載運貨車超載限制系統設計
2014-01-03 06:36:40吳銘哲蘇永茂鄭金城趙志華
電子測試 2014年2期
吳銘哲,蘇永茂,鄭金城,趙志華
(1.義烏市民用航空管理局,義烏,322000; 2.哈爾濱工業大學,威海,264209)
0 引言
受多種因素影響,國內汽車行業在運輸市場上的運輸能力小于運輸數量,導致多年來運輸價格不斷攀升,大部分從事運輸行業的車主們受經濟利益驅使,就從超載運輸中獲取暴利。據相關統計,超載貨車占貨車總量的50%左右,超載量基本在4~6.25 倍左右。
車輛超載嚴重擾亂了道路運輸市場,使得國家道路與橋梁的建設和維護更加困難,使道路周圍的環境受到了更多污染,嚴重威脅著人們的生活和財產安全。因此,筆者提出了一種基于車載稱重技術和CAN 總線通信技術的載運貨車超載限制系統。該系統不僅能對車輛的載荷進行準確的監測,還能夠實現車輛超載后無法正常啟動的功能,因此,對車輛超載的治理有著積極的意義。
1 總體設計方案
載運貨車超載限制系統主要由傳感器組、監控單元和限制執行單元構成,如圖1 所示。
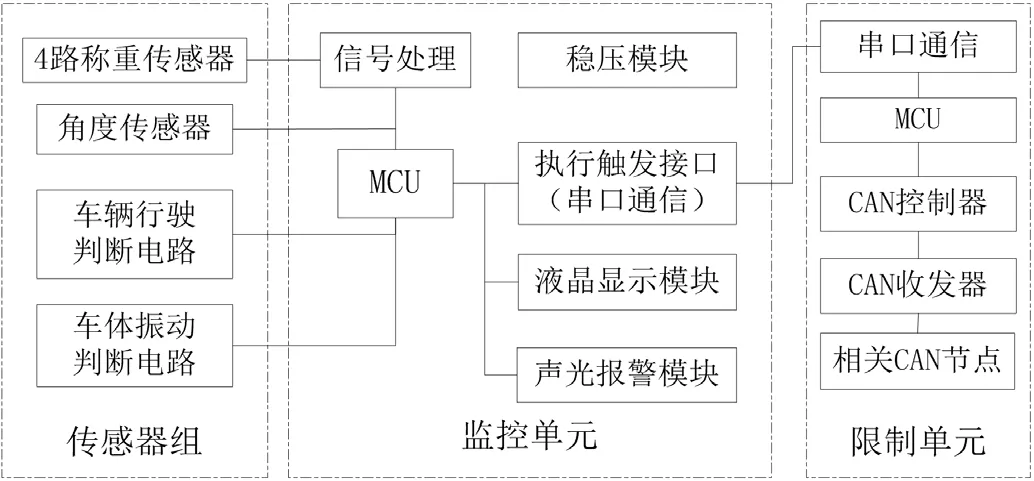
圖1 系統總體方案圖
2 超載限制系統硬件設計
2.1 主要傳感器的設計
(1)電阻應變傳感器設計

所以只要測得鋼板彈簧的應變即可間接得出鋼板彈簧的載荷信息。本文中電阻應變傳感器的應變片選用選擇金屬箔式應變片,測量電路采用全橋電路。
(2)車輛行駛判斷電路設計
車輛行駛過程中,超載限制系統對其控制,勢必會給行車安全帶來很大的影響,所以超載限制系統工作前必須判斷車輛是否行駛。
車輛行駛判斷電路的基本原理為霍爾效應。當車輛行駛時,車輛行駛判斷電路輸出TTL 高電平,單片機判斷車輛行駛中,超載監測與超載限制系統暫停工作,否則單片機判斷車輛未行駛,并進行數據的采集。
(3)車體振動判斷電路設計
停車狀態下,貨物裝載后啟動前也存在著微小振動,將會對測量結果產生影響,所以在貨物裝載后要進行振動檢測。
當車體有振動時,車體振動判斷電路輸出高電平給MCU,MCU 進行動態稱重,否則輸出低電平給MCU,MCU 進行靜態稱重。
2.2 超載監測模塊關鍵技術
(1)放大電路設計
