協同定位中用戶可定位性分析
2014-01-10 01:47:18劉亞寧李廣俠田世偉
導航定位學報 2014年3期
關鍵詞:用戶
劉亞寧,李廣俠,常 江,田世偉,劉 冰
(1.解放軍理工大學 通信工程學院,南京 210007;2.中國科學院 光電研究院,北京 100094)
1 引言
目前,全球衛星導航系統(global navigation satellite system,GNSS)由于具有精度高、覆蓋范圍廣以及可全天候工作等優勢,已成為應用最為廣泛的導航定位技術。在開放環境中,基于GNSS的單點定位技術相對成熟,定位精度也在不斷提高。一般情況下,只要地面節點能夠收到4顆及4顆以上衛星的信號,都能夠實現單點定位[1-7]。但在一些惡劣環境下,如室內、城市峽谷以及森林等一些被遮蔽的環境,由于缺少足夠多的可見衛星,單點定位無法實現。
協同思想在人類社會中源遠流長,協同學作為一個科學概念被正式提出是在20世紀70年代。在生物學領域,協同進化能大大加快生物進化的歷程;在計算領域,協同進化算法為研究者開辟了廣闊的空間;在通信領域,協同不僅能提高單個設備的傳輸效果,而且能夠顯著提升無線系統的整體性能。鑒于協同思想在其他領域所取得的成果,定位導航領域也出現了協同定位的概念。
協同定位的概念最早由文獻 [8]在1996年提出,主要用于實時獲取移動機器人的位置信息。其主要做法是,將機器人編為兩個組,一個組移動的時候,另一組作為地標保持靜止,輔助前一個組的移動。在實驗過程中,兩個組再不斷交換角色,直至到達目標位置。如今,節點之間的協同定位概念已經延伸到利用節點之間的通信及測量信息等輔助單個節點定位。相比增加 “偽衛星”、錨節點的高代價,協同定位不僅開銷小,而且能縮短首次定位的時間,提高單點定位的精度,提高系統的魯棒性,改善整個系統的定位性能。協同技術在定位領域中的許多方向已經取得了一定的成果,如無線傳感網(wireless sensor network,WSN)定位[9]、多機器人協同定位[10]等。在衛星定位中,關于協同技術的研究尚不是很多,主要集中在協同定位的理論定位精度及一些協同定位算法,文獻 [11-12]做的研究工作具有代表性,此外,節點的可定位性也有了一定的研究[13]。
傳統的GNSS定位研究主要考慮的是單點定位問題。關于單點定位下的位置解算,文獻 [3]于1984年提出了一種解法。基于Lorentz內積公式,文獻 [3]提出了一種偽距方程組的矩陣解法。該解法計算效率高,并且不需要初始位置信息,定位方便、快捷。與此算法類似,本文提出了一種在兩點協同場景下的定位算法。
本文研究協同定位中的一個具體場景:兩點協同模型,以更好地對協同定位問題進行理解。通過假設兩個未知節點之間可以相互通信及測量,能夠得到節點之間的高程差信息以及相對距離信息。同時利用用戶解算出的其與衛星之間的偽距信息,本文提出了一種新的算法,能夠同時解算出兩個節點的實際位置以及它們與衛星時鐘的鐘差。本文的主要貢獻是分析并證明了單個不能定位的用戶通過協同能夠實現定位,同時,分析了協同定位的可定位性,為以后的多點協同定位以及整個網絡的協同定位的研究提供了參考。
