大型變頻調速船用抓斗挖掘機的研制
2013-12-12 10:02:36謝勇謀吳大可肖奇斌宓祖田
船舶標準化工程師 2013年2期
曾 軍,吳 斌,謝勇謀,吳大可,肖奇斌,宓祖田
(杭州杭重工程機械有限公司,浙江杭州 310004)
0 引言
船用抓斗挖掘機(又稱為挖泥船)是水下開挖施工、水域工程外科手術式治理的主要設備。我國港口眾多、內河航道長,特別是近年來國內航道疏浚、水利建設、港口建設等基礎建設工程項目的廣泛展開,對船用抓斗挖掘機,特別是大斗容量機型的需求與性能要求都日益提高。
由于技術瓶頸的限制與國外產品的價格壁壘,目前國內市場上大斗容量的船用挖掘機大多是從國外購買的二手設備,售后服務無法得到保證。此外,《國務院關于加快振興裝備制造業的若干意見》中明確提出要提高重大技術裝備的自主化水平,國家的“十二五”規劃中更是將高端裝備制造也與海洋裝備制造業列為重中之重。因此,本項目立足與自主創新,在借鑒與引進國外先進技術的同時,依靠杭州杭重工程機械有限公司(以下簡稱“公司”)與浙江大學現有的技術力量,對船用抓斗挖掘機的國產化進程中所面臨的技術瓶頸進行技術攻關,依據“十二五”規劃中對高端裝備提出的高智能性、高可靠性與低能耗的指導原則,開發出符合我國具體施工工況的低成本、高性能船用抓斗挖掘機。
1 國內外情況
1.1 國內外研究現狀和發展趨勢
1)國內發展現狀
我國的船用抓斗挖掘機生產起步較晚,從1954年撫順挖掘機廠生產的第一臺斗容量為1 m3的機械式單斗挖掘機至今,大體上經歷了測繪仿制、自主研制開發和發展提高等三個階段。通過多年施工實踐的經驗積累,我國正逐步掌握疏浚施工關鍵技術和國產部分型號的船用挖掘機,這是我國疏浚業進一步發展的基礎。但是,國產船用挖掘機主要用于解決單一工程問題,大量工程屬于初期治理、大規模和基礎性建設,無法滿足逐漸專業化、多元化、系統化、綜合化的疏浚施工項目的要求。
目前市場上所擁有的大斗容量的船用挖掘機都是從國外進口的二手設備,且已使用多年,面臨大修、報廢,急待更新,同時由于缺少大修備件,二手設備購買使用性和性價比越來越低;此外,由于我國疏浚項目相對惡劣的施工環境所造成的與國外疏浚項目施工工況的顯著差異,造成了國外船用挖掘機產品并不能充分發揮其性能優勢。因此,市場急需國內的生產廠家來制造高性價比且適用于我國具體工況的大斗容量的船用挖掘機。公司通過長期的市場調研,探求到沿海港口和長江中下游聚集了眾多的船用挖掘機用戶,多數用戶主要需求的抓斗容量為6 m3及以上的船用抓斗挖掘機,并對產品的價格、維護成本、挖掘性能及售后服務提出了較高要求。
2)國外產品現狀與技術發展趨勢
國內進口的船用抓斗挖掘機產品主要集中在日本四國建機和石川島等企業,相對于國內產品采用電驅動形式,即傳動形式為電機驅動,由船提供電源,由交流電動機驅動直流發電機,國外產品技術上主要采用雙輸出軸柴油機驅動,?離合器,再到變矩器、鏈傳動、齒輪傳動再到主、副卷揚來實現抓斗提升下降,同時柴油機另一端驅動發電機,再帶動電動機實現機器平臺回轉、變幅等動作。目前,國外的產品正朝著高可靠性、高安全性、多工況適應性、高效節能與智能化方向發展。
2 市場需求分析
隨著世界經濟的發展,在全球物流持續增加、船舶日益大型化的趨勢下,港口的港池和航道必須不斷加深,同時港口數量也日益增加。
