艦艇編隊雷達網探測范圍的實時計算方法*
2013-11-23 07:54:18鄭守鐸
艦船電子工程 2013年9期
關鍵詞:艦艇
方 良 鄭守鐸
(中國人民解放軍92941部隊 葫蘆島 125000)
1 引言
隨著遠程打擊武器,精確制導武器的使用,以及反雷達措施的不斷完善,現代雷達正面臨日趨嚴重的威脅[1],給傳統的單部雷達系統設防反輻射導彈、隱身目標、超低空目標和綜合電子干擾等四大威脅帶來了極大困難[2],雷達性能的有效性和生存能力都受到了嚴峻的挑戰,在這種情況下,通過合理的雷達組網,可提高海上編隊雷達網自身抗干擾、抗目標低空入侵、抗反輻射導彈和抗隱身目標的能力。如何計算艦艇編隊雷達網探測范圍,對于實現艦艇編隊雷達網多種威力指標的計算,進而為雷達網實際效能評估及部署優化,具有重要意義[3~4]。
文獻[5]提出了一種采用逐點計算的方法模擬雷達網平面探測范圍,該方法利用Window API函數PtIn-Region,判斷一個點是否在雷達網探測范圍內[5],但函數Ptlnregion并不能總是可靠地返回正確結果,其原因之一可能是因為庫函數的參數均為整形數據,而用戶一般采用浮點型[6],文獻[4]通過改進計算幾何的射線法,提供了一個新的判斷函數,該方法需要排除很多特殊情況,實現較為復雜。本文提出了一種艦艇編隊雷達網探測范圍的實時計算方法,能夠精確地得到未受干擾和干擾后雷達網每個方向的探測范圍,在雷達網邊界提取過程中提出一種更方便的邊界提取方法即逐段判斷法,并在艦艇編隊雷達網有干擾和無干擾條件下對雷達網探測范圍進行了仿真,從仿真結果可以看出該方法效率較高且較精確,從而找到一種對艦艇編隊雷達網探測能力進行評估的新方法,為下一步雷達網效能評估及優化部署作準備。
2 單部雷達的探測范圍
2.1 無干擾條件下警戒雷達對目標的探測距離
無干擾條件下,警戒雷達對目標的探測距離由雷達對目標的最大作用距離及雷達的通視距離所決定,雷達的探測距離計算公式如下[7]

其中,Rmax是雷達對目標的最大作用距離;Rs為通視距離。

式中,Pt為雷達發射功率(W);Gt為雷達天線增益(dB);λ為雷達工作波長(m);σ為目標雷達截面積(m2);K為波爾茲曼常量,取為1.38*10-23瓦*秒/度;T0為絕對溫度,取為290K;Δfr為雷達接收機帶寬(Hz);Fn為噪聲系數;(SN)min為雷達的最小檢測信噪比,定義為雷達發現概率為0.5時接收端的信噪比。

式中,ht為目標高度;hr為雷達高度。
2.2 噪聲干擾條件下警戒雷達對目標的探測距離
在噪聲干擾條件下,單部警戒雷達對目標的最大探測距離為[8]

式中,Pt為雷達發射功率(W);Gt為雷達天線增益(dB);λ為雷達工作波長(m);σ為目標雷達截面積(m2);Nr為雷達的內部噪聲;Nj為雷達接收的干擾機噪聲;(SN)min為雷達的最小檢測信噪比,定義為雷達發現概率為0.5時接收端的信噪比。

式中,K為波爾茲曼常量,取為1.38*10-23瓦*秒/度;T0為絕對溫度,取為290K;Δfr為雷達接收機帶寬(Hz);Fn為噪聲系數;

式中,Pj(i)為第i部干擾機的發射功率(W);Gj(i)為第i部干擾機的天線增益(dB);γj(i)為第i部干擾機干擾信號對雷達天線的極化損失;Rj(i)為第i部干擾機到雷達的距離(m);Δfj(i)為第i部干擾機的帶寬(Hz);G′t(θji)為雷達天線主瓣指向目標方向時,在第i部干擾機方向上的增益(dB)。
2.3 坐標轉換
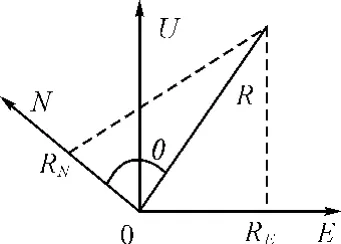
圖1 雷達水平探測距離的ENU 坐標系轉換圖
在得到單部雷達在每個方向上的探測距離后,首先轉化為本地切平面笛卡爾坐標,這里使用東北上坐標系(ENU-East-North-Up),如圖1所示,E代表正東方向,N代表正北方向,U代表垂直向上方向。
當雷達指向與正北方向的夾角為θ時:

