基于MLD的物聯網感知層行為建模方法
2013-12-24 18:08:22
中國測試 2013年5期
關鍵詞:物聯網
?
基于MLD的物聯網感知層行為建模方法
許建龍,劉桂雄
(華南理工大學機械與汽車工程學院,廣東廣州510640)
摘要:針對物聯網感知終端多樣性、任務復雜等特點,采用混合邏輯動態(MLD)建模方法,推出物聯網感知層測控過程行為統一表達式。首先,把物聯網感知層測控過程行為用狀態變量、輸入變量和輔助變量來描述;其次,將物聯網感知層測控過程行為中操作約束、邏輯規則和連續動態特性集成為帶有混合整數不等式約束的狀態方程形式。通過此模型可在宏觀上把握系統過程行為,考慮系統操作約束、定性知識等因素,為測控系統協調優化奠定重要基礎。結合建立機動車運行安全監測系統模型的應用實例,結果表明建模方法的可行性、合理性、有效性。
關鍵詞:物聯網;感知層;混合邏輯動態;機動車運行安全監測
收到修改稿日期:2013-03-17
0 引言
物聯網感知終端多樣性、任務復雜性,一定程度上影響系統分析時模型的準確建立、輸入輸出關系的快速識別及實時性措施的正確制定,因此研究物聯網平臺感知層行為建模方法意義重大。考慮到基于混合邏輯動態(mixed logic dynamic,MLD)模型能將相互依賴物理規律、邏輯法則和操作約束共同描述系統,非常適合于物聯網感知層測控系統等兼具離散、連續動態特性系統建模。國內外大量學者開展將系統描述作為滿足MLD系統模型的數學形式的研究,如法國巴黎工程學院Gaid MEMB等研究網絡控制系統在帶寬受限下優化控制與調度問題,建立系統在帶寬受限連續事件、離散時間下的MLD模型,并用于汽車懸架系統調度[1];日本北海道大學Miao Du等研究多飛行器編隊飛行協同問題,建立基于MLD三維主從配置編隊飛行模型,保證飛行器能夠協調有序工作[2];意大利錫耶鈉大學Bemporad Alberto等對無線測控系統進行實驗研究,通過邏輯轉換建立系統MLD模型,得到系統輸入輸出變量邏輯表達式[3]。