī)加權(quán)估計為 (6) (7) 式(7)所表示的非線性Sage-Husa隨機(jī)加權(quán)極大驗后估計器是次優(yōu)的。 工程實(shí)際中,動力學(xué)系統(tǒng)的過程噪聲和觀測噪聲的方差陣Q和R對UKF的濾波精度有嚴(yán)重影響,這是由于Q和R決定了當(dāng)前信息和前一時刻觀測信息之間的權(quán)重。而當(dāng)前信息和前一時刻的觀測信息又將直接影響UKF的遞推精度。由此可見,動力學(xué)系統(tǒng)的過程噪聲和觀測噪聲中的任何偏差,都將導(dǎo)致濾波變?yōu)榇蝺?yōu),甚至可能出現(xiàn)發(fā)散。為此,本文提出一種非線性Sage-Husa隨機(jī)加權(quán)UKF算法,該算法的步驟為 (1)初始化 初始化后的濾波值為 (8) 和 (9) (2)計算Sigma點(diǎn) (10) 非線性變換產(chǎn)生的樣本點(diǎn)為 (11) (3)時間更新 狀態(tài)的一步預(yù)測為 (12) 一步預(yù)測均方誤差為 (13) λ=α2(n+κ)-n (14) 式中,α是很小的正數(shù),一般取10-1≤α≤1;κ=3-n;β取值與x的分布有關(guān),對于正態(tài)分布β=2最優(yōu)。 (15) (4)量測更新 (16) (17) 濾波增益為 (18) 估計均方誤差為 (19) 狀態(tài)估計值為 (20) 無人機(jī)(型號U-SN05)采用捷聯(lián)慣導(dǎo)(strap-down inertial navigation system, SINS)和合成孔徑雷達(dá)(synthetic aperture radar, SAR)組合系統(tǒng)進(jìn)行導(dǎo)航,系統(tǒng)的狀態(tài)方程和觀測方程如下所示[8-9]。 系統(tǒng)的狀態(tài)方程為 (21) 式中,f(·)為非線性函數(shù),其表達(dá)式由式(22)給出,X(t)為系統(tǒng)狀態(tài)向量,W(t)為系統(tǒng)噪聲。 (22) 噪聲系數(shù)矩陣為 (23) 系統(tǒng)噪聲向量W(t)為 W(t)=[WεxWεyWεzWεmxWεmyWεmz (24) 將氣壓高度計得到的高度信息加入到SINS/SAR組合導(dǎo)航系統(tǒng)中,得到組合導(dǎo)航系統(tǒng)的狀態(tài)量為 X(t)=[δvN,δvW,δvU,δφ,δλ,δh,φN, (25) 式中,(δvN,δvW,δvU)為速度誤差,(δφ,δλ,δh)表示位置誤差,(φN,φW,φU)為姿態(tài)誤差,(εx,εy,εz)為陀螺常值漂移,(▽X,▽Y,▽Z)為加計零偏,δhb高度計誤差。 SINS/SAR組合導(dǎo)航系統(tǒng)的量測誤差為 Z(t)=A(t)X(t)+e(t) (26) 因為SINS和SAR都可以輸出經(jīng)、緯度和航向角信息,所以,組合導(dǎo)航系統(tǒng)的量測量選為 (27) 其中 (28) (29) 式中,δpψ為SAR圖像匹配輸出的航向角誤差,δpw和δpn分別為東向和北向位置誤差,其大小依賴于所采用的圖像匹配算法的精度。RM,RN分別為參考橢球子午圈和卯酉圈上各點(diǎn)的曲率半徑。 為了測試試驗型無人機(jī)(型號U-SN05)的性能,于2012-09-21在內(nèi)蒙古某地進(jìn)行了測試飛行。