有關專家預測,未來十年間我國在沿海港口、航道建設與維護方面,沿海疏浚市場每年約有100~200億元投資,主要包括大型樞紐港深水航道的建設和維護、用于建港和臨江工業區建設的沿海大型陸域吹填項目以及港口航道的改造升級。
另外,中國疏浚治理具有較長的歷史,但手段落后且規模較小,造成先前水利清淤疏浚欠債較多,進而致使河道和入海口淤塞嚴重,水患頻繁,航道和港深相對于國際標準偏低,水庫面積和庫容萎縮普遍。數據顯示,2002年前我國各大主要江河年清淤疏浚量為1.81億立方米,2003~2010年年清淤疏浚量為2.71億立方米,而目前國內船用挖掘機總的年清淤疏浚能力僅有約1億立方米。目前,我國大量的清淤疏浚工作已提上議事日程,該工作已不僅在防洪建設中發揮著重要作用,同時對改善水環境、提高供水質量、美化城市和觀光旅游等方面也有著重要作用。未來中國環保疏浚市場無疑將呈現高速增長態勢,其市場潛力不可估量。基于上述情況預測,世界范圍內的疏浚量將不斷上升,對疏浚船舶特別是大容量的船用挖掘機的需求將不斷增加。
3 項目主要研究開發內容、技術關鍵
3.1 項目主要研究內容
船用挖掘機的性能主要由工作裝置、控制系統決定。其技術難點在于泥漿濃度、挖深、輸泥距離等參數的確定、工作裝置的切削性能和耐磨性以及綜合監控能力。結合國內外船用挖掘機的發展趨勢以及我國疏浚項目的具體工況要求,本項目研究的主要內容包括:
1)動力匹配與性能優化設計;
2)虛擬樣機建模與動態特性仿真技術;
3)挖掘軌跡控制及綜合監控研究。
3.2 項目關鍵技術
3.2.1 挖掘機動力匹配與性能優化設計
抓斗式挖泥船的型式較多,但其工作原理相同。本項目研究的挖泥船挖泥系統的特點主要有:
1)挖掘土質適應性強。可以配備各種不同類型的抓斗,如輕、中、重型抓斗,甚至可以配備超重型抓斗來適應不同土質的需要。在各種挖掘船中,抓斗式挖泥船適挖的土質的范圍是最廣的。
2)挖深適應性強。可以通過更換不同長度的抓斗鋼絲繩來滿足施工中不同挖掘深度的需要,最大挖深可達80 m。
3)抓斗機配起重吊鉤或配碎石重錘,可兼作起重船或作水下巖石預處理的鑿巖船使用,使船用挖掘機成為多用途工程船。
4)可作業于其它類型挖泥船不適應作業的水域。如狹小水域、港池、碼頭、大型廠礦企業專用航道、岸邊以及防波堤等區域的施工。
因此,船用抓斗挖掘機是一種多功能的工程裝備,所遇到的作業對象,即體質變化較大;此外,使用方式與要求也不同,有時強調能源經濟性,而在狹小水域或港口工況下,則重視精度和安全。同時,根據不同的挖掘土質,所配備的抓斗型號也有所不同,在不同的水深情況下,抓斗鋼絲繩的長度同樣不同。因此,一般的在滿足系統正常工作的前提下,應根據作用工況、抓斗結構參數和使用要求來對電源與電氣傳動進行優化設計,合理選擇船用挖掘機系統各元件的參數,使之與工況向適應,工作時能夠達到最佳的工作狀態,以提高系統局部和整體效率,達到節能效果。
3.2.2 虛擬樣機建模與動態特性仿真技術
船用抓斗挖掘機的傳統的經驗設計——物理樣機——現場試驗——樣機修改的迭代設計過程由于其設計周期長、效率低且無法分析工作過程中的動力學特性而無法滿足市場需求。此外,船用抓斗挖掘機是一個由動力裝置、傳動系統、轉向系統、氣動系統、工作裝置、制動系統等多個子系統組成的剛體——柔性體耦合的機、電、氣復雜系統,其各部件、總成以及施工工況決定了其整機性能,采用傳統的力學分析方法很難甚至無法對其三維運動學和動力學進行求解(圖1、圖2所示)。因此需要將多體系統動力學理論與虛擬樣機理論引入船用抓斗挖掘機的設計中來,解決其設計過程中關鍵的理論問題,建立起運動學、動力學與系統動態特性的數學模型。通過建立不同物理參數設計方案的虛擬樣機模型,確定影響性能的敏感參數,并通過可視化技術,預測產品在真實工況下的特征與動態響應,以獲得具有最優工作性能的設計方案,大大縮短產品的設計開發周期,提高產品的可靠性和性能指標。