本文內容安排如下。第二部分回顧了用戶單點定位的模型,并總結了目前存在的幾種解法,同時對各種解法之間的差異以及他們的優勢進行了比較。考慮到一些惡劣環境中,可見衛星少,單點定位可能無法實現。本文第三部分研究了協同定位中的一個具體場景:兩點協同定位。并建立了協同模型,設定了協同的形式及內容。第四部分為理論證明工作,證明了兩個原本都不能實現定位的節點,經過協同,能夠實現定位。用戶可定位性提高的仿真證明出現在第五部分。第六部分為本文總結及下一步的工作。
2 單點定位回顧
2.1 單點定位原理
GNSS單點定位利用地面單個用戶接收到的衛星信號,通過對信號進行處理和解算,得到衛星的精確坐標以及衛星與用戶之間的偽距信息。根據接收到的一組偽距建立偽距方程組,并對方程組進行求解得到用戶的3維坐標以及鐘差。由于有4個未知數,必須要有4個或4個以上方程組,即單點能接收到4顆及以上衛星的信號如圖1所示時,才有可能得到一組解。
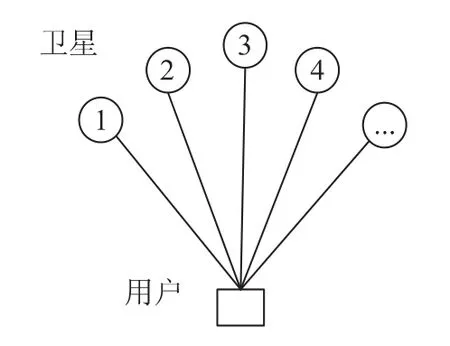
圖1 用戶至少能接收到4顆衛星的信號
2.2 單點定位的幾種解法
單點定位問題從20世紀80年代起,得到了很多學者的關注,經過30多年的研究,出現了一大批研究成果[1-7]。下面將對這些方法進行比較,給出它們的差異以及各自的優勢。
文獻 [1-2]是一種全球定位系統(global positioning system,GPS)偽距方程的迭代解法。通過估計用戶的初始位置,運用牛頓迭代法,經過3到5次迭代,就能得到用戶的精確位置。這種方法易于理解,但計算量較大,第一次定位時初始位置不容易估計,同時,在深空等其它環境還可能收斂到一個錯誤的解。
文獻 [3-7]提出了偽距方程的代數解。基于Lorentz內積公式,文獻 [3]提出了一種GPS偽距方程的代數解,該解法思路清晰,計算簡單,不需要估計初始位置,但文獻 [6]已經證明了,即使在衛星星座條件非常好的情況下,運用這種解法,也可能得到多個解。基于線性差分方法,文獻 [4]利用測得的用戶與衛星之間的距離差,經過矩陣變換、求逆,能夠得到一組代數解。該解法計算過程較復雜,但由于矩陣求逆的最高階為二,相對于上一種方法,計算量較小。
文獻 [5]討論了GPS方程解的存在性和唯一性條件。通過該文獻知道,在接收到4顆衛星的情況下,解的存在性和唯一性都不能保證。即使在有5顆衛星的情況下,考慮到衛星可能存在的共面情況,解的唯一性也不能保證。這為接收機的設計者提供了一個很好的提示,在一些特殊情況下,為了實現準確定位,需要額外的偽距信息或者其它信息來輔助定位,這也為協同定位提供了一個很好的應用場景。文獻 [6]對比了距離方程和偽距方程。考慮到偽距方程中用戶與衛星之間的鐘差,不同的鐘差會導致衛星-用戶之間的幾何學構型的不同。該文獻闡述并證明了距離方程是歐式距離方程,而偽距方程是歐式距離差方程。求解距離方程用的是球面或者平面交點法,而偽距方程是旋轉雙曲面交點法。通過將方程解分為線性解和非線性解兩部分,本文獻還討論了方程組解的穩定性。通過將雙曲面之間的交線問題轉化為雙曲面和平面之間的交線問題,文獻 [7]從三維角度提供了一種偽距方程的解法。該解法適用于衛星星座退化等其他特殊場合,同時還能分析定位解存在性和唯一性條件。
2.3 從單點定位到多點協同定位
以上分析了單點定位的原理以及針對偽距定位方程的多種解法。但對于許多惡劣環境,由于缺少足夠多的可見衛星,單點定位無法實現。在一些受到有意無意干擾的環境中,單點定位的可行性和準確性也無法保證。同時,當用戶處于深空中或者靠近衛星時,單點定位也可能出現錯誤的結果[14]。
