404 Not Found
404 Not Found
噴水推進(jìn)器進(jìn)水流道空化和流動分離的模擬控制研究
康希宗,王紹增
(中國人民解放軍91208 部隊,山東 青島266102)
0 引言
船舶噴水推進(jìn)器主要由噴水推進(jìn)泵、進(jìn)水流道、噴口和轉(zhuǎn)向倒車機(jī)構(gòu)等部件組成。進(jìn)水流道是噴水推進(jìn)器的一個重要部件,其功能除了輸送水流外還將船底來流的能量傳遞給裝在尾板上的噴水推進(jìn)泵。在進(jìn)水流道里,來流能量的利用率直接影響著整個噴水推進(jìn)器的效率[1]。對于幾何結(jié)構(gòu)一定的進(jìn)水流道,弄清何時發(fā)生空化、何時發(fā)生流動分離將對我們充分利用來流的能量從而提高推進(jìn)效率起著至關(guān)重要的作用。本文針對國外某型進(jìn)水流道,運(yùn)用計算流體力學(xué)方法,通過大量數(shù)值實(shí)驗?zāi)M了不同進(jìn)速比和不同航速情況下的流動性能,繪制了該型流道正常工作的工況性能圖譜,得到了空化區(qū)、流動分離區(qū)與正常工作區(qū)的分界線,這對避免流道產(chǎn)生空化和流動分離具有重要的參考價值。
1 數(shù)值模擬的建立
1.1 初始條件的確定
當(dāng)艦船以某一航速穩(wěn)定航行時,噴水推進(jìn)器進(jìn)水流道內(nèi)的流場分布是確定的,通過計算流體力學(xué)的方法可以把該流場的分布情況精確模擬出來。但數(shù)值模擬時只知道進(jìn)口速度而不知道出口速度是無法求解的,所以首先要確定流道出口的速度分布。由于流道出口速度分布較為復(fù)雜且不容易用數(shù)學(xué)表達(dá)式描述,因此本文選用流量代替出口的速度分布作為已知條件來進(jìn)行數(shù)值模擬,即數(shù)值模擬的初始條件選用航速和流道出口處的流量。
1.2 進(jìn)速比IVR
進(jìn)速比IVR 的定義為進(jìn)水流道出口速度的平均值與航速的比值,它與流量之間的聯(lián)系如公式(1)所示。在航速一定的條件下,由于進(jìn)速比IVR 與流量成正比,因此可以用對進(jìn)速比IVR 的控制實(shí)現(xiàn)對流道出口流量的控制,以實(shí)現(xiàn)不同工況時的數(shù)值模擬。

式中:Vout表示流道出口處的平均速度;Vs表示船的航速;Q 表示流量;D 表示流道出口直徑;d 表示葉輪軸直徑。
1.3 流動性能的評價
航速和進(jìn)速比確定之后,進(jìn)水流道的流場分布就確定了。為了研究空化和流動分離兩種現(xiàn)象的發(fā)生、發(fā)展和消失的過程,本文在對流場分布進(jìn)行分析時,主要考察空化和流動分離兩個性能指標(biāo),最后補(bǔ)充考察了流道出口的不均勻性,以確定最佳工況點(diǎn)。
空化是指液體內(nèi)局部壓力降低時,液體內(nèi)部或液固交界面上蒸汽或氣體的空穴 (空泡)的形成、發(fā)展和潰滅的過程。空化會引起噴水推進(jìn)器流動損失增加,推力下降,振動和噪聲加劇等一系列負(fù)面影響。
流動分離又稱為邊界層分離,是指原來緊貼壁面流動的邊界層脫離壁面的現(xiàn)象[2]。設(shè)計不佳的進(jìn)水流道內(nèi)會產(chǎn)生嚴(yán)重的流動分離,使流動損失增大,效率降低,嚴(yán)重影響流動性能。
流道出口的出流速度分布越不均勻,就越容易增加噴水推進(jìn)泵的周期性脈動。這不僅會造成泵的耗功增大,效率下降,而且會引起振動加劇,噪聲增強(qiáng),抗空化性能下降。流道出口流場流動不均勻度ξ 的定義式[3]為