此外,MLD方法在工業過程控制、化工流程批處理控制等方面也得到廣泛應用[4-6]。可預見,它在物聯網感知層測控系統中也有廣闊前景。
本文將采用MLD建模方法,致力于構建一個統一物聯網感知層行為模型框架,并通過實例檢驗模型可行性。
1 基于MLD的物聯網感知層行為建模
圖1為感知層應用場景抽象分層結構圖。圖中物聯網感知層分為感知設備層、設備網絡層、設備協調層。其中感知設備層可抽象為感測組件、受控組件,感測組件包括傳感器、RFID、條形碼、智能檢測儀器儀表等,受控組件包括閥門開關、繼電器、某些按照邏輯關系工作環節等執行器設備,實現信號采集、處理、控制等功能;設備網絡層包括各種總線如CAN總線、RS-485總線等,或無線如WSN、藍牙、WiFi等,實現感知設備間、感知設備與物聯網網關(協調器)間的通信連接;設備協調層即物聯網網關,負責收集感測組件數據、控制受控組件執行某動作、協調各節點有序工作等,實現對感知設備的統一管理,通過實時調度,使感知層更實時、可靠。
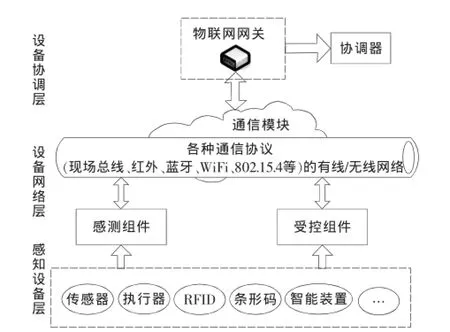
圖1 物聯網感知層應用場景抽象分層結構圖
1.1物聯網感知層行為MLD建模方法描述
圖2為物聯網感知層MLD建模方法圖。在分析物聯網感知層連續事件與離散事件基礎上,建立系統狀態空間數學模型,對應系統不同運行模態或者不同區域范圍,設置、定義不同輔助邏輯變量,對涉及約束建立命題邏輯并轉化為整數不等式,通過引入輔助變量將線性函數、邏輯變量之間乘積關系轉化為混合整數不等式形式,最后將系統連續、離散兩部分集成在一個統一框架下,把整個系統描述成混合邏輯動態模型形式。
