利用一維距離像序列提取導(dǎo)彈目標(biāo)微動(dòng)特征
2014-01-01 03:19:10桑玉杰
現(xiàn)代雷達(dá) 2014年5期
王 洋,桑玉杰
(南京電子技術(shù)研究所, 南京210039)
0 引言
彈道導(dǎo)彈中段的真假?gòu)楊^識(shí)別,是彈道導(dǎo)彈防御系統(tǒng)中的關(guān)鍵問(wèn)題。彈頭目標(biāo)沿彈道飛行時(shí)自身一般處于進(jìn)動(dòng)狀態(tài),且由于定向打擊要求,通常錐旋軸會(huì)指向再入方向。彈頭由于具有姿態(tài)控制系統(tǒng),其飛行相對(duì)穩(wěn)定,有進(jìn)動(dòng)角及進(jìn)動(dòng)現(xiàn)象伴隨,但其進(jìn)動(dòng)角一般不大。彈體、誘餌、碎片等通常沒(méi)有姿態(tài)控制裝置,因此趨向翻滾或擺動(dòng)等微動(dòng)方式。不同微動(dòng)方式對(duì)目標(biāo)回波的調(diào)制不同,因此從回波起伏提取彈道目標(biāo)微動(dòng)特征成為中段識(shí)別的重要手段[1]。基于微動(dòng)特征識(shí)別真假?gòu)楊^的一個(gè)關(guān)鍵問(wèn)題是微多普勒的精確估計(jì),亦即目標(biāo)微動(dòng)周期的提取。
目標(biāo)周期微動(dòng)特性會(huì)對(duì)其雷達(dá)回波產(chǎn)生周期性調(diào)制。文獻(xiàn)[2]通過(guò)對(duì)窄帶回波進(jìn)行時(shí)頻分析得到微多普勒頻率隨時(shí)間的變化關(guān)系,這種方法要求對(duì)窄帶回波數(shù)據(jù)進(jìn)行有效的平動(dòng)補(bǔ)償,實(shí)現(xiàn)困難。文獻(xiàn)[3]和[4]利用進(jìn)動(dòng)錐體目標(biāo)的雷達(dá)散射截面(RCS)隨姿態(tài)角變化表現(xiàn)為隨時(shí)間變化,將RCS隨時(shí)間變化轉(zhuǎn)換為RCS姿態(tài)角序列,可估計(jì)進(jìn)動(dòng)參數(shù)。這種方法能夠估計(jì)包含微動(dòng)周期在內(nèi)的微動(dòng)參數(shù),但對(duì)非合作目標(biāo)難以應(yīng)用。利用一維距離像序列提取彈道目標(biāo)微動(dòng)參數(shù)的方法也得到了研究[5-6]。已有方法通常要先提取一維散射中心,然后估計(jì)目標(biāo)徑向投影尺寸變化。這類(lèi)方法要求散射中心比較穩(wěn)定,且能實(shí)現(xiàn)不同距離像的散射中心之間的關(guān)聯(lián)。