基于A*算法的質量特性測試流程規劃
2013-11-28 02:22:24陳剛
航天器環境工程
2013年6期
陳 剛
(上海航天設備制造總廠,上海 200245)
0 引言
質量特性測試是航天器總裝過程中的大型測試項目之一,其操作難度高、測試項多、風險大。盡管近年來其測試方法已從質量、質心、轉動慣量單獨測試[1]逐漸發展為集成測試[2-3],但航天器質量特性測試仍是一項煩瑣的工作,包含了垂直工裝、水平工裝及航天器各方向的質心、轉動慣量的測試以及由此帶來的頻繁吊裝、精測和電氣操作。因此,測試前對相關操作流程進行合理規劃對發揮集成測試優勢、減少反復有著重要意義。
1 測試內容分析
通常,質量特性測試內容包括質量M、3個方向質心坐標 (xc,yc,zc)及 3個方向轉動慣量Ix、Iy、Iz。實際操作時,還必須首先調平測試臺體并對相應工裝進行測量。質量特性測試主流程見圖1。
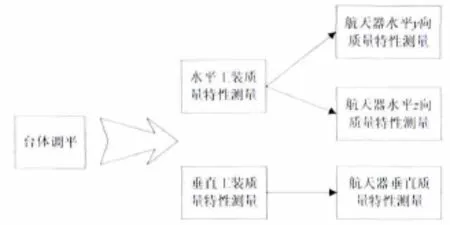
圖1 質量特性測試主流程Fig. 1 The main flow of the measurment of mass properties
任何一個測試項能夠執行的必要條件是同時具備正確的臺體狀態和控制狀態,而相關測試狀態的存在又與其前置狀態相依賴(如圖2所示)。因此,在設置某個測試項的狀態時,不可避免地要從其相依賴的狀態一步步變遷過來。
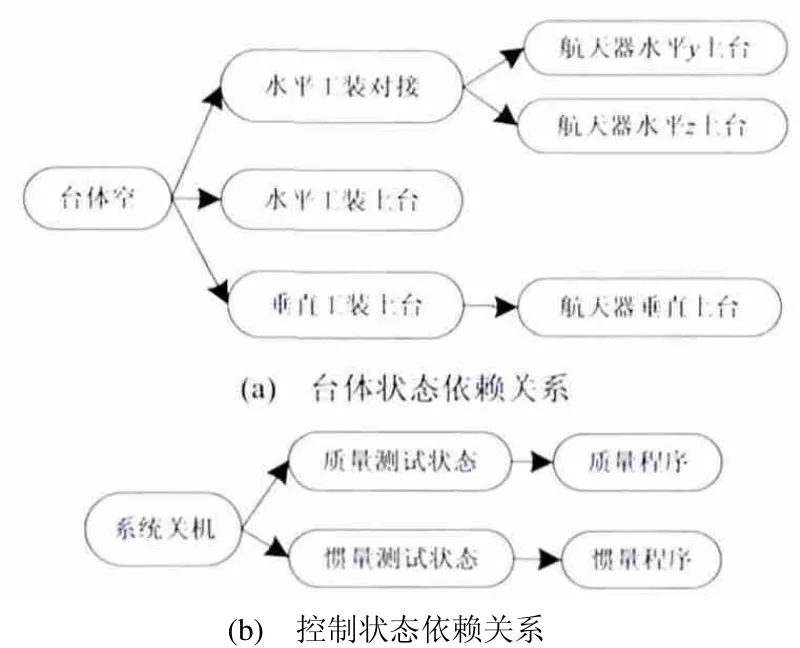
圖2 測試狀態依賴關系Fig. 2 The relationship among measuring states
2 測試路網建模
按上述分析,每個測試狀態等價于臺體狀態和控制狀態的組合,測試過程即可映射為在各個測試狀態間的變遷。本文將測試狀態變遷路徑的集合稱為測試路網,路網中的每一條路徑都是潛在的測試過程。
2.1 路網初始化
本文分別對工裝測試和航天器測試獨立進行路網初始化。原則上,路網中任意兩個狀態之間均能實現變遷,即任意兩個狀態節點均雙向連接,如圖3所示。……
登錄APP查看全文
