基于準確度分析的汽輪機調節系統建模仿真軟件
2013-11-25 02:44:24朱曉星盛鍇宋軍英
湖南電力 2013年2期
朱曉星,盛鍇,宋軍英
(1. 國網湖南省電力公司電力科學研究院,湖南 長沙410007;2. 國網湖南省電力公司,湖南 長沙410007)
開展汽輪機調節系統參數實測與辨識,建立電網穩定性研究所需的汽輪機調節系統數學模型,可用于系統地分析各種擾動條件下電網頻率響應和負荷響應曲線,對于電網穩定性的分析具有重要的實用價值〔1-5〕。
汽輪機調節系統模型是電網四大元件模型之一,其真實性直接影響電網系統仿真的精度〔6-12〕,因此,模型參數辨識方法的準確性和仿真校核方法的可靠性越來越受到重視。近年來有學者開發了汽輪機調節系統參數辨識與仿真軟件,但由于缺乏表征仿真校核準確程度的參數和指標,這些軟件的仿真功能都只是簡單地把實測曲線與仿真曲線進行粗略的人工比較,沒有定量和定性地分析仿真準確程度。
文獻〔13〕Q/GDW 748 -2012 《同步發電機原動機及其調節系統參數實測與建模導則》(下文簡稱《導則》)提出了仿真品質參數,并規定了仿真與實測對比中各品質參數的偏差允許值〔13〕。本文對汽輪機調節系統參數辨識和仿真校核技術進行了研究,并依據該導則,以Matlab/Simulink 為平臺開發了1 套汽輪機調節系統參數,實現了原始試驗數據的智能預處理、模型參數的智能辨識與結果選出、仿真品質參數偏差值的自動計算。
1 軟件功能結構
軟件分為數據預處理、參數智能辨識、智能仿真校核、輔助功能等四大功能模塊,功能結構如圖1 所示,其中帶虛框的為軟件內部實現的功能。
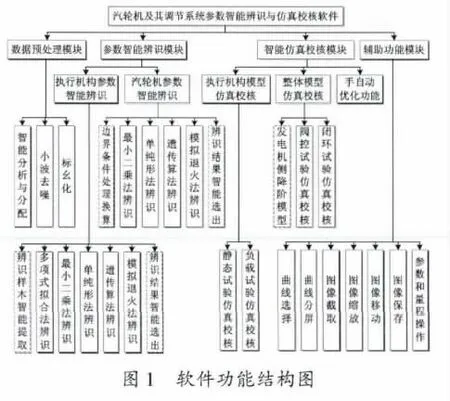
數據預處理模塊可同時載入多個或單個原始數據文件,并自動分析原始數據文件格式,根據參數命名特征將各列原始數據智能分配給各參數變量,并提供小波去噪、數據標幺功能,以便進行后續的參數辨識和仿真校核。
參數智能辨識模塊主要分執行機構參數智能辨識和汽輪機參數智能辨識共2 個部分,根據各部分參數辨識的特點,提供了多項式擬合、最小二乘法、單純形法、遺傳算法和模擬退火法等5 種辨識方法,可由用戶自行選擇其中的1 種或多種算法組合辨識,并自動對同一參數在不同辨識樣本、不同辨識方法下的多個辨識結果進行最終值的智能選出。