稱重傳感器輸出的信號十分微弱,并且隨時有振動和噪聲的干擾,所以為了保證測量值的準確性,在稱重傳感器的信號通過A/D 轉換之前,必須對信號進行放大。稱重傳感器輸出的電壓為毫伏級別,為了保證測量精度,本文選用高精度儀表放大芯片AD620。
(2)數據的處理與顯示模塊設計
本文的MCU 選用的是宏晶公司生產的STC12C5A60S2 系列單片機,此單片機適用于強干擾場合。四個電阻應變傳感器與角度傳感器輸出的模擬電壓信號由STC12C5A60S2 的自帶A/D 轉化成數字信號后,經過MCU 計算得出車輛的總載荷與各軸的軸載。最后判斷車輛是否超載,并將結果顯示到液晶屏上。當車輛超載時,超載監測模塊啟動聲光報警,之后再啟動超載限制執行模塊限制超載車輛正常啟動。
2.3 超載限制執行模塊設計
超載監測模塊判斷車輛超載后,需要限制車輛啟動,這個執行動作由超載限制執行模塊來完成。超載限制執行模塊與車輛CAN 總線進行通信,控制燃油噴射的相應CAN 節點,通過控制供油電磁閥的開閉來限制車輛啟動
(1)CAN 控制器
本文選用Philips 公司生產的獨立型工程控制器SJA1000,此種獨立型控制器在工程使用中相對靈活,能夠與多種類型的微處理器、單片機的標準總線接口進行組合,非常適用于汽車環境,SJA1000 與MCU 的接口如圖2 所示。
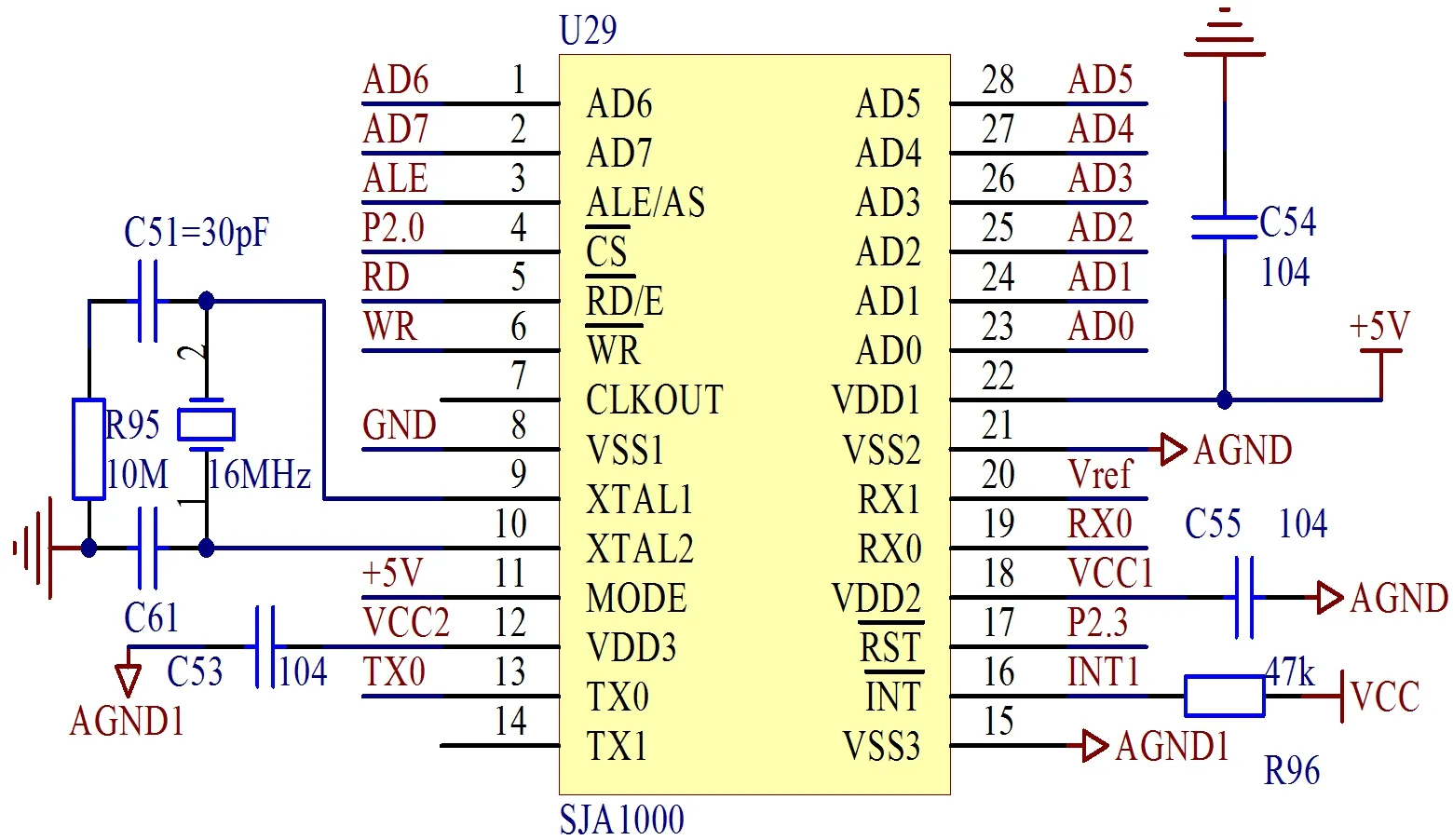
圖2 SJA1000 接口原理圖
SJA1000 的AD0~AD7 與STC89C52 單 片 機 的P0 口 連 接,作為數據和地址復用總線。WR、RD、ALE 分別與單片機對應腳相連。片選信號與單片機的P2.0 管腳相連,當管腳P2.0 為0 時,系統選中SJA1000,并可對其進行相關的操作。SJA1000的MODE 接+5V,選擇InTel 的工作模式為二分頻。INT 是SJA1000 控制器中斷信號的輸出端,與單片機的INT1 管腳相連接,處理器通過中斷的工作方式對SJA1000 的數據存儲區進行訪問。
(2)CAN 驅動器
本文選擇Philips 公司生產的PCA82C250 作為本模塊的CAN 驅動器。PCA82C250 與SJA1000 接口如圖3 所示,引腳1和4(TXD、RXD)分別與CAN 控制器SJA1000 的TXD 和RXD 管腳連接。其引腳8(RS)有3 種不同的工作方式供選擇:斜率控制、高速模式和待機模式。由于系統波特率較低,本電路采用斜率控制方式,在RS 引腳上接一個斜率控制電阻,電阻的阻值依據總線通信速度來調節,通常在16~200K 范圍內選擇,本電路選用電阻。

