基于顏色對抗和旋轉對稱的路標檢測算法
2014-01-15 10:00:40黃躍凱吳達德
電子設計工程 2014年19期
關鍵詞:檢測
黃躍凱,徐 丹,曾 昊,吳達德
(江蘇科技大學 計算機科學與工程學院,江蘇 鎮江 212003)
交通標志可以制定行為規則、告知路況,對行車和行人給與指導或警告,在日常交通中具有至關重要的作用。除此之外,交通標志的自動檢測與識別作為自動駕駛和智能車輛視覺感知系統的一部分也受到越來越多的關注[1-3]。然而,以下原因導致路標檢測成為較具挑戰性的工作:1)顏色信息容易受光照和天氣影響;2)交通事故或極端天氣會使路標旋轉、變形;3)嘈雜環境下交通標志容易淹沒于背景中。
由于交通標志具有明顯的顏色和形狀特征,現有的交通標志檢測方法多以顏色分割和形狀分析為主。基于顏色閾值的算法首先選定一個作者認為合適的顏色空間然后借助閾值將路標和背景區分開來。在[3]中,作者以紅色為參照顏色將RGB顏色分量歸一化,然后采用固定的閾值進行分割。在[4]中,作者選擇CIElab空間因為此顏色空間可以單獨處理顏色和強度信息。文獻[1]則選擇對光照不敏感的HIS顏色空間。然而顏色空間的轉換消耗了算法的實時性。對此,Gómez-Moreno做了細致的比較,認為歸一化的RGB空間改進算法性能的同時保證了較低的計算代價[5]。
在形狀檢測方面Barners和他的同事做了很優秀的工作。其在[6]中提出利用徑向對稱變換檢測圓的算法,之后此方法被推廣至八邊形、矩形和三角形[7]。徑向對稱變換是一種單變量的轉換,每一個邊緣點獨立于其鄰域單獨向多個累加器投票,這就導致了較高的虛警率。為了解決這個問題Belaroussi和Tarel提出了BCT算法,采用成對的梯度向量向其中點投影的方法找出多邊形的中心[8],遺憾的是這種方法不適用于三角形。
以上算法雖然在特定的情況下取得了較好的檢測效果,仍然存在著在計算量大和魯棒性差的不足。本文提出利用顏色對抗性突出紅色和黃色區域,從復雜的背景中提取出交通標志。另外,采用旋轉對稱投影的方法確定路標的中心和尺度。最后結合形狀分析進一步區分路標類別并降低虛警率。
1 顏色對抗性
在人眼的視覺機制中存在著相互對立的顏色對,如黑/白,紅/綠,黃/藍。Itti在其顯著性模型中首先歸一化紅、綠、藍、黃各分量,然后利用顏色對抗性創建紅綠,藍黃顏色特征圖。Woong-Jae Won等人進一步提出顏色對比圖的概念,這種顏色對比圖能夠突出紅色、黃色和藍色區域。在此基礎上,我們改進了黃色分量的歸一化方法以及顏色對比圖的生成方法,改進后的算法能夠更明顯的突出紅色和黃色區域,同時保持藍色區域與[10]中的算法效果相同,如圖1所示。
顏色分量歸一化公式為:
顏色對比圖生成公式為:

2 旋轉對稱中心投影
2.1 旋轉對稱
對于任意一對不平行的點向量(pi,pj),總存在一個點p使得pi圍繞其旋轉一定角度后pj與完全重合,則p是pi和pj的旋轉對稱中心。 記為 rc(pi,pj)=p。 圖 2 表示了 pi,pj和旋轉中心p之間的關系。p可由公式(3)得到。