式中:Q 為流道出口的流量;Vx為出口的軸向速度;為出口的平均軸向速度。不均勻度ξ 越小,表示流道出流越均勻,流動性能越好。
2 數(shù)值模擬的計算
2.1 幾何建模與網(wǎng)格劃分
本文的模型選取了MJP 公司的葉輪直徑為750 mm的某型進(jìn)水流道(見圖1)。計算域按文獻(xiàn)[4]推薦取長、寬、深分別為30D,10D,8D。為保證計算精度,網(wǎng)格劃分采用六面體結(jié)構(gòu)化網(wǎng)格,近壁面采用O型網(wǎng)格并進(jìn)行了加密,網(wǎng)格數(shù)為94 萬,y +控制在200以內(nèi)。在流動變化劇烈區(qū)域,如唇部、彎管和流道與船底相交處進(jìn)行了網(wǎng)格加密,第一層網(wǎng)格距壁面0.1 mm (見圖2)。

圖1 流道計算域的幾何建模

圖2 網(wǎng)格劃分
2.2 控制方程與數(shù)值求解
進(jìn)水流道的流場是復(fù)雜的粘性不可壓湍流流動,它的速度、動量等都是低尺度、高頻的波動量[5]。本文采用目前工程上應(yīng)用最為成熟和廣泛的雷諾時均方法進(jìn)行數(shù)值計算,把湍流運(yùn)動看作時間平均流動和瞬時脈動流動的疊加[6]。將基本的N-S 方程引入Boussinesq 假設(shè)得到的流動控制方程組為

計算域上游設(shè)為速度進(jìn)口,速度大小及梯度分布受航速及邊界層的影響。根據(jù)R. Svenssen 和L. Grossi對噴水推進(jìn)船實(shí)船的測量結(jié)果[7],邊界層厚度δ 可采用Wieghardt 公式近似求取δ =0.27x (Re)-1/6,其中x 為距船首的距離,Re 為雷諾數(shù)。速度分布采用平板邊界層速度分布表示[8]為

式中:V 為邊界層內(nèi)流速;δ 為船底邊界層厚度;y 為距船底的距離;指數(shù)n 取為9。流道出口設(shè)為流量出口,進(jìn)水流道及船體設(shè)為無滑移壁面。
3 計算結(jié)果及分析
3.1 進(jìn)速比IVR 對流動性能的影響
表1 為MJP750 流道在額定航速為36 節(jié)、不同IVR時流動性能的計算結(jié)果。由表1 可得,在航速為36 節(jié)時,此型流道的正常工作范圍對應(yīng)的IVR 為(0.62,0.78),即流量應(yīng)大于5073 kg/s,小于6382 kg/s。當(dāng)IVR 大于0.78 時,流體的動能較大,在彎頭轉(zhuǎn)彎處形成低壓區(qū),壓力低于汽化壓力發(fā)生空化,此位置接近泵的進(jìn)口,會對泵的進(jìn)流產(chǎn)生嚴(yán)重影響,甚至?xí)鸨皿w的振動,大大降低噴水推進(jìn)器的效率,在工作中應(yīng)當(dāng)嚴(yán)格避免此類工況的發(fā)生。當(dāng)IVR 小于0.62 時,由于流體動能較小,動能不足以使流體到達(dá)彎頭的頂部,因此背部產(chǎn)生流動分離;同時隨著流量的降低,唇部下方的速度越來越大,產(chǎn)生低壓區(qū)從而產(chǎn)生空化,此時的空化不會進(jìn)入流道內(nèi)部,因此對整個流動性能的影響不大。當(dāng)IVR 介于0.62 和0.78 之間時,不會產(chǎn)生空化和流動分離,且不均勻度隨流量的增大而減小。因此在流道設(shè)計時,應(yīng)當(dāng)把額定工況選在流量為5800 kg/s 左右。由于上述計算沒有考慮軸的影響,如果把軸的影響加進(jìn)去,該流量應(yīng)該再減小。實(shí)際上,該型流道的設(shè)計流量為5700 kg/s,這也說明了流道設(shè)計時應(yīng)當(dāng)充分考慮流量的影響,即進(jìn)速比IVR 的影響。