對(duì)于目標(biāo)姿態(tài)變化引起等效散射中心發(fā)生變化,或遮擋等因素引起的散射中心數(shù)目不同,且難以正確關(guān)聯(lián)的情況,這類(lèi)方法難以得到正確結(jié)果。本文首先分析了進(jìn)動(dòng)、翻滾等微動(dòng)方式下目標(biāo)姿態(tài)角的變化規(guī)律,然后提出了基于一維距離像序列提取目標(biāo)微動(dòng)周期的方法。該方法不需要進(jìn)行運(yùn)動(dòng)補(bǔ)償?shù)忍幚恚砗?jiǎn)單,實(shí)現(xiàn)方便,在一定噪聲條件下也能正確提取微動(dòng)周期。
1 微動(dòng)目標(biāo)姿態(tài)角變化分析
理論計(jì)算和實(shí)驗(yàn)測(cè)量均表明,在高頻區(qū),目標(biāo)總的電磁散射可以認(rèn)為是某些局部位置上電磁散射的相干合成,這些局部性的散射源通常被稱(chēng)為等效散射中心,或簡(jiǎn)稱(chēng)散射中心[7]。目標(biāo)的高分辨一維距離像就是在照射時(shí)刻,目標(biāo)散射中心在雷達(dá)視線上的投影,可以利用極窄的脈沖,或者脈沖壓縮后的寬帶回波信號(hào)來(lái)獲得高分辨一維距離像,一維距離像隨目標(biāo)姿態(tài)的變化而變化。
目標(biāo)的進(jìn)動(dòng)、章動(dòng)、翻滾等微運(yùn)動(dòng)會(huì)造成目標(biāo)相對(duì)于雷達(dá)視線(RLOS)的姿態(tài)角發(fā)生變化,對(duì)應(yīng)各散射中心位置在雷達(dá)視線上的投影發(fā)生相應(yīng)變化。進(jìn)動(dòng)是由自旋和錐旋合成的微動(dòng)方式。文獻(xiàn)[4]推導(dǎo)了遠(yuǎn)場(chǎng)條件下,雷達(dá)入射方向近似與yoz平面平行時(shí),進(jìn)動(dòng)目標(biāo)在t時(shí)刻相對(duì)于雷達(dá)的姿態(tài)角β(鼻錐方向?yàn)?°)計(jì)算公式

式中:θ是進(jìn)動(dòng)角;γ是雷達(dá)視線與進(jìn)動(dòng)軸的夾角;ω是目標(biāo)繞進(jìn)動(dòng)軸的角速率,如圖1所示,圖中Ω是目標(biāo)的自旋頻率。對(duì)于彈頭這種表面光滑且軸對(duì)稱(chēng)的目標(biāo),可忽略自旋引起的目標(biāo)相對(duì)于雷達(dá)視線的姿態(tài)變化。從式(1)可以看出,當(dāng)短時(shí)間內(nèi)雷達(dá)視線與進(jìn)動(dòng)軸夾角變化較小時(shí),目標(biāo)相對(duì)于雷達(dá)的姿態(tài)角近似周期變化。