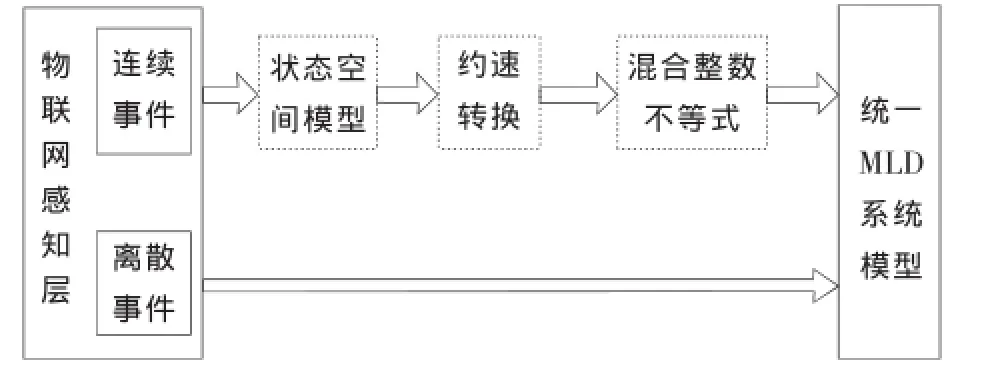
圖2 物聯網感知層MLD建模方法圖
感知層通過感測節點獲取測控對象信息,協調器節點根據測控信息制定調度決策策略,受控節點又根據協調器執行相應決策,連續與離散事件描述所表述物理意義表現在:(1)整體行為呈現出信息獲取、調度決策、決策執行3狀態循環更迭,即跳躍式離散狀態變遷(如圖3);(2)微觀上看,整體行為又間歇式地表現出連續性演化,二者交替演進,形成錯綜復雜的動態過程。下面采用MLD建模方法,對物聯網感知層整體測控行為進行描述,得出感知層行為MLD模型。
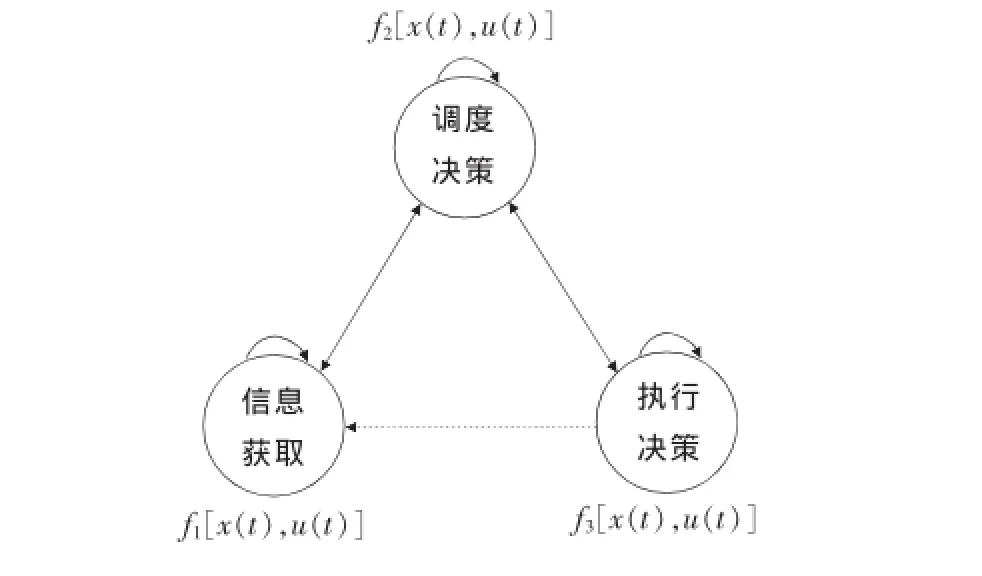
圖3 感知層測控過程狀態演變模型圖
1.2感知層測控行為統一MLD建模
1.2.1測控行為連續動態狀態空間機理模型建立
在圖2中,感知層測控行為過程涉及各種連續事件、離散事件及其混合事件,難以用一般的微分數學方程表示。如果把感知層中感測節點能量隨時間連續遞減等狀態事件作為連續事件,把感知層整體測控行為邏輯狀態轉移事件、感知層節點內部判斷決策事件、受控組件執行決策事件等作為離散事件,并假設感知層整體行為呈現出信息獲取、調度決策、執行決策3狀態循環的非線性更迭狀態,某時刻狀態為x(t),下一時刻狀態為x(t+1),導致感知層狀態變化輸入為u(t),信息獲取狀態為f(1x(t),u(t)),調度決策狀態為f(2x(t),u(t)),執行決策為f(3x(t),u(t)),某狀態下約束條件集合為Xi,3狀態約束集合為X={X1,X2,X3},感知層整個測控行為基于不同約束條件,在3狀態模型之間轉換,那么用分段函數形式表示的感知層測控行為過程數學模型為