表1 36 節(jié)不同IVR 時流動性能比較
以上的計算結(jié)果還說明,對于幾何形狀一定的進(jìn)水流道,在某一航速下,有一個正常工作范圍,對應(yīng)于IVR 或流量的一個取值范圍,如果我們把各個航速下的正常工作的IVR 或流量范圍求出,即可得到該型流道的工況性能圖譜。為此,我們需要研究航速對流動性能的影響。
3.2 航速對流動性能的影響
為分析不同航速下進(jìn)水流道流動性能的變化,在36 節(jié)額定航速的基礎(chǔ)上又增加了五個不同的航速(9節(jié)、18 節(jié)、27 節(jié)、45 節(jié)、54 節(jié))的數(shù)值模擬,涵蓋了當(dāng)今船舶常用航速范圍。各航速下的數(shù)值計算結(jié)果分別列表2 ~6。

表2 9 節(jié)不同IVR 時流動性能比較

表3 18 節(jié)不同IVR 時流動性能比較
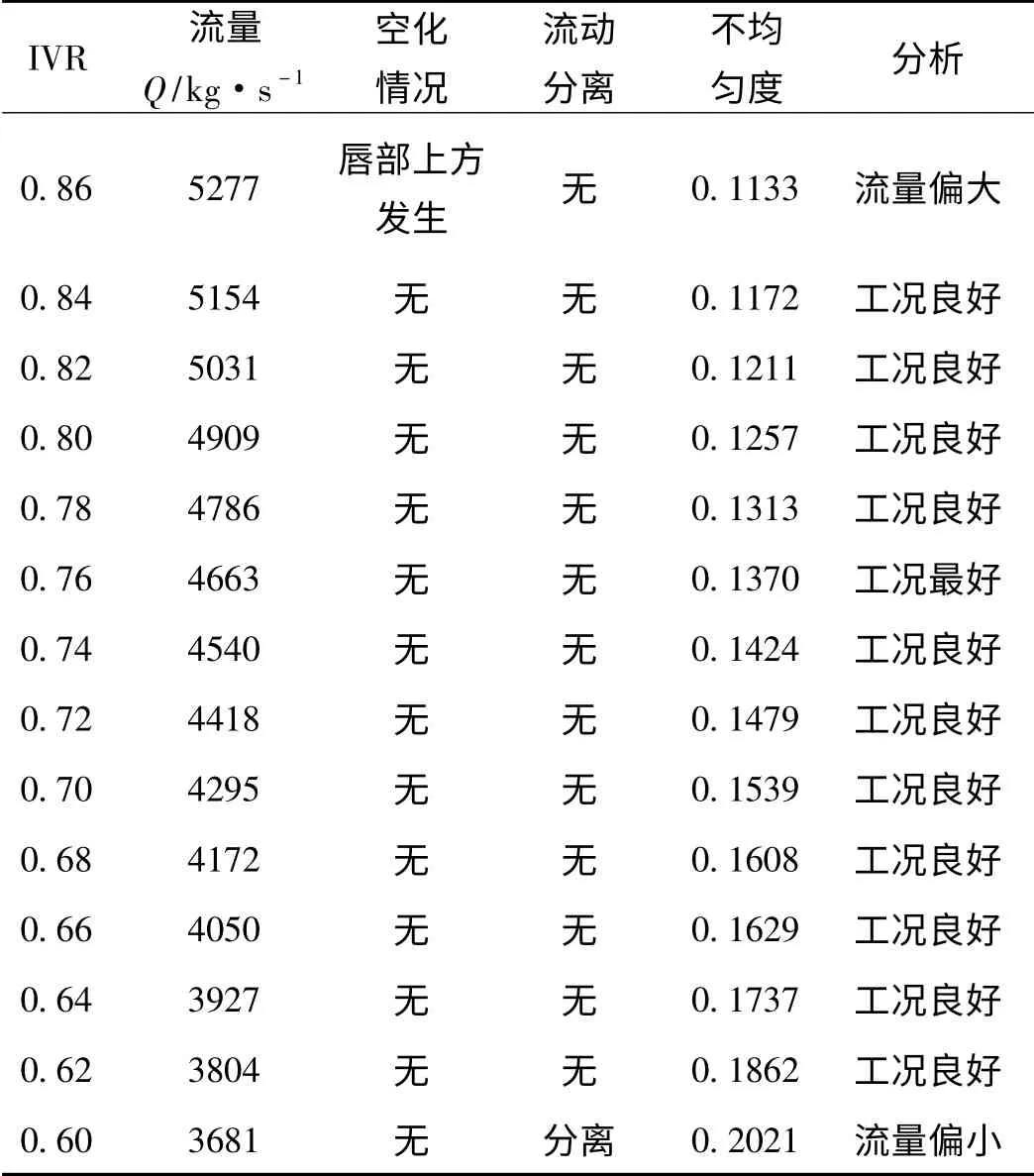
表4 27 節(jié)不同IVR 時流動性能比較