3.2.3 挖掘軌跡控制及綜合監控研究
抓斗式挖泥船軌跡控制的目標是使挖泥船的施工精度和質量得到明顯的提高,通過對作業土體參數的在線識別,采用人工智能等技術手段,實現自動作業,降低操作者的勞動強度,提高工作效率。本項目研究抓斗式挖泥船抓斗施工作業流程以及挖泥船液壓控制系統的工作原理,根據實際施工作業要求,對挖掘軌跡控制及其綜合監控系統的硬件整體結構進行設計,并對系統中各個監控環節的工作原理以及系統各傳感器件間的數據傳輸及通信方式進行研究。
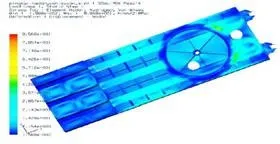
圖2 平臺整體位移云圖
3.3 技術路線
3.3.1 三變頻電機聯合驅動的動力匹配技術
解決途徑:船用抓斗挖掘機主要由回轉支承、回轉平臺、動臂與變幅、抓斗提升與回轉驅動裝置、電氣傳動與控制系統、氣動系統等組成。挖掘機的機械驅動分別由三臺變頻電機驅動,提升電機為一臺400 kW的變頻電機,由它來實現抓斗的開閉和升降。平臺的回轉由一臺90kW的電機驅動,動臂的變幅由一臺30 kW的電機驅動。
異步電機變頻調速原理:異步電機的同步轉速是由供給電機的電源頻率決定,如8極電機50Hz時750轉/分,10 Hz時為120轉/分,80 Hz時為1200轉/分,因此只要改變變頻器輸出頻率就能對電機進行調速,變頻調速異步電機輸出機械特性如圖3。
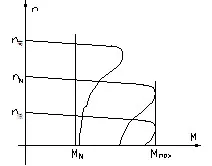
圖3 變頻調速異步電機輸出機械特性圖
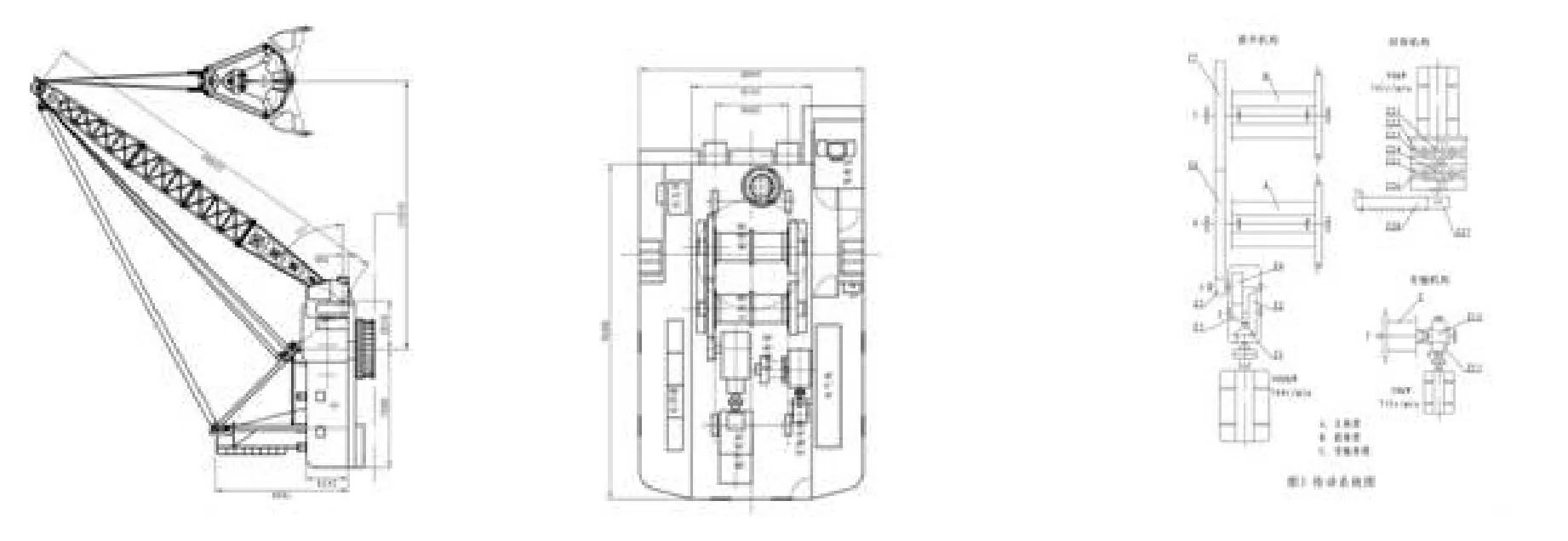
圖4 平臺整體布局圖
由于變頻調速通過內部計算機實現矢量控制,在50Hz以下實現恒轉矩調速,調速性能能與直流電機相媲美,50Hz以上實現恒功率調速。恒功率調速主要用于快速下放,由于快速下放一般為空斗或輕負載時下放,因此變頻調速也能滿足工況要求,為了實現較硬的機械器組成閉環控制。
控制包括氣路控制系統和電氣控制系統,抓斗的挖掘、升降,平臺回轉及動臂變幅的調速通過先進的變頻調速系統實現,該變頻調速系統在電機軸上安裝編碼器以組成閉環控制系統,最終實現了機械裝置的快速響應和高精度速度控制。回轉支承采用三派柱式回轉支承,特點是軸向及徑向間隙小,受載更加穩定,承載能力更強,安裝方便等特點;整機回轉制動采用電氣控制,提升卷筒采用大直徑,并且是單出繩,減少鋼繩彎曲度與損耗,增加鋼繩壽命;提升鋼繩采用雙出繩,增加提升穩定性;配重部分采用配重沙,減少生產成本。方案設計圖見圖4。
3.3.2 剛柔耦合的多體動力學建模技術
解決途徑:本項目通過Pro/E、ANSYS、ADAMS的聯合仿真平臺(圖5)對船用抓斗挖掘機的抓斗作業過程的機構運動學、動力學以及振動響應特性等進行分析。抓斗機動作由起升、回轉和變幅三大動力系統組成。項目通過建立船用抓斗挖掘機抓斗的運動學和動力學模型,并利用聯合仿真平臺得到仿真結果;利用Pro/E建立船用抓斗挖掘機的三維實體模型,應用大型有限元分析軟件ANSYS完成吊索以及彈性動臂的固有模態分析,通過ANSYS與ADAMS的專用接口生成模態中性文件并導入ADAMS,實現工作裝置剛體——柔性體耦合建模。同時為滿足運動控制研究的需要,對挖泥船抓斗進行水平直線、斜線、垂直線及弧線的運動規劃,并給出相關的仿真結果。