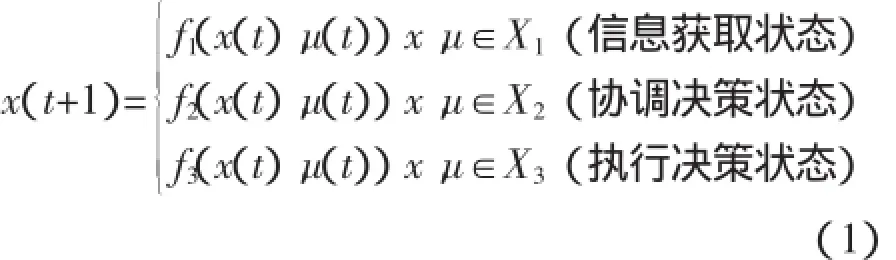
這是對感知層測控行為的宏觀描述,實際上每個狀態內還包含很多子過程行為,X子集Xi內部包含此狀態下不同子過程行為約束。
1.2.2測控行為過程約束命題轉換
令感知層每個狀態下約束條件集合X(ii=1,2,3)X中每個子集Xi,Xi滿足:
設每個子集Xi表示為x、u約束的互不相交的凸多面體[7],系統狀態x(t)與輸入u(t)空間凸多面體集約束集為Ti,多面體中x(t)約束的相關系數為Si,多面體中u(t)約束的相關系數為Ri,即:

對于狀態Xi,引入邏輯變量δi∈{0,1}i=1,2,3,系統處于狀態Xi時δi=1,由于每個邏輯變量對應的每一狀態不相交,故有:

那么,由式(3)和式(4),可推得:
[δi=1] →[Six(t)+Riu(t)≤Ti](5)
設Sij、Rij分別為多面體中x(t)約束相關系數Si和u(t)約束相關系數Ri的第j行,且每個狀態內部包含n個子約束,那么式(5)可寫為
由式(5)、式(6),結合MLD命題邏輯規則,可推得等價不等式:

這樣,就完成感知層狀態空間模型中約束命題的帶邏輯變量整數不等式表示。
1.2.3測控行為過程混合不等式生成
為了使感知層行為空間模型中的連續事件與邏輯事件,用一個統一表達式表示。基于前面已引入的邏輯變量δi(t),式(1)分段函數模型可表達成:

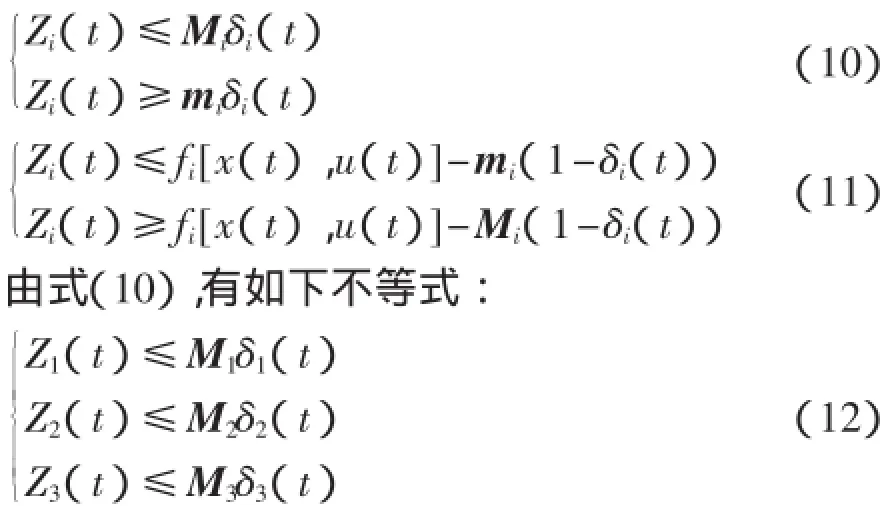
令Zi(t)=fi[x(t),u(t)] ,δi(t)作為輔助連續變量,則有:

若感知層每個狀態空間內部包含對應n個子約束的子狀態都有連續事件,則對應每個狀態子狀態可表示為
則利用MLD命題邏輯規則,可得Zi(t)=fi[x(t),u(t)] δi(t)的等價不等式為