無人機(jī)采用5.1節(jié)所描述的組合系統(tǒng)進(jìn)行導(dǎo)航,經(jīng)過約5 min初始化后起飛,分別進(jìn)行了轉(zhuǎn)彎、爬升、俯沖等機(jī)動飛行動作,持續(xù)飛行約56 min后完成整個飛行過程。在無人機(jī)起飛地點(diǎn)約500 m處設(shè)地面觀測站,觀測記錄無人機(jī)的實(shí)時導(dǎo)航信息,作為導(dǎo)航系統(tǒng)輸出的參考信息。 圖1 采用三種濾波算法得到的經(jīng)度誤差曲線 圖2 采用三種濾波算法得到的緯度誤差曲線 圖3 采用三種濾波算法得到的高度誤差曲線 計算結(jié)果如圖1~圖3所示。從計算結(jié)果可以看出,UKF、AUKF和SRWUKF三種算法在位置誤差解算精度上濾波性能有明顯差別。圖1中,由UKF濾波得到的經(jīng)度誤差范圍在(-23 m, 20 m)之間,誤差均值為5.425 0 m,由AUKF濾波得到的經(jīng)度誤差范圍在(-16 m, 15 m)之間,誤差均值為4.089 6 m,而SRWUKF濾波得到的經(jīng)度誤差范圍在(-11 m, 8 m)之間,誤差均值為2.614 6 m。圖2中,由UKF濾波得到的緯度誤差范圍在(-22 m, 16 m)之間,誤差均值為4.937 1 m,由AUKF濾波得到的緯度誤差范圍在(-25 m, 25 m)之間,誤差均值為4.066 8 m,而SRWUKF濾波得到的緯度誤差范圍在(-9 m, 11 m)之間,誤差均值為2.629 3 m。圖3中,由UKF濾波得到的高度誤差范圍在(-32 m, 25 m)之間,誤差均值為10.458 9 m,由AUKF濾波得到的高度誤差范圍在(-30 m, 25 m)之間,誤差均值為8.766 1 m,而SRWUKF濾波得到的高度誤差范圍在(-25 m, 25 m)之間,誤差均值為5.091 2 m。從計算結(jié)果可以看出,AUKF算法得到的位置誤差精度高于UKF算法解得的誤差精度,提出的SRWUKF算法的精度明顯高于UKF和AUKF這兩種算法。 本文在吸收Sage-Husa濾波和無跡卡爾曼濾波優(yōu)點(diǎn)的基礎(chǔ)上,利用隨機(jī)加權(quán)估計算法將傳統(tǒng)的定義在線性系統(tǒng)上的Sage-Husa噪聲估計方法推廣到非線性系統(tǒng)中,提出一種非線性Sage-Husa隨機(jī)加權(quán)無跡卡爾曼濾波算法。該方法利用Sage濾波的開窗平滑方法求得觀測殘差向量和新息向量的協(xié)方差陣,并用隨機(jī)加權(quán)自適應(yīng)因子對觀測殘差和預(yù)測殘差進(jìn)行調(diào)節(jié),以控制預(yù)測殘差和預(yù)測殘差對導(dǎo)航精度的影響。并將提出的非線性Sage-Husa隨機(jī)加權(quán)UKF算法應(yīng)用到SINS/SAR組合導(dǎo)航系統(tǒng)中進(jìn)行計算,結(jié)果表明提出算法的濾波精度明顯優(yōu)于UKF和自適應(yīng)UKF算法,提高了導(dǎo)航系統(tǒng)的精度。 [1] YANG Yuan-xi, XU Tian-he.An Adaptive Kalman Filter Based on Sage Windowing Weights and Variance Components[J].The Journal of Navigation, 2003, 56(2):231-240. [2] GAO Wei-guang, YANG Yuan-xi, CUI Xian-qiang,et al.Application of Adaptive Kalman Filtering Algorithm in IMU/GPS Integrated Navigation System[J].Geo-spatial Information Science, 2007, 10(1):22-26. [3] YANG Yuan-xi, GAO Wei-guang.An Optimal Adaptive Kalman Filter[J].Journal of Geodesy, 2006, 80(4):177-183. [4] GAO She-sheng, ZHONG Yong-min, SHIRINZDEH Bijan.Random Weighting Estimation for Fusion of Multi-dimensional Position Data[J].Information Sciences, 2010, 180(4):4999-5007. [5] GAO She-sheng, GAO Yi, ZHONG Yong-min.Random Weighting Estimation Method for Dynamic Navigation Positioning[J].Chinese Journal of Aeronautic, 2011, 24(3):318-323. [6] GAO She-sheng, ZHONG Yong-min.Random Weighting Estimation of Kernel Density[J].Journal of Statistical Planning and Inference, 2010, 140(9):2403-2407. [7] GAO She-sheng, FENG Zhi-hua, ZHONG Yong-min, et al.Random Weighting Estimation of Parameters in Generalized Gaussian Distribution[J].Information Science, 2008, 178(9):2275-2281. [8] ZHONG Yong-min, GAO She-sheng, LI Wei.A Quaternion-based Method for SINS/SAR Integrated Navigation System[J].IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(1):514-524. [9] GAO She-sheng, ZHONG Yong-min, ZHANG Xue-yuan,et al.Multi-sensor Optimal Data Fusion for INS/GPS/SAR Integrated Navigation System[J].Aerospace Science and Technology, 2009, 13(4-5):232-237.4 Sage-Husa隨機(jī)加權(quán)UKF算法


5 算例與分析
5.1 SINS/SAR組合導(dǎo)航系統(tǒng)數(shù)學(xué)模型

W▽XW▽YW▽ZWΨxWΨyWΨzWhb]T
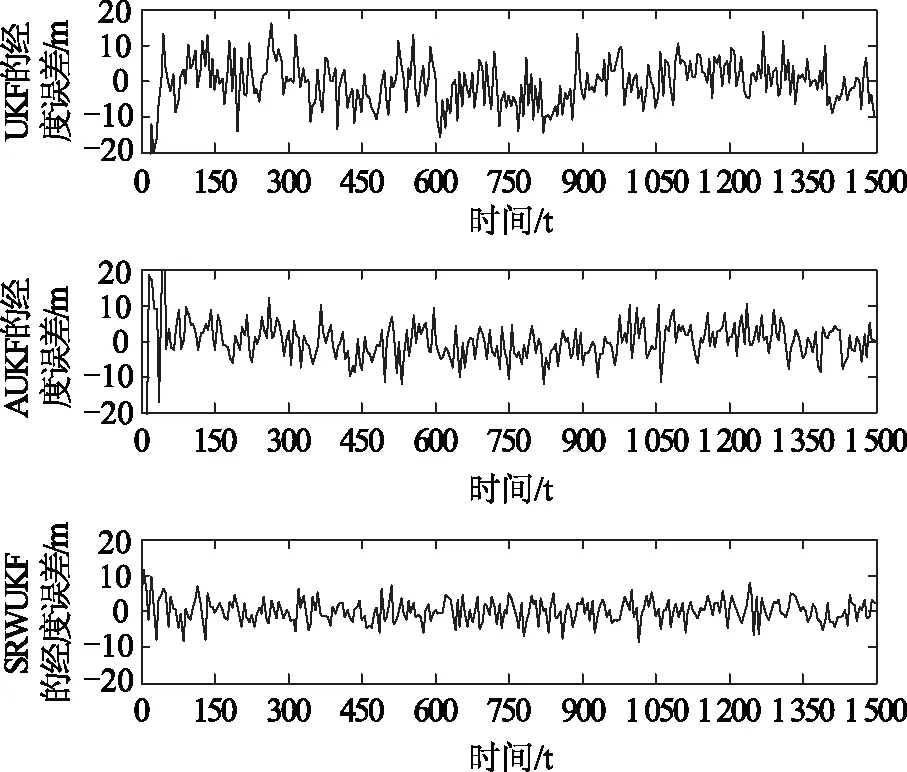
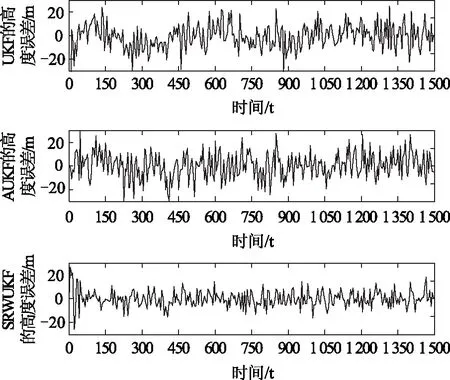
φW,φU,εx,εy,εz,▽X,▽Y,▽Z,δhb]T5.2 計算與分析
6 結(jié)束語