在這些需求的刺激下,多點協同定位應運而生。通過協同,可以得到幾個用戶之間的距離、時鐘差、信噪比以及多普勒頻移等信息[15]。在這些信息的輔助下,可以使原本不能定位的單個節點在經過幾個點之間的協同之后,能夠實現定位。
本文就協同定位中的一個具體場景,兩點協同的模型,進行了分析和討論。本文假設兩個用戶之間能夠測得距離信息,同時還假設用戶之間時鐘差信息先驗已知。通過建立協同模型,以及對模型的分析求解,可以得到兩點的協同解,以及解的存在和唯一性條件。
3 模型建立
從文獻 [5]可知,用戶收到5顆及以上衛星信號,一般都能實現定位,收到4顆衛星信號時,可能有多個定位解也可能無解,因此,必須對接收衛星的星座結構進行分析,判定是否能夠實現定位。若用戶收到少于4顆星,如3顆,單個用戶本身不能定位。本場景考慮兩個用戶各能收到3顆星,且這3顆星互不相同,通過兩點的測距和通信,判斷是否能夠實現定位。
如圖2所示,A、B兩用戶均只能接收到3顆衛星的信號。按照傳統的衛星定位方法,由于缺少足夠的條件,兩個用戶均不能實現定位。協同定位的思想如圖3所示。在這種場景中,兩個用戶除了接收衛星信號外,還能通過自身其他的硬件設備,實現測距和通信。通過兩者之間的信息交互,可以得到它們之間的距離以及時鐘差。在第四部分中,就將證明,通過用戶之間的協同,兩個原本都不能定位的用戶能夠實現定位。同時,第四部分還分析了用戶不能定位的條件,對協同可定位性進行了初步分析。
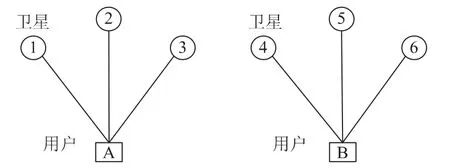
圖2 用戶A、B單獨工作時,均不能定位
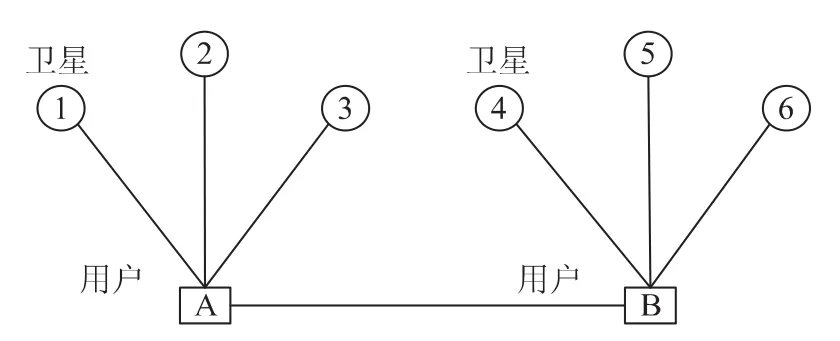
圖3 通過協同,A、B兩用戶均能定位
在上面兩個圖中,①、②、③,④、⑤、⑥表示用戶能看到的兩組衛星,A,B表示兩個用戶。設xi,yi,zi(i=A,B,1…6)分別表示各點的坐標,ti(i=1…6)表示衛星到用戶之間的偽距,用戶A與各衛星之間的鐘差為b1,用戶B與各衛星之間的鐘差為b2,通過協同,A與B之間的時鐘差已知,即b1=b2+c,c為常數,同時A與B之間的距離h也已知。
4 模型的求解
由衛星偽距方程知道,對于用戶A有以下方程成立

同樣對于用戶B,有

另外,通過A、B之間的測距以及通信,可以得到另外兩組關系式
將方程(1)移項,展開得
令矩陣

則上式可以表示為

由上式可知,i=1,2,3時有三個方程。
聯立以上三個方程式,得到一個用矩陣表示的方程
設BBT=λ則
從(7)式可以得到

此處進行協同定位可定位性的第一次判斷,若三維矩陣(A1A2A3)T可逆,則能夠實現協同定位,若三維矩陣(A1A2A3)T不可逆,則說明這3顆衛星的星座結構不理想,不能實現協同定位。
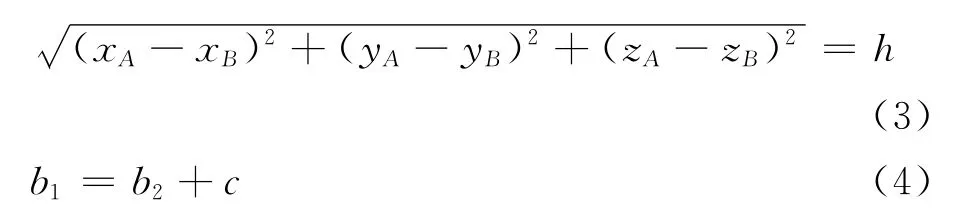
將式(8)代入BBT=λ,可以解出未知數λ,再將λ代到式(8),可以得到B,從而可以得到xA,yA,zA與b1之間的關系。同理,由式(2)可以得到xB,yB,zB與b2之間的關系。將xA,yA,zA與b1之間的關系,xB,yB,zB與b2之間的關系代回到