假設(shè)目標(biāo)進(jìn)動(dòng)角θ為6°,錐旋頻率為1 Hz,雷達(dá)視線與進(jìn)動(dòng)軸夾角γ為139°,則姿態(tài)角β按圖2所示周期變化。姿態(tài)角的周期變化導(dǎo)致目標(biāo)一維距離像序列按相同周期變化,因此,可以根據(jù)一維距離像序列存在周期相關(guān)的特性估計(jì)目標(biāo)進(jìn)動(dòng)的錐旋周期。
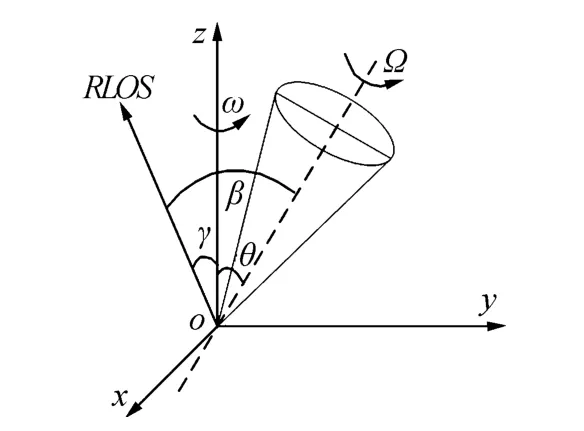
圖1 目標(biāo)進(jìn)動(dòng)示意圖
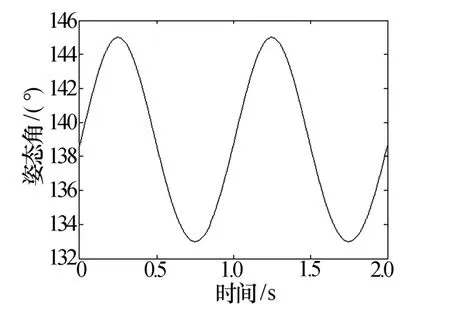
圖2 γ=139°時(shí)進(jìn)動(dòng)目標(biāo)相對(duì)于雷達(dá)視線的姿態(tài)角變化
如果目標(biāo)繞x軸做翻滾運(yùn)動(dòng),翻滾周期為5 s,同樣假定雷達(dá)視線平行于 yoz平面,且與 z軸夾角為139°,則目標(biāo)姿態(tài)角 β'按式(2)計(jì)算

10 s時(shí)間內(nèi)β'變化趨勢(shì)如圖3所示,姿態(tài)角按翻滾周期變化,同樣,可以根據(jù)一維距離像序列存在周期相關(guān)的特性估計(jì)翻滾周期。
2 微多普勒特征提取
由于一維距離像有隨姿態(tài)角變化而變化的特性,目標(biāo)在機(jī)動(dòng)、翻滾等周期微動(dòng)狀態(tài)下,其相對(duì)于雷達(dá)視線的姿態(tài)角呈近似周期變化,因此,雷達(dá)獲取的目標(biāo)距離像序列也具有相同的周期變化特性。對(duì)距離像序列求取某幀距離像與其他各幀距離像的相關(guān)系數(shù),并估計(jì)相關(guān)系數(shù)序列變化的周期,即可估計(jì)出目標(biāo)的微動(dòng)周期。
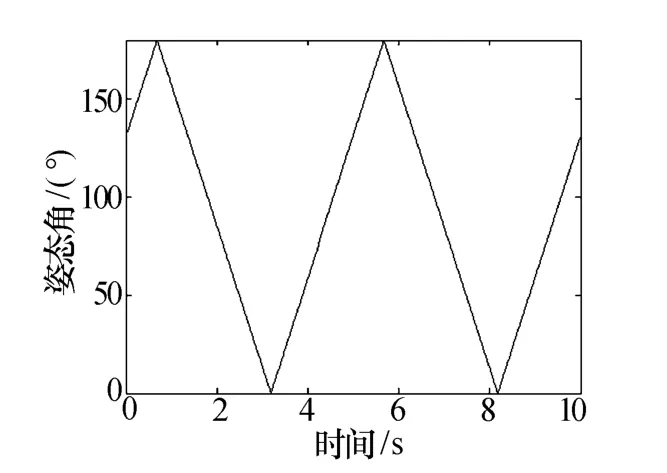
圖3 翻滾目標(biāo)相對(duì)于雷達(dá)視線的姿態(tài)角變化
雷達(dá)實(shí)際觀測(cè)的通常是非合作目標(biāo),不同時(shí)刻目標(biāo)的距離像在距離波門(mén)中的位置是不定的,因此,目標(biāo)距離像存在不可預(yù)測(cè)的相對(duì)平移[8]。為了克服一維距離像的平移問(wèn)題,需要采用滑動(dòng)相關(guān)方法計(jì)算兩幀距離像的最大滑動(dòng)相關(guān)系數(shù)作為二者之間的相似性度量。下面介紹最大滑動(dòng)相關(guān)系數(shù)的計(jì)算方法,設(shè)(n)為 第 i幀 原 始 距 離 像,n=0,1,2,…,N-1,N為距離單元數(shù),其歸一化距離像xi(n)定義為