智能仿真校核模塊中,對復雜的發電機模型和勵磁系統模型進行了合理簡化,并利用Matlab/Simulink 建立了考慮發電機側影響的汽輪機調節系統模型,可以很好地仿真出負載條件下頻率階躍擾動試驗中常見的功率過調波峰,仿真曲線準確度高。根據《導則》要求,界面上提供了汽輪機執行機構模型分別在靜態試驗和負載試驗條件下的仿真校核,以及汽輪機調節系統模型分別在閥控方式和閉環方式下的整體仿真校核等4 項仿真校核功能,能分別計算每一項仿真校核功能中各仿真品質參數的仿真與實測偏差值,從而判斷辨識得到的模型參數準確度是否合格。
輔助功能模塊中,提供了方便曲線、圖像操作的一些功能,以及參數和量程的設置、保存與提取等功能,以便用戶使用。
2 數據預處理
汽輪機調節系統的參數實測現場采集的數據量很大,不同數據采集儀的數據輸出格式不統一,各個信號的量程和單位不相同,且必定含有噪聲信號,因此無法直接用于參數辨識,必須先對現場采集的原始數據進行預處理。
本文對主流便攜式高速數據采集儀生成的原始數據文件格式、現場需采集的各參數命名規律、現場實測中影響原始數據輸出格式的常見問題等進行了分析,基于Matlab 編寫了用于原始數據智能分析函數varconfirm,其格式如下:
function [oriData txtDataName DataFields varflag pl row ] =varconfirm (fullname)
其中,返回的參數意義見表1。
通過編寫varconfirm 函數,實現了自動分析各主流便攜式高速數據采集儀生成的原始數據中包含何種參數、將原始數據分配給各個參數變量,以及自動計算采樣周期、采樣時長等功能;當分析出錯時,還能提供相應錯誤信息,指導用戶處理。整個分析、分配的過程在用戶選取了用于參數辨識的原始數據文件(可同時選擇多個文件)之后自動進行,無需人工干預。
此外,軟件還提供了小波去噪、數據標幺等〔14〕功能,與varconfirm 函數一起,實現了將原始數據用于參數辨識的整個預處理過程。
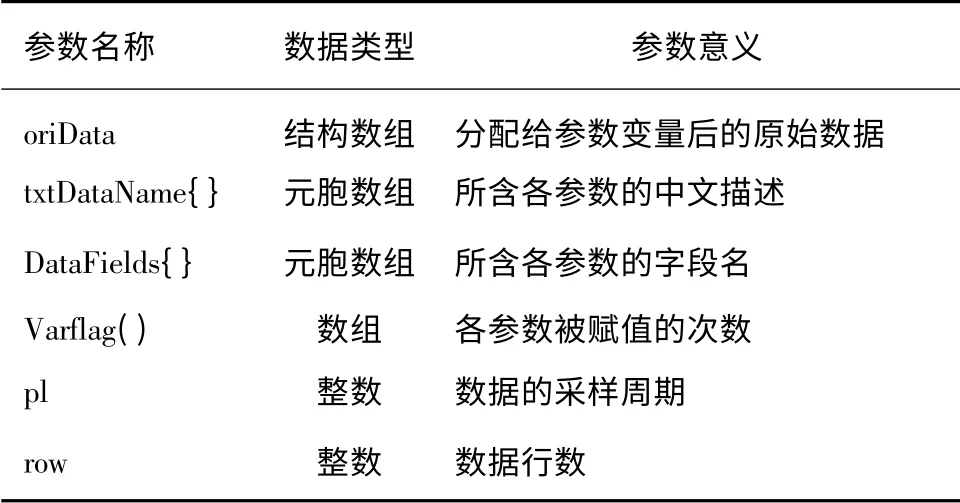
表1 智能分析函數varconfirm 的返回參數及意義
3 參數智能辨識
汽輪機調節系統的參數辨識與建模可分為調節系統、執行機構、汽輪機共3 個部分。調節系統的相關參數主要是通過控制邏輯檢查、資料收集來獲取,其過程相對簡單;而執行機構和汽輪機的部分重要參數需要通過對現場實測數據進行辨識獲得。