式中,xi,yi是 pi的坐標,γ 是 pipj連線與水平方向的夾角,可以由pi和pj的坐標計算得到。r是pi,pj與p之間的距離,可由公式(4)得到。

圖1 顏色對比圖Fig.1 Contrast images

圖2 點向量pi,pj的旋轉對稱中心Fig.2 Rotational center of point vectors piand pj

式中,d 是 pi與 pj之間的距離。分別用 φi,φj表示 pi,pj的梯度方向,則有
至此,公式(3)的未知量都得到求解。
2.2 旋轉中心投影
警告路標可近似為等邊三角形,符合角度為的旋轉對稱,即等邊三角形的任一邊和頂點旋轉2π/3后與另一邊和頂點完全重合。通過梯度方向相差2π/3的點對向其旋轉中心投影可以確定等邊三角形的位置和尺度。圓形滿足任意角度的旋轉對稱,此種方法也可以同時檢測圓形路標。對旋轉中心投影的強度采用廣義對稱變換的對稱強度計算方法。
對于圖像中的任一點p,定義向量集合

p點的投影累加器定義為:

C(i,j)是點對(pi,pj)對其旋轉對稱中心投影的強度大小,與點對之間的距離、點對之間的梯度方向以及點對的梯度強度有關。具體表示如下:

式中D(i,j)為距離權重函數,在GST中采用的是連續函數,權重隨‖pipj‖的增大而減小。本文采用離散函數來表示,將路標的尺度限制在固定的范圍[Rmin,Rmax]內。距離權重函數表示如下:

Φ(i,j)是方向權重函數,圓形和三角形均滿足角度為 2π/3的旋轉對稱,因此只有梯度方向相差2π/3的點對才能向其旋轉中心投影,定義如下:

式中δ是很小的角度,小于這個角度可以認為|φj-φi|和2π/3大致相等,本文中 δ取 π/18。 ri,rj是梯度強度的函數,定義為 ri=log(1+‖ni‖),ni是 pi的梯度向量。
另外,定義累加器diam,在對中心p進行投影的同時,累加投影點對的距離。投影結束后,利用式(11)計算多邊形的大致尺度。

式中N為向中心p投影的點對的數量。
綜上,旋轉中心投影的過程如下:
(1)求灰度圖(顏色對比圖)的梯度。為降低計算量同時減少噪聲的影響,忽略幅值過小的梯度。
(2)尋找滿足距離和梯度方向條件的點對。這個過程非常耗時,如果沒有任何優化其時間復雜度為O(m2),m為圖像中的像素數。為了加快算法的執行速度,將像素的梯度方向(-π,π)均勻分為36個子集,即δ取π/18。對于特定子集中的點,其對應點在與其相差12的子集中。找到滿足梯度方向的點對后再用距離條件進一步減少點對的數量。
(3)對于每對點對利用式(3)找到其旋轉對稱中心,以ri,rj為權重向中心投影。最終的投影圖像是與原圖像尺寸相同的灰度圖,投影圖中亮度最大的點即為多邊形的中心。如圖3所示。
(4)利用式(11)計算多邊形的尺度信息。

圖3 投影結果Fig.3 Voting results of input images
3 形狀分析
這里采用多邊形的邊數NumSides進一步區分目標形狀。為了得到Numsides,需要計算從多邊形中心到邊界的距離,這里用d來表示。如圖4所示,在頂點處d有最大值然后逐漸減小,在邊的中點達到最小。因此,從中點到邊界點的距離呈拋物線狀,波谷代表從中心到邊中點的距離,波峰代表從中心到頂點的距離,拋物線的峰-谷數代表了多邊形的邊數。需要注意的是,向中心投票的點中不光有邊界點,還有路標內部的點以及背景中的噪聲點,在計算NumSides之前首先提取路標的邊界點,如圖5所示。
4 實驗結果與分析
4.1 實驗結果
為了驗證本方法的有效性和實時性,在實景拍攝的交通標志圖片庫上進行實驗。該圖片庫主要由項目組利用Canon Digital IXUS 65相機采集,還有一部分禁止路標由于其通用性,采用了西班牙研究者提供的圖片(http://agamenon.tsc.uah.es/)。所有圖片的大小均為640*480,包括多種天氣和光照情況下的交通標志。實驗結果如圖5所示。