則第i幀和第j幀距離像xi(n)和xj(n)的最大滑動(dòng)相關(guān)系數(shù)定義為
提取最大相關(guān)系數(shù)變化周期的方法采用自相關(guān)函數(shù)法。周期信號(hào)的自相關(guān)函數(shù)也具有周期性,并且周期與信號(hào)周期相同。在周期信號(hào)周期的整數(shù)倍上,它的自相關(guān)函數(shù)可以達(dá)到最大值。即可以不用考慮信號(hào)的起始時(shí)間,而從自相關(guān)函數(shù)的第一個(gè)最大值的位置來(lái)估計(jì)其周期,這個(gè)性質(zhì)使自相關(guān)函數(shù)成為估計(jì)各種信號(hào)周期的一個(gè)依據(jù)[9]。計(jì)算ρ(m)的自相關(guān)函數(shù)

根據(jù)圓周相關(guān)也稱(chēng)循環(huán)相關(guān)定理[10],式(4)和式(5)可由FFT計(jì)算實(shí)現(xiàn)。以計(jì)算最大滑動(dòng)相關(guān)函數(shù)為例,式(4)可由下式計(jì)算

式中:Xi(k)和Xj(k)分別是xi(n)和xj(n)的傅里葉變換,k=0,1,2,…,N-1。
3 仿真實(shí)驗(yàn)
基于散射點(diǎn)模型,仿真了X波段雷達(dá)帶寬1 GHz、重頻400 Hz條件下,錐體目標(biāo)進(jìn)行錐旋的寬帶回波數(shù)據(jù)。錐旋頻率為2 Hz,錐旋角度為6°。
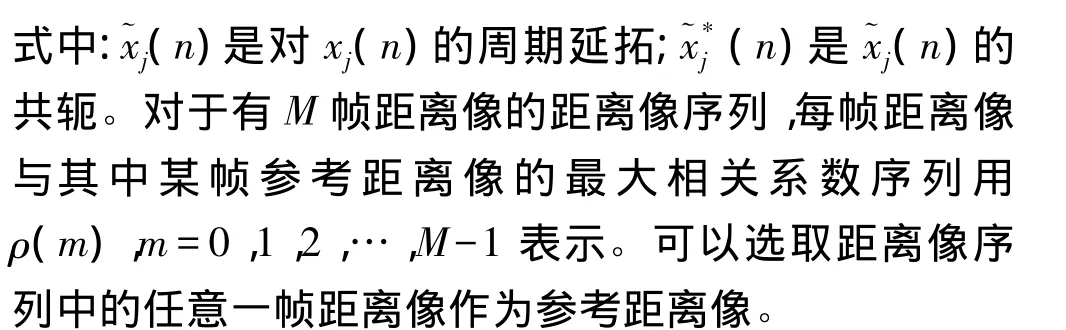
可任取錐旋目標(biāo)的一幀距離像,求其與連續(xù)2 s時(shí)間內(nèi)的其他各幀距離像的最大滑動(dòng)相關(guān)系數(shù),如圖4所示,可以明顯地看出一維像變化的周期性。計(jì)算圖4所示的最大相關(guān)系數(shù)序列的自相關(guān)函數(shù),如圖5所示,其第一個(gè)最大值位置為199,相當(dāng)于平移198點(diǎn)后的最大相關(guān)函數(shù)序列與原序列相關(guān)程度高。根據(jù)重頻400 Hz,可以估算出目標(biāo)錐旋周期為198/400=0.495 s,錐旋頻率為2.02 Hz。
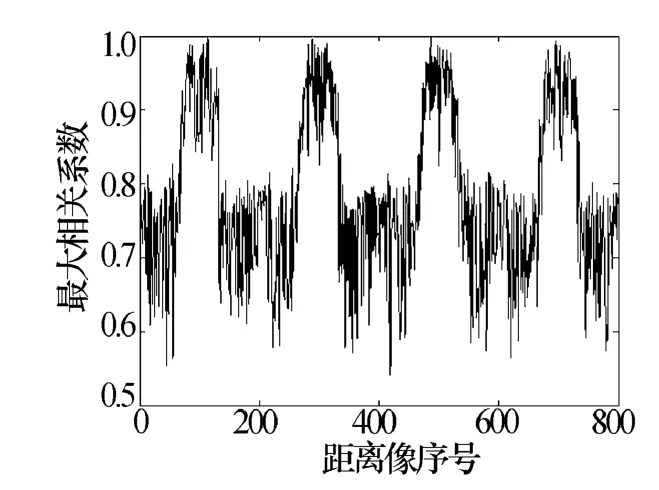
圖4 錐旋目標(biāo)連續(xù)2 s距離像與其中某幀距離像的最大相關(guān)系數(shù)
圖5 圖4所示最大相關(guān)系數(shù)序列的自相關(guān)函數(shù)