軟件提供了“執行機構參數辨識”、 “汽輪機參數辨識”以及“其他參數辨識”等3 個參數辨識界面。
“執行機構參數辨識”的流程如圖2。它主要是對靜態條件下執行機構階躍試驗數據進行辨識,以獲取綜合反映整個油動機特性的油動機開啟時間常數TO、油動機關閉時間常數TC。
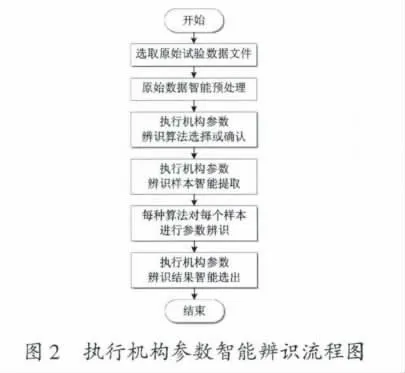
執行機構參數智能辨識如圖3 所示。用戶選取用于執行機構參數辨識的原始數據文件后,只需勾選軟件提供的多項式擬合、最小二乘法、單純形法、遺傳算法、模擬退火法等多種辨識算法中的1種或多種,軟件即根據閥位信號的微分數據自動提取每條數據曲線中可能存在的多個參數辨識樣本(如圖3 中顯示的數據曲線包括了3 次閥門開/關的辨識樣本),并用每一種勾選的辨識算法分別對每一個辨識樣本進行參數辨識,最后通過預設的選優算法選出最終辨識結果TO,TC。

“汽輪機參數辨識”主要是對閥控方式下的頻率擾動試驗數據進行辨識,以獲取汽輪機模型中蒸汽容積時間常數TCH、再熱器時間常數TRH、交叉管時間常數TCO。對于高壓蒸汽容積環節、再熱蒸汽容積環節這種1 階慣性環節,可以認為從頻率階躍開始,到特征量達到新穩態后變化量的63.2%所需的時間為該容積環節時間常數。考慮到現場測點的布置,可以將調節級壓力作為高壓蒸汽容積的集中參數,將中壓缸進汽壓力代表再熱器的蒸汽壓力〔15〕。而交叉管時間常數可通過對中壓缸進汽/排汽壓力的變化數據及趨勢進行辨識確定。軟件辨識界面及流程與執行機構參數辨識相似。
“其他參數辨識”主要提供各缸功率比例、功率過調系數、汽輪機轉速慣性時間常數等相對簡單的參數辨識和計算功能。如高壓缸功率過調系數λ可由式(1)計算得到:

式中 ε 為是進排汽壓比,k 為過程絕熱系數。
4 智能仿真校核
4.1 建立考慮發電機側影響的模型
目前國內汽輪機調節系統建模相關的研究,一般都將重點放在參數辨識上,而仿真功能比較粗糙,甚至存在一定程度的失真。其中很重要的一點就是功率在頻率擾動下的仿真響應曲線沒有實測曲線中常見的過調波峰,而這恰恰是電網穩定計算需要考慮的一個重點指標。《導則》中將階躍試驗中功率快速變化過程達到的最大值減去初始功率的數值定義為高壓缸最大出力增量PHP,是最重要的汽輪機調節系統仿真與實測偏差允許值指標之一。
