基于蒙特-卡洛法的彈道修正目標測量精度優化研究*
2013-12-10 06:39:54楊慧娟曲喜強王佳偉
彈箭與制導學報 2013年4期
關鍵詞:測量
楊慧娟,曲喜強,黃 錚,王佳偉
(1中北大學儀器科學與動態測試教育部重點實驗室,太原030051;2中北大學信息與通信工程學院,太原 030051;3西安機電信息研究所,西安 710065)
0 引言
反輻射末修子彈是利用敵方武器設備的電磁輻射來發現、跟蹤輻射源,并在外彈道末段利用沖推器產生的脈沖推力將彈丸導向目標的彈藥[1]。根據反輻射末修子彈技術的基本原理,其核心技術可以分為兩個部分:1)輻射源探測器對輻射源進行實時探測,并為彈載計算機提供彈丸的角偏差參數——偏角和方位角;2)利用探測器測量的角偏差相關信息,通過彈載計算機的彈道適時解算判斷是否發出修正指令,從而利用沖推器來修正彈道偏差達到較高的命中精度。國內外對此方面也進行了大量的研究工作,使用各種優化方法進行了彈道參數的優化設計,如Tekinalp,Vincent,Subchan 和 Hodgson[2-3]等人對多種類型的末修子彈彈道參數進行了優化設計;國內的相關學者在彈道參數優化方面也做了大量工作[4]。文中以多脈沖修正子彈末修段為研究對象,采用蒙特卡洛法對彈丸角偏差參數——偏角和方位角進行優化。
1 目標測量模型
根據反輻射末修子彈的工作原理可知,輻射源探測器檢測出的彈丸與目標輻射源的角偏差信息是彈載計算機最重要的輸入信息,將它們分別定義為偏角和方位角。首先定義彈軸坐標系OXYZ:原點O位于彈丸質心,縱軸OX在飛行器的對稱面內,指向彈丸頭部;法向軸OY位于對稱面內且垂直于OX軸;橫軸OZ符合右手法則。假設認為彈丸在飛行過程中的縱軸追隨速度軸的變化是瞬時完成的,即在該彈道模型中彈軸坐標系與彈道坐標系完全重合。偏角ε和方位角φ定義如圖1所示。偏角ε是指彈丸質心與目標連線OT與彈體縱軸OX之間的夾角,是末修子彈在彈道末段需要修正的物理量;方位角φ是指OT在OYZ平面內的投影與OY軸之間的夾角,用于判斷沖推器推力矢量與彈目位置矢量的方位關系;此外,OT與OX組成的平面稱為修正面。

圖1 彈道系內測量圖
設在標準地面坐標系中彈目連線矢量表示為:

其中:XT= [xTyTzT]T為目標位置,XO= [xOyOzO]T為彈丸質心位置。則彈目連線矢量bk在彈道坐標系上的投影為:

其中AT是標準地面坐標系到彈軸坐標系的轉換矩陣。
由圖1可知,偏角 ε和方位角 φ的計算模型為[5]:

2 優化問題分析
在反輻射末修子彈末段彈道階段需要由輻射源探測器測量的物理量有:偏角、方位角和轉速,然而由于硬件誤差或是客觀條件限制不可避免地會產生目標測量誤差,假設這些物理量的測量誤差服從零均值正態分布,即:


根據概率論可知[6],如果一種事件X的大量隨機抽樣服從零均值正態分布,即:X~N(0,σ2),那么:

當探測器測量誤差取到 ±3σ時,就形成了一個置信度為99.73% 的置信區間(-3σ,+3σ),這就意味著包含了測量誤差絕大部分的可能性,因此稱3σ為探測器測量極限誤差。
反輻射末修子彈的系統精度并不是由修正門限或是偏角測量誤差單一因素影響的,而是由二者耦合影響的一個復雜問題,這就需要綜合考慮兩個因素對末修精度的影響,從而得到最優參數指標。
根據反輻射末修子彈的工作原理可知子彈在彈道末段被拋撒出倉,為了便于研究,以子彈被拋撒出倉時的位置作為研究的初始狀態,如表1所示。