在寬帶I/Q回波數(shù)據(jù)上加入白高斯噪聲,得到信噪比約為20 dB的距離像序列。這里的信噪比按照文獻(xiàn)[11]中第二種寬帶信噪比定義,即取距離像峰值與噪聲均值的比值計(jì)算信噪比。對(duì)比加入噪聲前后的某幀距離像如圖6所示。對(duì)加入噪聲的距離像序列進(jìn)行同樣的分析,結(jié)果如圖7~圖8所示,微動(dòng)頻率約為1.99 Hz。可見(jiàn),在一定信噪比條件下,仍能夠正確提取出目標(biāo)錐旋的微多普勒頻率。

圖6 某幀距離像
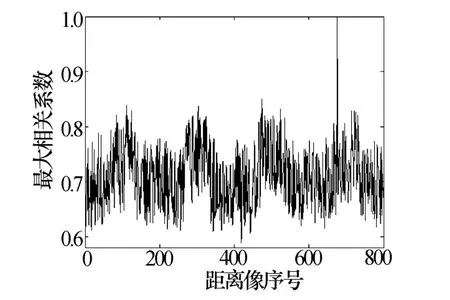
圖7 加入噪聲后距離像序列的最大相關(guān)系數(shù)
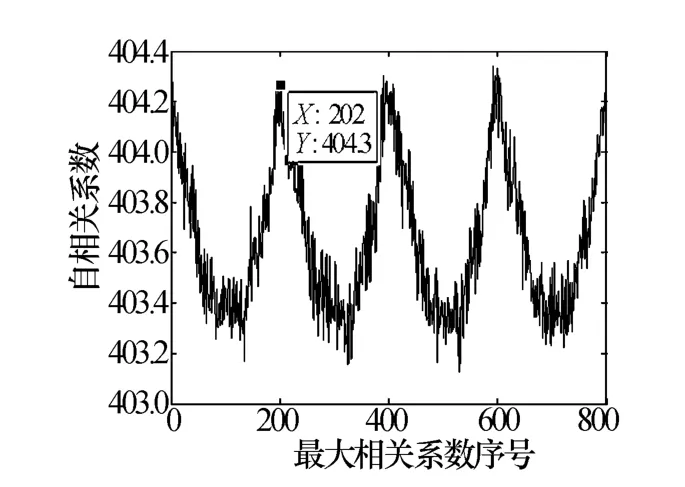
圖8 圖7所示最大相關(guān)系數(shù)序列的自相關(guān)函數(shù)
4 結(jié)束語(yǔ)
微動(dòng)特征是中段彈道導(dǎo)彈目標(biāo)識(shí)別的重要特征。文中分析了目標(biāo)錐旋、翻滾兩種典型微動(dòng)情況下,目標(biāo)相對(duì)于雷達(dá)視線的姿態(tài)角按微動(dòng)周期呈周期變化,與姿態(tài)角對(duì)應(yīng)的目標(biāo)一維距離像序列也按相同周期變化。本文提出通過(guò)計(jì)算距離像序列與其中某幀距離像之間最大滑動(dòng)相關(guān)系數(shù)的變化周期提取微動(dòng)周期特征的方法。仿真結(jié)果表明,這種方法在距離像序列觀測(cè)時(shí)間至少大于兩倍微動(dòng)周期的情況下,能得到正確的微動(dòng)周期估計(jì),在一定信噪比條件下也能得到較好的特征提取結(jié)果。
本文所提方法對(duì)于實(shí)測(cè)導(dǎo)彈類(lèi)目標(biāo)數(shù)據(jù)能否得到正確結(jié)果,需要有實(shí)測(cè)數(shù)據(jù)進(jìn)行驗(yàn)證,還需要了解實(shí)際觀測(cè)目標(biāo)的真實(shí)微動(dòng)特征,這通常是很難得到的目標(biāo)信息。此外,還需進(jìn)一步研究本文方法的適用條件,包括觀測(cè)時(shí)間、信噪比、姿態(tài)角等。例如,在某些姿態(tài)角范圍內(nèi),目標(biāo)距離像周期變化不明顯,算法性能會(huì)有所下降。
[1] 金 林.彈道導(dǎo)彈目標(biāo)識(shí)別技術(shù)[J].現(xiàn)代雷達(dá),2008,30(2):1-5.Jin Lin.Technique of target recognition for ballistic missile[J].Modern Radar,2008,30(2):1-5.