項目同時進行了船用抓斗挖掘機疏浚作業過程的建模與仿真的研究,研究在不同的疏浚環境和作業方式下吸口處泥漿的形成過程和計算泥漿比重的仿真模型,根據水力疏浚原理和6立方挖泥船的技術數據,設計泥泵和管路的清水特性曲線與泥漿特性曲線,在此基礎上給出了泥泵工作點的計算方法。以提高挖泥船作業的工作效率。
3.3.3 挖掘軌跡控制以及綜合監控系統的開發
解決途徑:通過疏浚作業的要求建立抓斗挖掘剖面坐標系統數學模型,選取合適的抓斗挖掘軌跡控制方案,實現抓斗的挖掘軌跡的監測與控制。使抓斗按照預定的挖槽剖面進行施工,顯著提高挖泥船的挖掘精度。
在實現挖泥船抓斗挖掘軌跡控制及原有挖泥船作業過程監控系統的基礎上,開發抓斗式挖泥船綜合監控系統。利用面向對象程序設計方法,合理劃分系統軟件各功能模塊,創建施工水深及坐標數據庫,采用數據庫訪問技術作為數據庫與用戶界面圖形系統的接口,實現施工水深查詢。
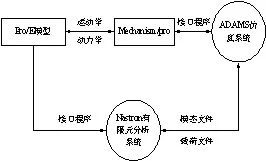
圖5 虛擬樣機平臺
5 結論
綜上分析,采用變頻調速提高了系統的可維護性和可靠性。同時改變原來的變流機組由異步電機、直流發電機組成,效率在0.8以下,而變頻器效率在0.95以上,從而起到了節能的效果。
[1]于凌宇.世界超級電容器發展動態[J].今日電子,2008(12):53-55.
[2]孟麗因.超級電容器組及能量管理系統[J].遼寧工學院學報, 2005,25(2):71-74.
[3]李曉娜.超級電容器在變電站直流系統中的應用[J].寧夏電力, 2008(5):16-19.
[4]王雪迪, 楊中平.超級電容在城市軌道交通中改善電網電壓的研究[J].電氣傳動, 2009,39(3):77-80.
[5]李貴遠, 陳勇.動力電池與超級電容混合驅動系統設計與仿真[J].系統仿真學報, 2007, 19(1):101-105.
[6]南金瑞, 王建群, 孫逢春.電動汽車能量管理系統的研究[J].北理工學報, 2005,5(5):384-389.
[7]張燕濱.變頻調速460問[M].北京: 機械工業出版社.2006.
[8]韓國收獲電氣株式會社.SOHO-VD變頻器用戶手冊[EB/OL](2009-07-09).
[9]GB/T3811-2008, 起重機設計規范[S].
[10]王棟.基于PC的虛擬樣機集成仿真平臺及其關鍵技術的研究[D].上海大學, 2007.
[11]侯紅玲, 趙永強, 魏偉鋒.基于ADAMS和ANSYS的動力學仿真分析[J].現代機械, 2005.
[12]夏鴻建.機械系統虛擬樣機平臺建模技術與動力學求解研究[D].華中科技大學, 2008.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年9期)2021-07-16 07:11:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國房地產業(2016年2期)2016-03-01 01:25:48