可以得到一個b1與b2之間關系式。
又因為b1=b2+c,由以上兩個b1與b2之間關系式,通過解二元一次方程,可以解出b1與b2的值,再將它們代回到xA,yA,zA與b1之間的關系式以及xB,yB,zB與b2之間的關系式中,可以求得xA,yA,zA與xB,yB,zB的具體值,即能夠實現對兩個用戶A與B的定位。
此處進行協同定位的第二次判斷,若方程組有解,則表示能夠進行協同定位,若方程組無解,則說明這6顆衛星星座結構不理想,不能進行協同定位。
5 仿真驗證
為了研究協同定位的可定位性性能,考慮兩個用戶協同定位的情況,本文將分別分析兩個用戶非協同定位以及協同定位的場景。在仿真中,假設A、B兩個用戶所處的經緯度坐標分別為(116.218,35.33),(116.318,35.43)。由 于 森林覆蓋或者高樓阻擋等原因,假設A、B各能接收到三顆衛星的信號,分別為GPS_BIIA-22、GPS_BIIA-27、GPS_BIIR-06以及 GPS_BIIA-25、GPS_BIIRM-5、GPS_BIIRM-2,如圖4所示。仿真時間為 2013-07-02T09:20:00—11:00:00。在仿真中,每60s記錄一次衛星的位置以及用戶與衛星之間的距離信息。同時,如果仿真中測得的用戶位置與用戶的真實位置誤差小于10m時,認為用戶是可以定位的。
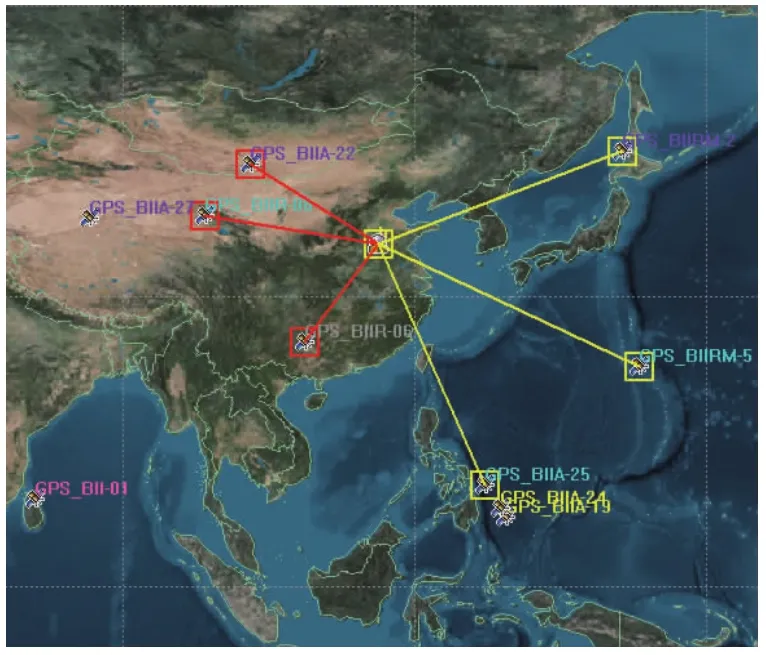
圖4 用戶協同定位場景
圖5比較了協同定位和非協同定位情況下用戶的可定位性。在非協同定位場景中,由于每個用戶單獨定位且只能接到3顆衛星的信號,而這里有4個待求解量(即用戶的三維坐標x,y,z以及鐘差b),顯然,用戶不能被定位。在協同定位場景中,用戶不僅能接收到衛星信號,用戶之間還能通過協同得到額外的定位信息觀測量,如用戶之間的時鐘差、用戶之間的距離等。仿真結果證明,協同定位可以很大程度提高用戶的可定位性。當協同用戶組數增加到500時,用戶的可定位性可以提高到98%。
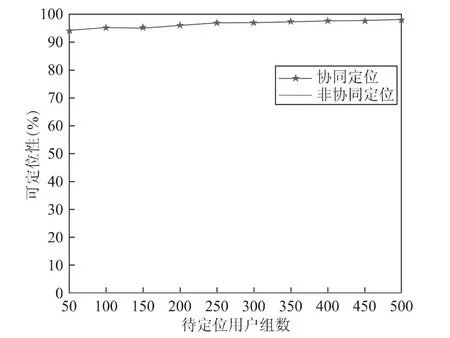
圖5 協同與非協同場景下用戶可定位性比較
6 總結及進一步研究方向
本文回顧了單點定位的模型,總結了單點定位存在的幾種解法,并對他們進行了對比,分析了各自的優勢。就衛星協同定位中的一個具體場景:兩個用戶的協同,建立了用戶之間通過測距和通信進行協同的模型,分析了用戶的可定位性,給出了定位解。本文為多用戶協同定位中可定位性的分析提供了參考。
下一步會進一步研究和探討兩點協同定位。在協同的內容和方式上,會考慮更容易實現,更便于計算的方法,還要確保能夠達到更高的定位精度。同時,還會將兩點協同定位擴展到多點協同定位,并最終將考慮整個網絡的協同定位中可定位性的問題。
[1] MAO Xu-chu,WADA M,HASHIMOTO H.Nonlinear Iterative Algorithm for GPS Positioning with Bias Model[C]//Proceedings of the 7th International IEEE Conference on Intelligent Transportation Systems.Washington,WA:IEEE,2004:684-689.