[2] 孫照強(qiáng),李寶柱,魯耀兵.彈道中段進(jìn)動(dòng)目標(biāo)的微多普勒研究[J]. 系統(tǒng)工程與電子技術(shù),2009,31(3):538-540,587.Sun Zhaoqiang,Li Baozhu,Lu Yaobing.Research on micro-Doppler of ballistic midcourse target with precession[J].Systems Engineering and Electronics,2009,31(3):538-540,587.
[3] 金文彬,劉永祥,任雙橋,等.錐體目標(biāo)空間進(jìn)動(dòng)特性分析及其參數(shù)提取[J]. 宇航學(xué)報(bào),2004,25(4):408-410,422.Jin Wenbin,Liu Yongxiang,Ren Shuangqiao,et al.Character analyzing of spatial precession for cone and its parameter extracting[J].Journal of Astronautics,2004,25(4):408-410,422.
[4] 陳行勇,黎 湘,郭桂蓉,等.微進(jìn)動(dòng)彈道導(dǎo)彈目標(biāo)雷達(dá)特征提取[J].電子與信息學(xué)報(bào),2006,28(4):643-646.Chen Hangyong,Li Xiang,Guo Guirong,et al.Radar feature extraction of micro-precession ballistic missile warhead[J].Journal of Electronics & Information Technology,2006,28(4):643-646.
[5] 朱玉鵬,王宏強(qiáng),黎 湘,等.基于一維距離像序列的空間彈道目標(biāo)微動(dòng)特征提取[J].宇航學(xué)報(bào),2009,30(3):1133-1140.Zhu Yupeng,Wang Hongqiang,Li Xiang,et al.Micro-motion feature extraction of spatial ballistic target based on HRRP dynamic sequence[J].Journal of Astronautics,2009,30(3):1133-1140.
[6] 賀思三,周劍雄,付 強(qiáng).利用一維距離像序列估計(jì)彈道中段目標(biāo)進(jìn)動(dòng)參數(shù)[J].信號(hào)處理,2009,25(6):925-929.He Sisan,Zhou Jianxiong,F(xiàn)u Qiang.Using HRRP sequence to estimate the precession parameters of midcourse target[J].Signal Processing,2009,25(6):925-929.
[7] 黃培康,殷紅成,許小劍.雷達(dá)目標(biāo)特性[M].北京:電子工業(yè)出版社,2005.Huang Peikang,Yin Hongcheng,Xu Xiaojian.Radar target characteristic[M].Beijing:Publishing House of Electronics Industry,2005.
[8] 馮德軍,陳志杰,王雪松,等.基于一維距離像的導(dǎo)彈目標(biāo)運(yùn)動(dòng)特征提取方法[J].國(guó)防科技大學(xué)學(xué)報(bào),2005,27(6):43-47.Feng Dejun,Chen Zhijie,Wang Xuesong,et al.A method for extracting moving feature of ballistic missile targets from high resolution range profiles[J].Journal of National University of Defense Technology,2005,27(6):43-47.
[9] 韓紀(jì)慶,張 磊,鄭鐵然.語(yǔ)音信號(hào)處理[M].北京:清華大學(xué)出版社,2004.Han Jiqing,Zhang Lei,Zheng Tieran.Speech signal processing[M].Beijing:Tsinghua University Press,2004.
[10] 王世一.數(shù)字信號(hào)處理[M].北京:北京理工大學(xué)出版社,1997.Wang Shiyi.Digital signal processing[M].Beijing:Beijing Institute of Technology Press,1997.
[11] 桑玉杰,王 洋,郭汝江.雷達(dá)寬帶與窄帶回波信噪比對(duì)比分析[J]. 現(xiàn)代雷達(dá),2013,35(10):27-31,35.Sang Yujie,Wang Yang,Guo Rujiang.Analysis of SNR differences between wideband and narrowband radar[J].Modern Radar,2013,35(10):27-31,35.