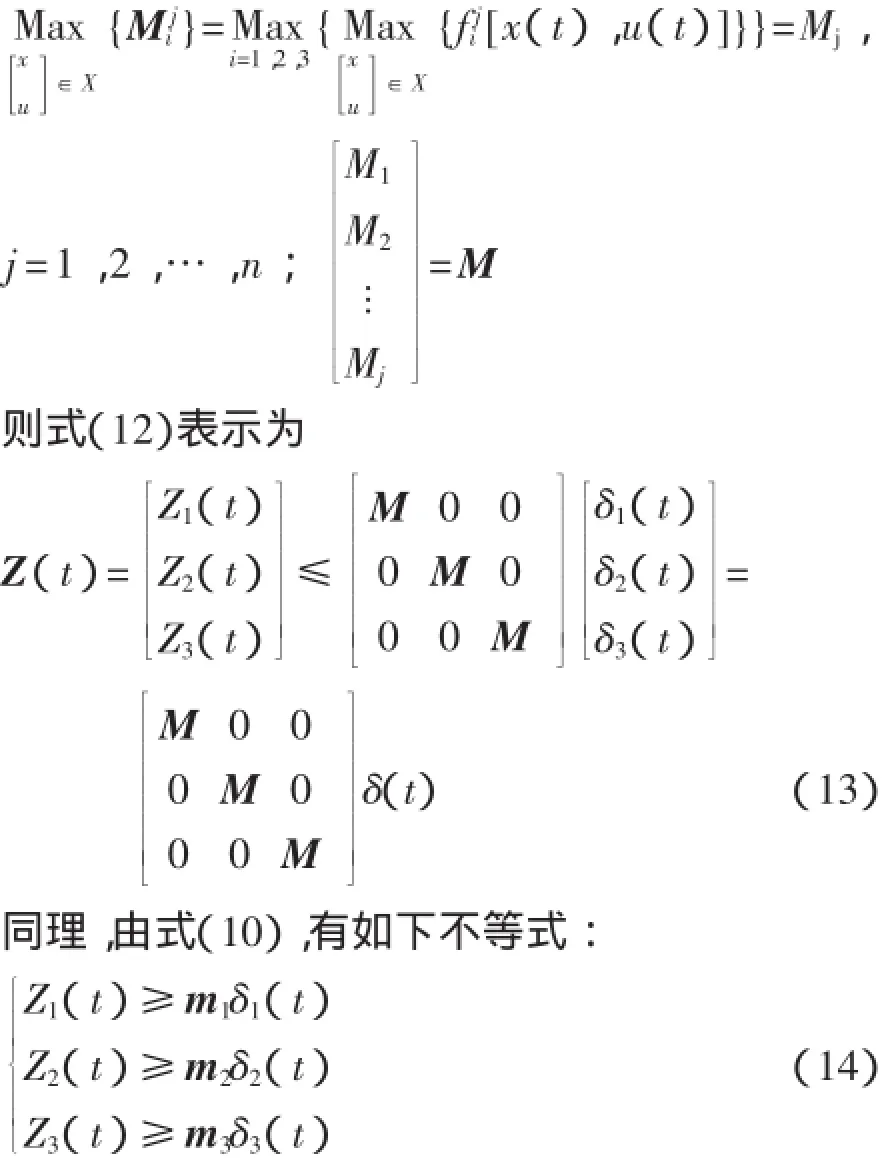
令需選取Mi矩陣中的最大值Mj及其組成的n行矩陣為M,即:
令需選取mi矩陣中的最小值為mj及其組成的n行矩陣為m,即:
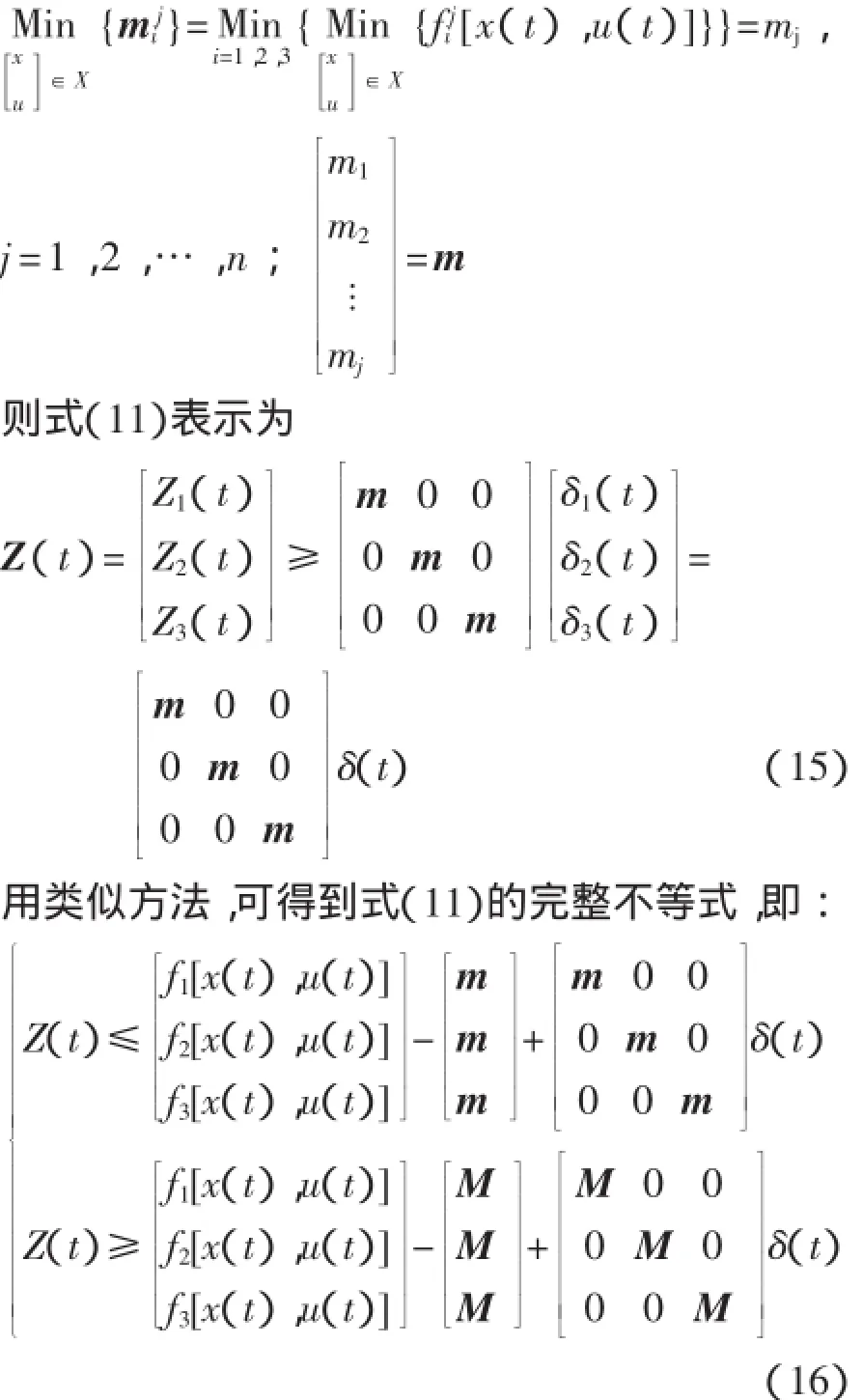
這樣,就完成感知層行為空間模型中分段函數與邏輯變量之間乘積關系的混合整數不等式形式表示。
1.2.4測控行為過程統一MLD模型表達式表示
若感知層測控行為過程空間模型中x(t)的整體系數矩陣為A,u(t)的整體系數矩陣為B,則綜合式(4)、式(7)、式(13)、式(15)、式(16),可得式(1)的MLD模型表達式,即感知層測控過程行為統一MLD模型表達式為
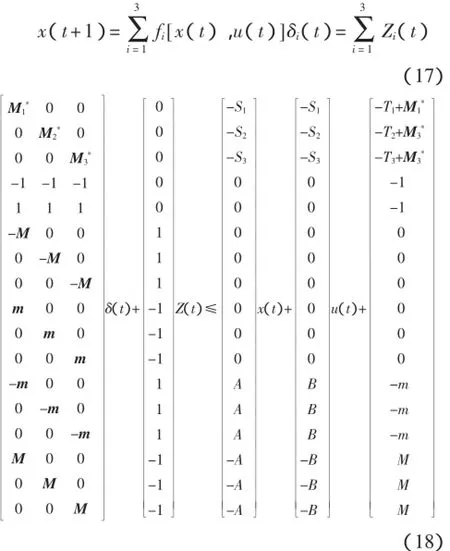
通過此模型表達式,把物聯網感知層測控過程行為的分段函數用包含狀態變量、輸入變量和輔助變量來描述,將物聯網感知層測控過程行為中操作約束、邏輯規則和連續動態特性集成為帶有混合整數不等式約束的狀態方程形式。在統一MLD模型框架下,可在宏觀上把握系統過程行為,考慮系統操作約束、定性知識等因素,為測控系統協調優化奠定重要基礎。
2 應用例
下面闡述基于MLD的物聯網感知層行為建模方法在機動車運行狀態監測(Vehicle operating safe state monitoring,VOSM)中的應用。機動車運行狀態監測利用安裝在車身、輪轂和懸掛的智能感測節點對與機動車運行安全直接相關的運動姿態參數(movement posture parameters,MAP)、動載荷參數(dynamic load parameters,DLP)、制動性能參數(braking performance parameters,BPP)機動車運動姿態、動載荷、制動參數、排放參數、位置參數等進行實時在線監測。