功率響應仿真曲線沒有過調波峰的主要原因是因發電機模型和勵磁系統模型比較復雜,要建立考慮發電機側影響的汽輪機調節系統模型非常困難,故大多模型中沒有考慮發電機側相關因素的影響。
為提高仿真曲線的準確度,本文采用發電機降階模型來代替全階模型。根據Prony 分析的思想基礎,通過輸出/輸入在擾動作用下的關系,可以從全階模型中抽取出線性化的低階模型,從而得到相關的傳遞函數。在基于參數實測的前提下,考慮勵磁系統和PSS 影響的發電機模型可用一個2 階傳遞函數表示。如式(2)為某機組發電機的降階模型:

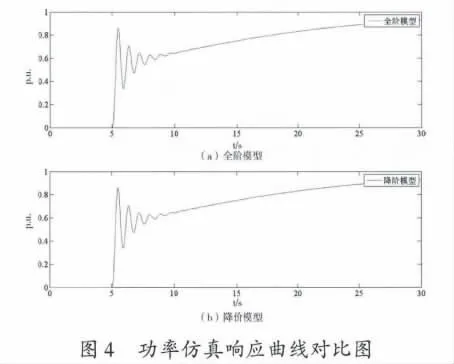
圖4 是以該機組辨識所得參數在PSASP 中建立的帶全階發電機的汽輪機調節系統模型和在本軟件中建立的降階模型,分別在同一頻率擾動下的功率仿真響應曲線。
圖4 表明:在本軟件中建立的發電機降階模型功率仿真響應曲線和全階模型響應曲線具有幾乎完全相同的變化趨勢,能很好地仿真出頻率階躍擾動試驗中的機組有功功率響應特性。
4.2 仿真校核
根據《導則》要求,仿真校核應包括汽輪機執行機構模型的仿真校核和汽輪機調節系統模型整體仿真校核2 個方面。
汽輪機執行機構模型應在機組靜態條件下分別進行開度大階躍和開度小階躍擾動仿真校核,且應在負載條件下進行開度小階躍擾動仿真校核,主要的仿真品質參數是上升時間tup和調節時間ts。
汽輪機調節系統整體模型仿真校核是對調節系統、執行機構、汽輪機等3 個部分的模型及參數辨識結果的整體性仿真校核,其目的是為了確認整個模型與參數是否能夠真實反映實際汽輪機特性。應在負載條件下,與汽輪機閥控方式下總閥位指令階躍試驗的功率實測響應曲線,以及閉環方式下頻率擾動試驗的功率實測響應曲線分別進行仿真校核。主要的仿真品質參數包括汽輪機高壓缸最大出力增量PHP、汽輪機高壓缸峰值時間THP和調節時間ts。
軟件界面上提供了以上4 項仿真校核功能,輸入模型參數后,只需選取用于對應校核項目的實測曲線原始數據文件,軟件即可自動計算各仿真品質參數的仿真與實測偏差值,并與《導則》要求的允許值進行比較,從而判斷辨識得到的模型參數準確度是否合格。
4.3 手自動優化
現有的汽輪機調節系統模型對實際系統進行了簡化,有些環節沒有考慮;有些環節雖然在模型中有體現,但現有的技術手段無法精確獲取這些環節的參數。因此在現場實測、參數辨識過程一切正常的情況下,可能還是會出現仿真品質參數偏差值超過允許值的情況。