表1 子彈的參數初值

表2 無控彈道仿真結果
如表1所示,定義此時子彈的射程X和橫偏Z為0m,彈丸初始高度為母彈開倉高度Y=600m,在標準大氣模型下,仿真結果如表2所示。
3 目標測量精度優化
3.1 偏角測量精度優化
引入測量誤差后偏角修正門限ε0不再是唯一影響精度的系統指標,ε0與σε偏角測量誤差的選取是相互聯系的。同樣,偏角修正門限 ε0的選取對系統CEP的影響與其偏角測量誤差σε密切相關,如圖2所示。
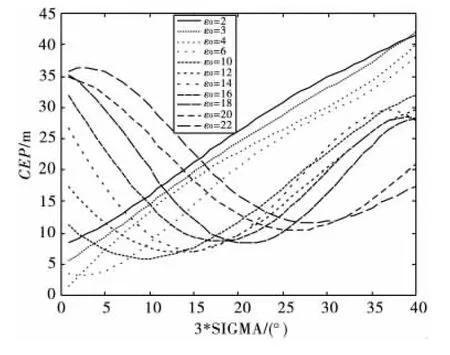
圖2 偏角修正門限與偏角測量誤差的關系曲線
從圖2可以看出,ε0和σε的選取對于CEP影響是相互約束的,通過仿真得出的不同的ε0與3σε配置的CEP關系曲線,可以作為在現有探測器偏角測量精度條件下,根據期望系統CEP選擇偏角修正門限的依據。考慮到在實際工程中硬件限制及客觀因素的影響是不可避免的,探測器的測量誤差必然存在,因此適當的提高偏角修正門限可以放寬末修子彈系統對目標測量精度的要求。所以選擇偏角修正門限 ε0=16°,偏角測量極限誤差3σε=18°,此時的系統 CEP不超過10m。
3.2 方位角及轉速測量精度優化
根據優化結果:當 ε0=16°,φ0=5°,3σε=18°時,通過仿真分析方位角測量誤差σφ和轉速測量誤差σγ對末修子彈系統精度的影響,結果如表3、表 4。
綜上,反輻射末修子彈系統參數選擇為偏角修正門限 ε0=16°,方位修正門限 φ0=5°,輻射源探測器偏角測量極限誤差3σε=18°,方位角測量極限誤差3σφ=30°,轉速測量極限誤差 3σγ=3°。

表3 ε0=16°,φ0=5°時 σφ對系統精度的影響

表4 φ0=5°時σγ對系統精度的影響
3.3 優化結果驗證
通過100次彈道仿真結果如圖3所示,統計落點射程誤差均值EX為 -3.176 m,橫偏誤差均值EZ為0.1912m,綜合誤差均值 ER為 5.7007m,系統 CEP約為6.4m,也就是說在引入本算例給出的系統參數指標的條件下,反輻射末修子彈經修正有50% 的落點位于以目標點為圓心、半徑為6.4m的圓域內。
通過以上仿真分析可以得出:偏角修正門限ε0=16°,方位修正門限φ0=5°,輻射源探測器偏角測量極限誤差3σε=18°,方位角測量極限誤差3σφ=30°,轉速測量極限誤差3σγ=3°。至此,反輻射末修子彈的主要系統參數指標都通過仿真實現了優化,最后利用優化得到的所有系統參數加以集成,考察反輻射末修子彈的最大修正量。

圖3 落點誤差

圖4 遠目標點Ti
根據表 2 所示,無控落點 OUC為(315.5,0,1.9)。為了得到系統最大修正量,相對于無控落點設定4個遠目標Ti使得末修子彈的沖推器充分作用,以實現末修子彈的最大修正能力。遠目標Ti如圖 4 所 示 ,T1(515.5,0,1.9)、T2(315.6,0,- 198.1)、T3(115.5,0,1.9)、T4(315.5,0,201.9)。
通過受控彈道仿真,末修子彈針對4個遠目標的落點如圖5所示。

圖5 遠目標點射程與橫偏的修正曲線
根據圖5可以得到末修子彈對于設定的4個遠目標發揮最大修正能力后的射程與橫偏修正曲線,對落點進行統計得到表5。通過表5能夠得出結論:在文中所給出的系統參數指標條件下,反輻射末修子彈的修正距離基本可以達到116m以上。
4 小結
分析了修正門限和探測器測量誤差對于末修子彈修正精度的影響。確定了輻射源探測器在偏角測量極限誤差3σε=18°、方位角測量極限誤差 3σφ=30°、轉速測量極限誤差3σγ=3°條件下的系統最優偏角修正門限ε0=16°、最優方位修正門限φ0=5°,并通過仿真進行驗證,實現了CEP約為6.4m的末修精度;此外,還利用文中優化過的系統參數,計算出了反輻射末修子彈系統的修正距離為116m以上,這些結論對于反輻射末修子彈進一步的工程化應用具有重要的理論價值。

表5 對于遠目標的最大修正量仿真
[1]姚文進,王曉鳴,高旭東,等.彈道修正彈脈沖修正機構簡易控制方法 I-J3.[J]彈道學報,2007,19(3):19 -22.
[2]Vincent T L,Cottrell R G,Morgan R W.Minimizing maneuver adv ant age requrirements for a hit-to-kill inter ceptor[ J]. Journal of Aerospace Engineering,2005,219(2):113- 129.
[3]Subchan S. Minimum-time optimaltr ajectories for the terminal bunt manoeuvre,AIAA 2005-5968[R].2005.
[4]王佳偉,霍鵬飛,陳超.基于蒙特-卡洛法的沖推器數量與沖量優化[J].探測與控制學報,2010,32(1):92-97.
[5]霍鵬飛.反輻射末修子彈精度仿真分析[R].中國兵器工業集團第212研究所.
[6]徐明友.高等外彈道學[M].北京:高等教育出版社,2003.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