圖4 計算多邊形邊數Fig.4 Computing polygons’side number

圖5 禁止標志檢測Fig.5 Detection of prohibition sign
圖5 顯示了所提算法檢測交通標志的流程和結果。(a)是輸入圖像。(b)是顏色對比圖,經過顏色對抗性處理紅色區域被明顯提升。(c)根據經驗值排除面積和縱橫比不和理的區域。對于面積閾值的設定,以圖像的高、寬中較小的為參照標準,排除尺寸小于其1/20或大于其2/3的區域。區域的縱橫比限制在1/1.9至1.9之間[1]。(d)滿足條件的點對向其旋轉中心投影后的圖像。(e)顯示向中心投影的各點的位置,并標出邊界。(f)邊界到中心的距離曲線。
4.2 性能分析
本實驗中采用278張圖片中的40種共366個有效交通標志進行測試。根據檢測的難易程度,分別將警告和禁止標志分為4類,如圖6所示。測試結果如表1,2所示。
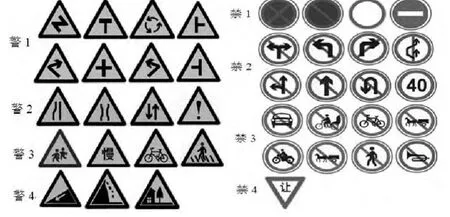
圖6 禁止標志和警告標志分類Fig.6 Categories of prohibition and warning signs
警告標志的第1類和第2類內部符號比較簡單,經過顏色對抗處理后可得到完整的三角形,故其檢測率較高。第3類警告標志相對復雜,但沒有影響到三角形的邊緣。第4類難度最大,圖符內容影響了邊緣的完整性,在成像條件好的情況下可以成功檢測,在路標過小或光線較暗的情況下會漏檢。由表1可見,警告標志的檢測率和漏檢率分別為93.6%和6.4%。禁止標志的紅色圓形邊框能夠形成明顯的投影中心,檢測結果明顯優于警告標志,分別為96.7%和3.3%。整個系統的測試結果如表2所示:算法的檢測率為95.4%,漏檢率為4.6%,虛警率為4.2%。算法虛警率主要來源于路邊的圓形廣告牌以及與交通標志顏色相近的車輛。
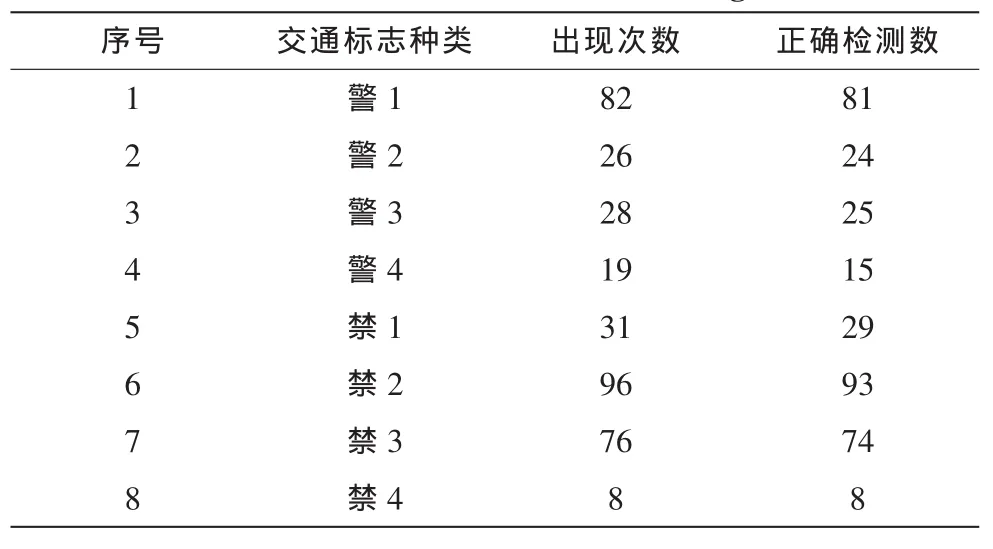
表1 交通標志分類檢測結果Tab.1 Detection result of traffic signs
系統采用C++語言在2.59 GHZ,Pentium IV機器上編程實現,平均每幅圖像耗時98 ms,即每秒10幀,以車輛60 km/h的速度計,本算法滿足實時要求。
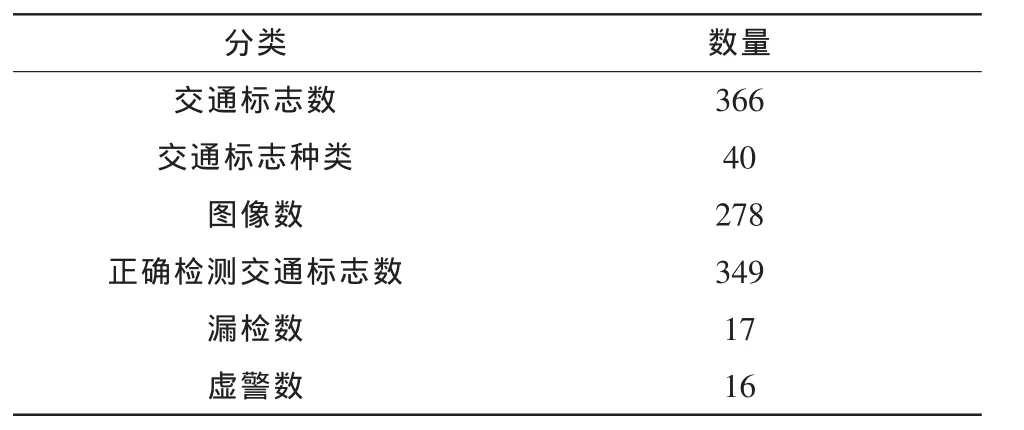
表2 檢測結果統計Tab.2 Statistic of detection result
5 結 論
文中提出了一種基于顏色對抗性和旋轉中心投影的實時路標檢測方法。該方法有效規避了基于顏色的算法對光照敏感以及基于形狀的算法實時性不高的問題,在滿足實時要求的情況下取得了較好的檢測結果。通過實驗驗證了以下結論:
1)在實驗數據集上達到95.6%檢測率和4.4%的漏檢率。2)在Pentium IV平臺上利用 C++編程,達到 10幀/秒的處理速度,滿足實時處理的要求。3)利用形狀分析,進一步區分路標的形狀,減少識別階段的工作量。4)對光照、旋轉、尺度變化有一定的不變性。綜上,該方法能夠滿足智能車輛安全行駛時交通標志檢測的實時性和魯棒性要求,并為交通標志的識別提供準確的位置和尺度信息。