針對這種客觀情況,參考相關文獻〔16〕并根據大量仿真試驗結果,對影響仿真品質參數的因素及其影響作用進行了分析,見表2。
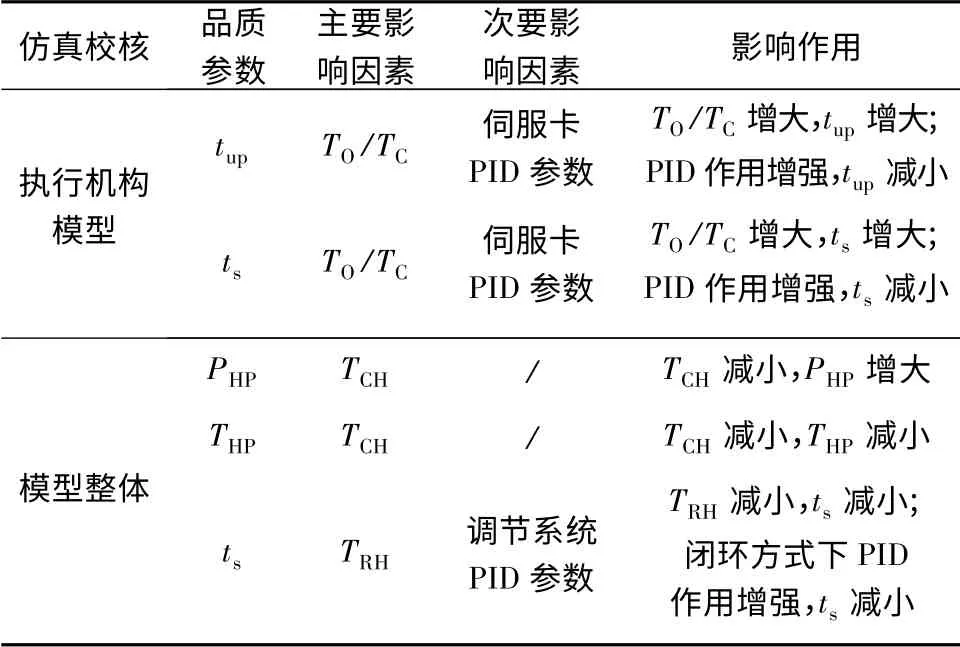
表2 仿真品質參數的影響因素及作用
基于以上分析,本軟件提供了仿真品質參數偏差手自動優化功能:軟件仿真校核界面上提供仿真曲線、實測曲線、仿真品質參數偏差值和允許值的顯示,且以可編輯狀態列出模型相關參數。當某仿真品質參數偏差值超過允許值時,用戶可根據提示手動調整模型相關參數,再重新進行仿真校核,可方便直觀地看出調整后的仿真校核結果;逐步調整直到所有的仿真品質參數偏差合格為止,即為手動優化功能。自動優化功能的原理與手動優化相同。
5 應用實例
用軟件對某330 MW 熱電機組汽輪機調節系統參數現場實測原始數據進行辨識,主要參數辨識結果見表3。
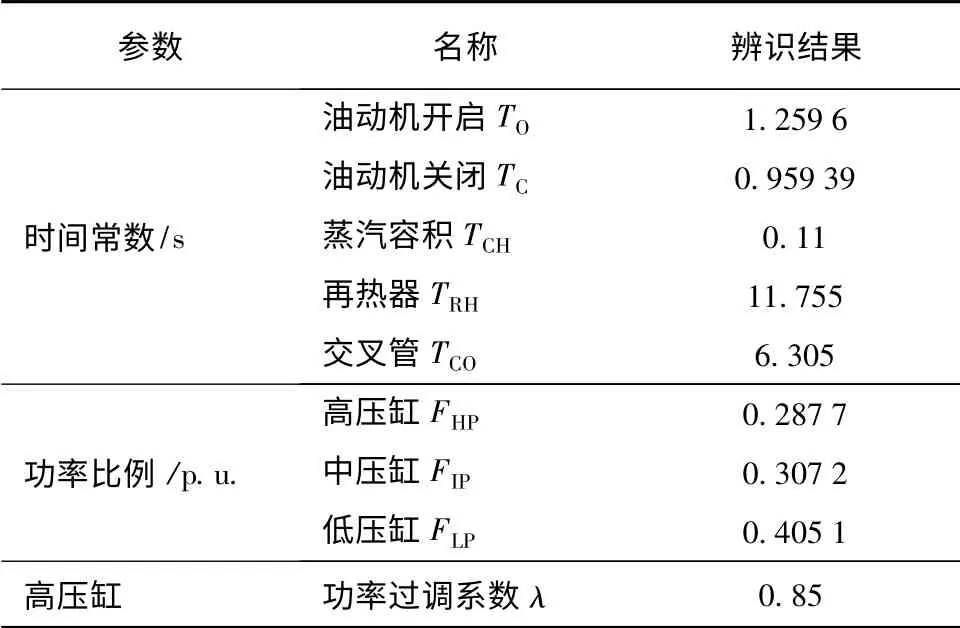
表3 主要參數辨識結果
將該機組的模型參數輸入本軟件中,進行各項仿真校核,仿真校核結果見表4。

表4 某330 MW 熱電機組模型仿真校核結果
從該機組模型的仿真校核結果可以看出,各項仿真品質參數值均在允許值范圍內,說明辨識得到的汽輪機調節系統模型參數能夠真實反映實際汽輪機的執行機構特性和功率響應特性。
6 結論
文章以Matlab/Simulink 為平臺開發了汽輪機調節系統參數,在對現場實測原始數據文件常見格式進行分析的基礎上,實現了對汽輪機調節系統參數實測原始數據的自動分析、分配、去噪和標幺等預處理;采用多項式擬合、最小二乘法、單純形法、遺傳算法、模擬退火法等多種先進算法進行參數辨識,并按預設選優算法進行最終辨識結果的選出,實現了模型參數的智能辨識;建立了考慮發電機側影響的汽輪機調節系統模型,提高了仿真曲線準確度;通過仿真品質參數偏差值的自動計算,實現了對辨識所得模型參數準確度的定量和定性分析;最后對影響仿真品質參數的因素及影響作用進行了分析,實現了仿真品質參數的手自動優化功能。
對實際機組進行參數辨識和仿真校核結果表明,本軟件功能上能滿足《導則》要求,且參數辨識結果精確,仿真校核準確度高,為根據《導則》開展汽輪機調節系統參數實測、辨識與仿真校核提供了良好平臺。
〔1〕竺煒、唐穎杰,譚喜意,等. 發電機調速附加控制對系統頻率穩定的作用〔J〕. 電力自動化設備,2008,28 (12):21-24.