[2] MARTIN E H.GPS User Equipment Error Models(User Equipment)[J]//Navigation,1978,25(2):201-210.
[3] BANCROFT S,KING R D.An Algebraic Solution of the GPS Equations[J].IEEE Transactions on Aerospace and Electronic Systems,1985,AES-21(1):56-59.
[4] KRAUSE L O.A Direct Solution to GPS-type Navigation Equations[J].IEEE Transactions on Aerospace and Electronic Systems,1987,AES-23(2):225-232.
[5] ABEL J S,CHAFFEE J W.Existence and Uniqueness of GPS Solutions[J].IEEE Transactions on Aerospace and Electronic Systems,1991,27(6):952-956.
[6] CHAFFEE J,ABEL J.On the Exact Solutions of Pseudorange Equations[J].IEEE Transactions on Aerospace and Electronic Systems,1994,30(4):1021-1030.
[7] LEVA J L.An Alternative Closed-form Solution to the GPS Pseudo-range Equations[J].IEEE Transactions on Aerospace and Electronic Systems,1996,32(4):1430-1439.
[8] KURAZUME R,HIROSE S,NAGATA S,et al.Study on Cooperative Positioning System(Basic Principle and Measurement Experiment)[C]//Proceedings of 1996IEEE International Conference on Robotics and Automation.Minneapolis,MN:IEEE,1996:1421-1426.
[9] PATWARI N,ASH J N,KYPEROUNTAS S,et al.Locating the Nodes:Cooperative Localization in Wireless Sensor Networks[J].Signal Processing Magazine,2005,22(4):54-69.
[10] MOURIKIS A I,ROUMELIOTIS S I.Performance Analysis of Multirobot Cooperative Localization[J].IEEE Transactions on Robotics,2006,22(4):666-681.
[11] PENNA F,CACERES M A,WYMEERSCH H.Cramér-Rao Bound for Hybrid GNSS-terrestrial Positioning[J].Communications Letters,2010,14(11):1005-1007.
[12] MENSING C,SAND S,DAMMANN A.GNSS Positioning in Critical Scenarios:Hybrid Data Fusion with Communications Signals[C]//Proceedings of 2009IEEE International Conference on Communications Workshops(ICC Workshops 2009).Dresden,Germany:IEEE,2009:1-6.
[13] TIAN Shi-wei,DAI Wei-heng,CHANG Jiang,et al.On the Agent Localizability of Hybrid GNSS-terrestrial Cooperative Positioning[C]//第四屆中國衛星導航學術年會論文集.武漢:Springer Berlin Heidelberg,2013:567-575.
[14] QUEBE S,CAMPBELL J,DE VILBISS S,et al.Cooperative GPS Navigation[C]//Proceedings of 2010IEEE/ION Position Location and Navigation Symposium(PLANS).Indian Wells,CA:IEEE,2010:834-837.
[15] GARELLO R,SAMSON J,SPIRITO M,et al.Peer-to-peer Cooperative Positioning[J].Inside GNSS,2012(July/August):56-65.
猜你喜歡
車主之友(2022年4期)2022-08-27 00:58:26
知音·下半月(2022年5期)2022-05-23 23:17:04
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年5期)2016-11-28 09:55:15
非公有制企業黨建(2016年1期)2016-07-19 13:02:51
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
衛星與網絡(2016年12期)2016-02-05 09:23:23
創業家(2015年10期)2015-02-27 07:55:08
創業家(2015年10期)2015-02-27 07:54:39