表5 45 節(jié)不同IVR 時流動性能比較
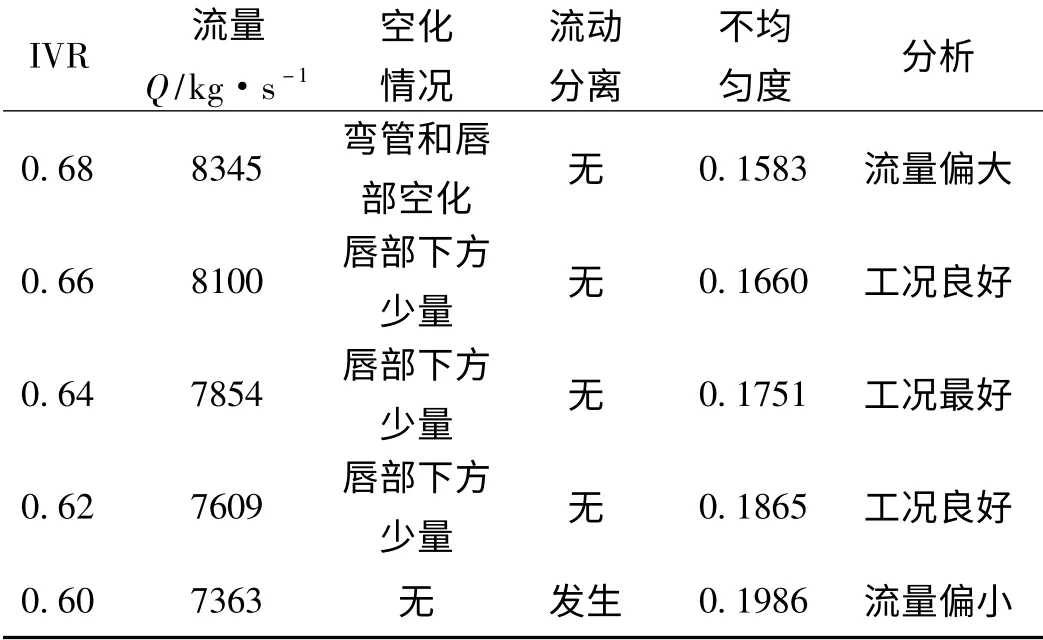
表6 54 節(jié)不同IVR 時流動性能比較
以上計算結(jié)果表明,該型流道在9 節(jié)時最佳工作范圍為IVR 取(0.62,1.02),在此范圍內(nèi)流道均不會發(fā)生空化和流動分離,且不均勻度隨IVR 的增大而減小。若以盡量遠(yuǎn)離空化和流動分離發(fā)生工況且不均勻度盡量小為最佳流動性能的判斷原則,可以得到該航速下一個最佳IVR 的值,即9 節(jié)時最佳IVR 為0.88。同理,18 節(jié)、27 節(jié)、36 節(jié)、45 節(jié)、54 節(jié)時正常工作的IVR 范圍分別為(0.62,0.92), (0.62,0.84),(0.62,0.78),(0.62,0.72),(0.62,0.66),最佳IVR 分別0.84,0.76,0.68,0.66,0.64。將上述結(jié)果作圖得到圖3。

圖3 IVR 與航速的關(guān)系
從圖3 中可以看出:隨著航速的增加,能正常工作的最小IVR 一直保持不變,均在0.62;最大IVR 逐漸減小,因此正常工作范圍也逐漸減小,當(dāng)增大到54節(jié)時,正常工作范圍已經(jīng)變得相當(dāng)狹窄,這對流道流動性能是相當(dāng)不利的。最佳IVR 隨航速的逐漸增大而不斷減小,因此高航速時把IVR 控制在合理范圍內(nèi)是決定流道設(shè)計好壞的關(guān)鍵一環(huán)。同理,分析各個IVR所對應(yīng)的流量隨航速的變化關(guān)系可以得到圖4。