圖4為VOSM系統基本結構示意圖[8-12],其中機動車MAP包括車身MAP和車輪MAP,機動車DLP包括車輪DLP和整車載荷、輪胎壓力和溫度,機動車BPP包括車輪滑移率、制動器制動力及平衡、整車制動力監測等,從圖中可看出它們在機動車上對應的位置。
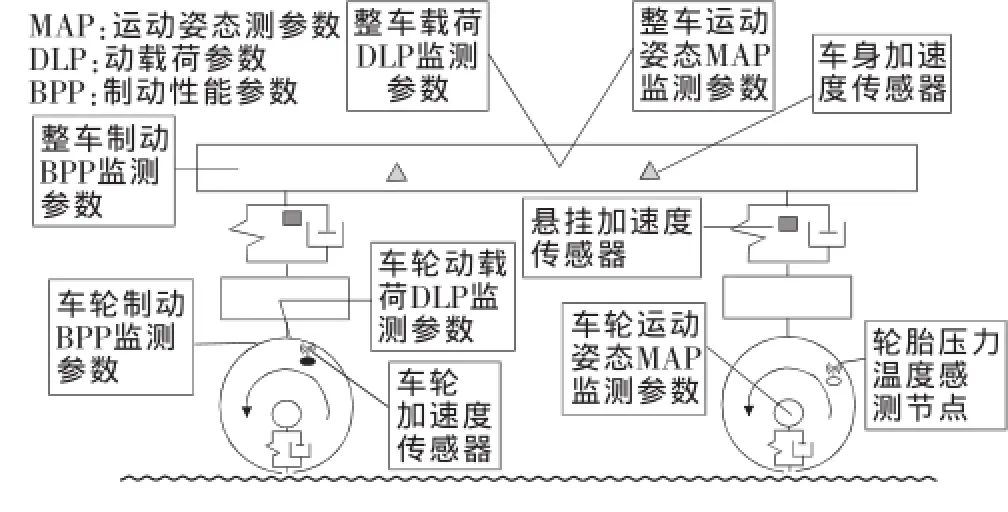
圖4 VOSM系統基本結構示意圖
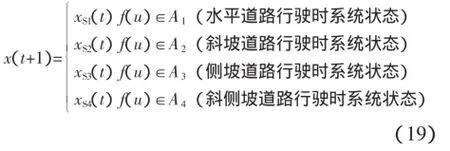
根據機動車運行過程中車身姿態角度(準B,θB,ψB)(側傾角、橫擺角、側偏角)各取值的不同,結合典型路況,將機動車運行狀態監測系統分為水平道路S1(0,0,Ψ)、斜坡道路S2(0,Θ,Ψ)、側坡道路S3(Φ,0,Ψ)和斜側坡道路S4(0,Θ,Ψ)4大類路況下的系統運行行為。設VOSM系統輸入為各傳感器數據uν(t),經過計算后的姿態角為f(u),水平道路下的角度約束為A1,斜坡道路下的角度約束為A2,側坡道路下的角度約束為A3,斜側坡道路下的角度約束為A4。水平道路上行駛時系統狀態為xS1(t),在斜坡道路行駛時系統狀態為xS2(t),側坡道路行駛時xS3(t),斜側坡道路行駛時系統狀態為xS4(t),那么系統行為過程數學模型可表示為
需要說明的是,不同路況下的約束A(ii=1,2,3,4)是包括多個子約束的集合,設Ai包含k個約束且第
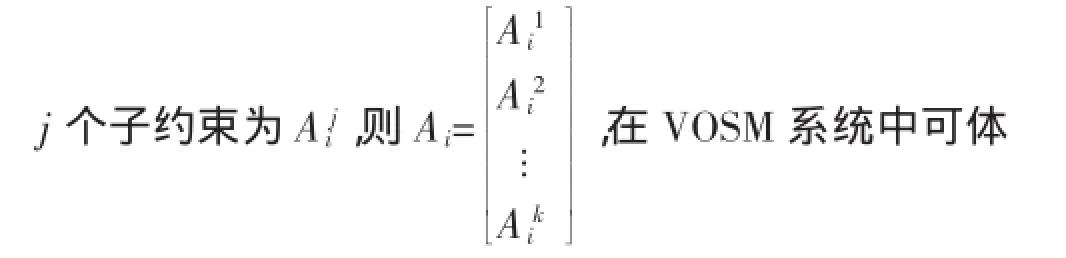
現為能耗約束、數據優先約束等。
對每一狀態,引入邏輯變量δV(it)∈{0,1},[δV(it)=1]令各約束最大值Max{Ai}=MV*,表示系統獲取的機動車各方向角度的最值,則根據MLD邏輯命題規則,得到:

式(19)可改寫為

4
引入連續輔助變量ZV(t)=xVi(t)δVi(t),令maxxSi(t)= MV,minxSi(t)=mV,那么利用MLD邏輯命題變換規則,ZV(t)滿足:
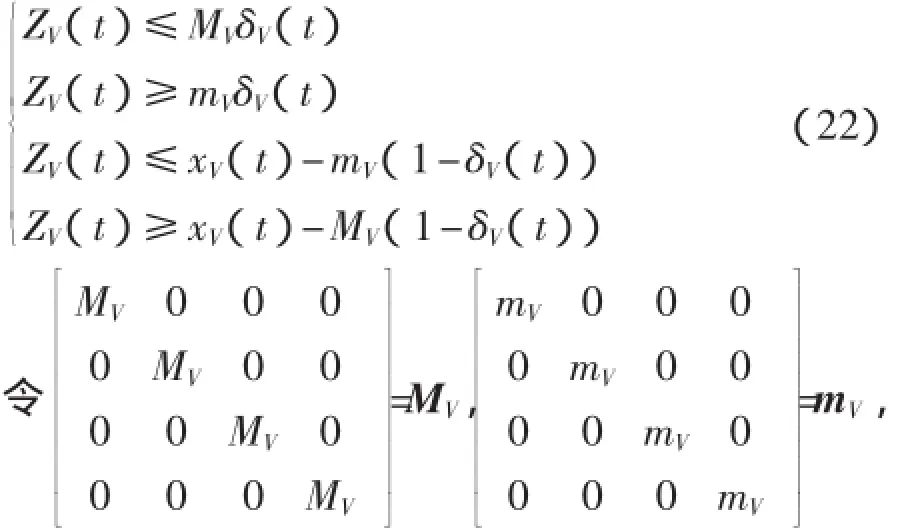
那么由式(22)得到系統行為等價MLD模型為由此,將VOSM系統機動車運行過程中的約束、狀態轉移變化用一個統一表達式表示,可將VOSM系統行為中操作約束、邏輯規則和連續動態特性集成帶有混合整數不等式約束狀態方程形式。
3 結束語
基于MLD建模方法,推出物聯網感知層測控過程行為表達式,把物聯網感知層測控過程行為用包含狀態變量、輸入變量和輔助變量來描述,將物聯網感知層測控過程行為中操作約束、邏輯規則和連續動態特性集成為帶有混合整數不等式約束的狀態方程形式,可在宏觀上把握系統過程行為,考慮系統操作約束、定性知識等因素,為測控系統協調優化奠定重要基礎。結合VOSM系統實際應用例,應用基于物聯網感知層MLD建模方法,得到VOSM系統在不同路況下的監測行為MLD模型,表明建模方法的可行性。
參考文獻
[1] Memb G,Cela A,Hamam Y. Optimal integrated control and scheduling of networked control systems with communication constraints:applicationto acar suspension system [J] . IEEE Transactions on Control Systems Technology,2006,14(4):776-787.