〔2〕張仰飛,袁越,陳小虎,等. 汽輪發電機組的調速系統參數辨識〔J〕. 電力自動化設備,2006,26 (12):32-35.
〔3〕李陽海,張才穩,楊濤,等. 基于電網穩定性分析的汽輪機調速系統建模試驗研究〔J〕. 汽輪機技術,2011.53 (4):291-294.
〔4〕高偉,李陽海,黃樹紅,等. 600 MW 汽輪機調速系統試驗及辨識研究〔J〕. 汽輪機技術,2006.48 (4):284-286.
〔5〕王官宏,黃興. 汽輪機調速系統參數對電力系統阻尼特性的影響〔J〕. 電力自動化設備,2011,31 (4):81-90.
〔6〕盛鍇. 高壓汽室蒸汽容積環節模型參數對再熱凝汽式汽輪機調速系統仿真校驗的影響〔J〕. 華東電力,2012,40 (11):2 049-2 053.
〔7〕文賢馗,鐘晶亮,錢進. 電網低頻振蕩時汽輪機控制策略研究〔J〕. 中國電機工程學報,2009,29 (26):107-111.
〔8〕宋新立,劉肇旭,李永莊,等. 電力系統穩定計算中火電廠調速系統模型及其應用分析〔J〕. 電網技術,2008,32 (23):44-49.
〔9〕劉輝,田云峰,吳濤. 考慮機組協調控制的汽輪機調速器模型及其應用〔J〕. 電力系統自動化,2008,32 (22):103-107.
〔10〕趙婷,田云峰. 用于電網穩定分析的電液伺服及執行機構數學模型〔J〕. 電力系統自動化,2009,33 (3):98-103.
〔11〕黃青松,徐廣文. 水輪機調速系統自定義建模與應用〔J〕.電力系統自動化,2012,36 (16):115-117.
〔12〕劉輝,楊寅平,田云峰,等. 電力系統強迫功率振蕩實例及機理分析〔J〕. 電力系統自動化,2012,36 (10):113-117.
〔13〕國家電網公司. Q/GDW 748—2012 同步發電機原動機及其調節系統參數實測與建模導則〔S〕. 北京:中國電力出版社,2012.
〔14〕朱偉民,谷俊杰,劉武林,等. 基于Matlab GUIDE 的汽輪機及調速系統參數辨識數據處理軟件〔J〕. 湖南電力,2012,32 (1):13-16.
〔15〕田云峰,郭嘉陽,劉永奇,等. 用于電網穩定性計算的再熱凝汽式汽輪機數學模型〔J〕. 電網技術,2007,31 (5):39-44.
〔16〕王穎,王印松,李中華. 300 MW 汽輪機調速系統模型與非線性分析〔J〕. 汽輪機技術,2007,49 (1):17-20.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年5期)2021-01-04 01:29:00
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
廣西電力(2016年4期)2016-07-10 10:23:38