圖4 流量與航速的關(guān)系
從圖4 中可以看出:正常工作時的流量隨航速的增大而增大,每個航速所對應(yīng)的流量范圍均比較狹窄,約為1000 kg/s,因此流量對流道流動性能的影響作用很大,要想設(shè)計出各個工況下性能均優(yōu)的流道,就要嚴(yán)格控制各個航速下通過流道的流量。
綜合以上結(jié)果可得:
1)對于幾何結(jié)構(gòu)一定的一型進(jìn)水流道,其工況性能圖譜可以分成三個區(qū):空化區(qū),在最大IVR 線(或最大流量線)以上,流道在本區(qū)內(nèi)工作時會產(chǎn)生空化;正常工作區(qū),在最大和最小IVR 線(或最大和最小流量線)之間,流道在本區(qū)工作時工況正常;分離區(qū),在最小IVR 線(或最小流量線)以下,流道在本區(qū)工作時產(chǎn)生分離。
2)由于IVR 隨航速的變化關(guān)系曲線近似直線,因此可以用某一高航速(如54 節(jié))和某一低航速(如9節(jié))的值來估計整個正常工作區(qū)的范圍。
4 小結(jié)
本文對某型進(jìn)水流道在不同進(jìn)速比IVR (流量)、不同航速的情況下進(jìn)行了數(shù)值模擬,分析了進(jìn)速比IVR(流量)、航速對進(jìn)水流道流動性能的影響,得出以下結(jié)論:
1)對于幾何結(jié)構(gòu)一定的進(jìn)水流道,其正常工作范圍受航速和IVR (流量)共同影響。當(dāng)航速一定時,只有IVR (流量)在某一特定范圍流道才能正常工作。
2)根據(jù)不同航速下正常工作的IVR (流量),可以作出該型流道正常工作的工況性能圖譜,得到空化區(qū)、流動分離區(qū)與正常工作區(qū)的分界線,這對控制進(jìn)水流道的工作狀態(tài)十分有利。
3)根據(jù)IVR 隨航速的變化曲線,可以用兩個航速預(yù)估流道的整個正常工作范圍。
4)正確運(yùn)用流道工況性能圖譜可以方便地控制流道始終處于正常工作狀態(tài):低航速對應(yīng)較小流量,高航速對應(yīng)較大流量;航速一定時,產(chǎn)生空化后需減小流量,產(chǎn)生流動分離后需增大流量。
[1]Allison J L. Marine waterjet propulsion [J]. SNAME Transactions,1993,101 :275 -335.
[2]丁祖榮. 流體力學(xué)(中冊) [M]. 北京:高等教育出版社,2003:136 -139.
[3]Norbert Willem Herman Bulten. Numerical analysis of a waterjet propulsion system [D]. Eindhoven:Eindhoven University,2006.
[4]劉承江,王永生,張志宏. 噴水推進(jìn)器數(shù)值模擬所需流場控制體的研究[J]. 水動力學(xué)研究與進(jìn)展,2008,23 (5):592 -595.
[5]湯蘇林,毛筱菲. 噴水推進(jìn)器進(jìn)水管內(nèi)流場模擬[J]. 武漢理工大學(xué)學(xué)報(交通科學(xué)與工程版),2004,28 (6):851 -854.
[6]常書平,王永生,龐之洋,等. 噴水推進(jìn)器進(jìn)水流道內(nèi)流場數(shù)值模擬與分析[J]. 武漢理工大學(xué)學(xué)報(交通科學(xué)與工程版),2010,34 (1):47 -51.
[7]Svensson R,Grossi L. Trial result including wake measurements from the world’s largest waterjet installation[C] // Proceedings of international conference on waterjet propulsion II. Amsterdam:RINA,1998.
[8]張拯,王立祥. 關(guān)于噴水推進(jìn)裝置平進(jìn)口邊界層影響系數(shù)估算的探討[J]. 船舶,2008 (3):10 -14.