[2] Du M A,Yuh Y S. Optimal control of formation flight based on MLD systems[C] ∥IEEE International Conference on Control Applications,2007:904-909.
[3] Alberto B,Stefano D C,Erik H. Hybrid model predictive control based on wireless sensor feedback:An experimental study[J] . International Journal of Robust and Nonlinear Control,2010,20(2):209-225.
[4] Yin X H,Meng X L,Wang Z B,et al. MLD approach for modeling and predictive control of two-tank dynamic system over networks [C] ∥Proceedings of the 2010 International Conference on Electrical and Control Engineering,2010:5327-5332.
[5] Mohammad H,Hossein M. Hybrid predictive control of a DC -DC boost converter in both continuous and discontinuous current modes of operation [J] . Optimal Control Applications & Methods,2011,32(3):270-284.
[6] 王村,王宏剛.基于混合邏輯動態的列車運行調度模型[J] .工業控制計算機,2011,24(5):52-53,55.
[7] Bemporad A,Morari M. Control of systems integrating logic dynamics and constraints [J] . Automatic,1999(35):407-427.
[8] Xu J L,Liu G X,Gao Y. Vehicle operating safe state monitoring system modeling method based on automata[C] ∥Emerging Computation and Information Technologies for Education,2012:369-376.
[9] Pan M Y,Liu G X. Study on vehicle operating safe state monitoring parameter and measurement model[C] ∥2012 International Workshop on Information and Electronics Engineering,2012:2496-2500.
[10] 潘夢鷂,周岳斌,劉桂雄.機動車運行安全檢測模式及發展分析[J] .現代制造工程,2009(5):12-16.
[11] 劉桂雄,潘夢鷂,林創魯,等.一種基于輪載式智能傳感車輪運動姿態監測方法:中國,ZL 200910078476.6[P] . 2009-02-24.
[12] 劉桂雄,潘夢鷂,黃國健,等.一種基于輪載式智能傳感車輪制動性能監測方法:中國,ZL 200910077744.2[P] . 2009-02-16.
Internet of things perception behavior modeling method based on MLD
XU Jian-long,LIU Gui-xiong
(School of Mechanical and Automotive Engineering,South China University of Technology,Guangzhou 510640,China)
Abstract:According to the diversity and complexity of the internet of things(IoT)perception terminal,the mixed logical dynamic(MLD)modeling method was adopted in this paper and the unified expression for IoT perception layer measurement and control process behavior was derived. Firstly,the perception layer measurement and control process behavior was described by the state variables,input variables and auxiliary variables. Then,the operation constraint,logical rules and continuous dynamic characteristic can be integrated as a mixed integer inequality constraint state equation form. Through this model,it can be in the macro grasped the system process behavior. The system operation constraints,qualitative knowledge factors can be considered. So it lays an important foundation for the optimization of coordination of the measurement and control system. IoT perception layer behavior modeling method based on MLD is used to construct the vehicle operating safe state monitoring system model,and the result shows that the modeling method is feasible,reasonable and effective.
Key words:internet of things;perception layer;MLD;vehicle operating safe state monitoring
基金項目:粵港關鍵領域重點突破項目(2012A090200005);廣東省高等學校高層次人才項目(粵教師函[2010] 79號文)
收稿日期:2013-01-30;
doi:10.11857/j.issn.1674-5124.2013.05.030
文章編號:1674-5124(2013)05-0110-06
文獻標志碼:A
中圖分類號:TP391.45;TP391.9;TP212.2;U491.5
作者簡介:許建龍(1982-),男,廣東汕頭市人,博士,主要從事智能傳感與檢測技術研究。
猜你喜歡
軟件導刊(2016年9期)2016-11-07 21:56:29
軟件導刊(2016年9期)2016-11-07 21:32:45
中國科技博覽(2016年22期)2016-11-01 15:02:01
中國科技博覽(2016年22期)2016-11-01 13:21:09
中國科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識與技術(2016年21期)2016-10-18 22:33:02
科技視界(2016年22期)2016-10-18 17:23:30
中國新通信(2016年16期)2016-10-18 11:01:39
中國新通信(2016年16期)2016-10-18 11:00:54
科學與財富(2016年28期)2016-10-14 01:24:06