圖3 PCA82C250 接口原理圖
3 超載限制系統軟件設計
超載限制系統的軟件設計主要包括:傳感器數據的采集、傳感器數據的處理、數據的顯示以及與車輛CAN 總線進行通信以限制超載車輛啟動。
系統的整體程序流程圖如圖4 所示。
4 結語
目前車載稱重技術只是對車輛載荷與軸載進行檢測與顯示,或者利用無線通信設備將車輛超載信息發送給超載監督部門,但這沒有阻止超載車輛正常運行,對公路依然損害很大,達不到良好的超載防治效果。所以筆者提出設計了一種利用應變傳感器測量車輛鋼板彈簧的載荷信息,間接得出車輛載荷與各軸軸載,并判斷其超載情況,當車輛超載時,系統與車輛CAN總線進行通信限制超載車輛正常啟動的裝置。此系統從源頭上,降低了超載車輛的各種危害,對監測和治理車輛超載、保證運輸與行車安全、減少車輛超載對道路的損害具有十分重要的意義。
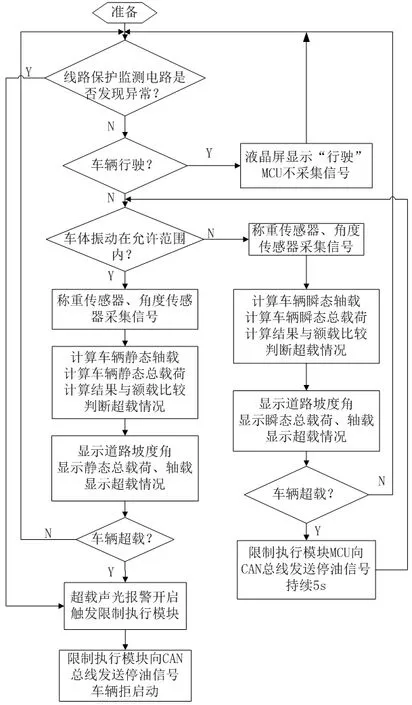
圖4 系統總體方案圖
[1] 杜娟,劉曉東.我國車輛超載現狀分析及對策研究[J]. 價值工程.2012,31(1): 279-280.
[2] Liu C R, Guo L,Li J,et al.Weigh-in-motion (WIM) sensor based on EM resonant measurements[C]//Antennas and Propagation Society International Symposium,2007 IEEE. IEEE, 2007: 561-564.
[3] 田晶晶, 李世武, 蘇建, 等. 基于位移傳感器的汽車超載動態監測預警系統[J]. 吉林大學學報: 工學版, 2012,42(006):1475-1480.
[4] Su Y,Singh G.Synchronization in CAN-based Embedded Systems[J].Embedded Systems and Applications.Las Vegas,Nevada,USA,2004.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