[1]Maldonado-Bascn S,Lafuente-Arroyo S,Gil-Jimnez P,et al.Road-sign detection and recognition based on support vector machines[J].IEEE Trans.Intell.Transp,2007,8(2):264-278.
[2]繆小冬,李舜酩,沈峘,等.基于對抗色的交通標志檢測方法[J].儀器儀表學報,2012,33(1):56-61.MIAO Xiao-dong,LI Shun-ming,SHEN Huan,et al.Opponentcolor based traffic sign detection[J].Chinese Journal of Scientific Instrument,2012,33(1):56-61.
[3]Xu D,Tang Z,Yan X.Real time road sign detection based on rotationalcenter voting and shape analysis[C]//Mechatronics and Automation (ICMA), 2012 International Conference on.IEEE,2012:1972-1977.
[4]Khan J F,Bhuiyan S M A,Adhami R R.Image segmentation and shape analysis for road-sign detection[J].IEEE Trans.Intell.Transp,2011,12(1):83-96.
[5]Gomez-Moreno H,Maldonado-Bascon S,Gil-Jimenez P,et al.Goal Evaluation of Segmentation Algorithms for Traffic Sign Recognition[J].IEEE Trans.Intell.Transp,2010,11 (4):917-930.
[6]Barnes N,Zelinsky A.Real-time radial symmetry for speed sign detection[J].in Intelligent Vehicles Symposium,2004 IEEE,2004:566-571.
[7]Barnes N,Loy G,Shaw D.The regular polygon detector[J].Pattern Recognition,2010:592-602.
[8]Belaroussi R,Tarel J.A real time road sign detection using bilateral Chinese transform[J].Advanced in Visual Computing,2009:1161-1170.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