將單部雷達的探測范圍在ENU 坐標系下離散成360個點,即每隔一度一個點,由式(7)即可得到單部雷達探測距離邊界在360°范圍內ENU 坐標系下的坐標值。
在得到該雷達探測范圍邊界ENU 坐標系下的坐標值后,將該坐標值轉換到地心直角坐標系(ECR-earth-centered-rotating)下,得到地心直角坐標系下的坐標值Rx(θ)、Ry(θ)、Rz(θ),兩個坐標系具體的轉換關系參見文獻[9]。
則該雷達在ECR坐標系下各方向的探測范圍邊界為
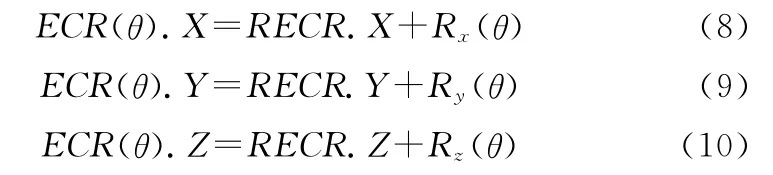
式中,ECR(θ).X,ECR(θ).Y,ECR(θ).Z分別為該雷達在與正北方向夾角為θ時,探測范圍邊界在ECR 坐標系下的坐標值,RECR.X為雷達自身在ECR 坐標系下的x坐標,RECR.Y為雷達自身在ECR 坐標系下的y坐標,RECR.Z為雷達自身在ECR 坐標系下的z坐標。
最后再將該雷達在ECR 坐標系下的探測范圍邊界的坐標值轉化到大地經緯度高度坐標系(LLA-Latitude-Longitude-Altitude)下,得到LLA 坐標系下坐標值Lat(θ),Lon(θ),Alt(θ),ECR 坐標系到LLA 坐標系的轉換參見文獻[9]。
通過以上坐標轉換即可得到每部雷達探測邊界在大地經緯度高度坐標系下360°范圍內的坐標值。
3 雷達網平面探測范圍邊界提取
在求得艦艇編隊雷達網內各雷達單元的平面探測邊界之后,經交叉、重疊構成雷達網的整體平面探測邊界。提取出雷達網的平面探測邊界,可更加直觀地顯示雷達網的威力,對于態勢標繪有一定的應用價值[10],可為雷達網效能評估及優化部署作準備。各單部雷達探測邊界已經得到,關鍵是怎樣判斷各單部雷達的探測邊界是否是雷達網的探測邊界。
3.1 邊界提取原理
通過計算判斷各單部雷達的探測范圍邊界上的點是否在其他雷達探測范圍之內,如果該點在其他某個雷達的探測范圍之內,這個點就不是雷達網探測范圍邊界的點,如果該點不在其他任何雷達探測范圍之內,這個點就是雷達網探測范圍邊界點。
這里關鍵要解決的問題是如何判斷點是否在一個區域內,這里采用逐段判斷法來進行判斷。
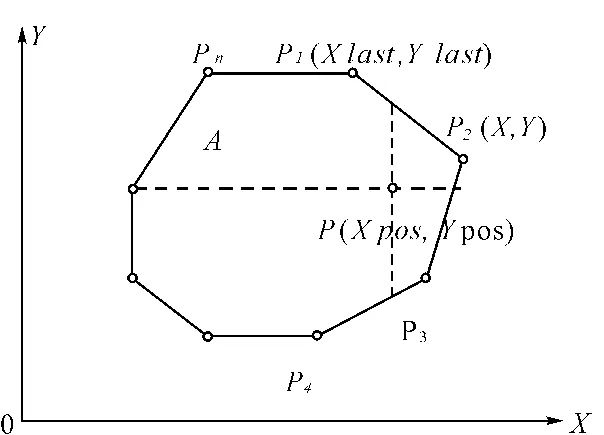
圖2 判斷點是否在區域內示意圖
如圖2所示,多邊形A的頂點序列P1,P2,…,Pn(順時針排列),從點P1(Xlast,Ylast)開始,順時針旋轉逐段判斷點P是否在多邊形區域內。
利用逐段判斷法判斷點是否在區域內的算法流程如圖3所示。
通過上述步驟,可計算出過點P與區域的橫交點數及縱交點數,如果橫交點數為奇,則該點在區域內,否則判段縱交點數的奇偶性,如果縱交點數為奇,則該點在區域內,否則該點在區域外。
3.2 雷達網邊界點確定
在第2節中,得到了單部雷達探測范圍邊界360°范圍的經緯度坐標,利用這些經緯度坐標和3.1節介紹的邊界提取原理,判斷出每一部雷達探測范圍邊界點是否在其他雷達探測范圍之內,通過計算得出所有不在其他雷達探測范圍內的點,這些點即為雷達網邊界點。
4 仿真應用
假設某艦艇編隊中有四艘艦艇A、B、C、D和一架預警機E:
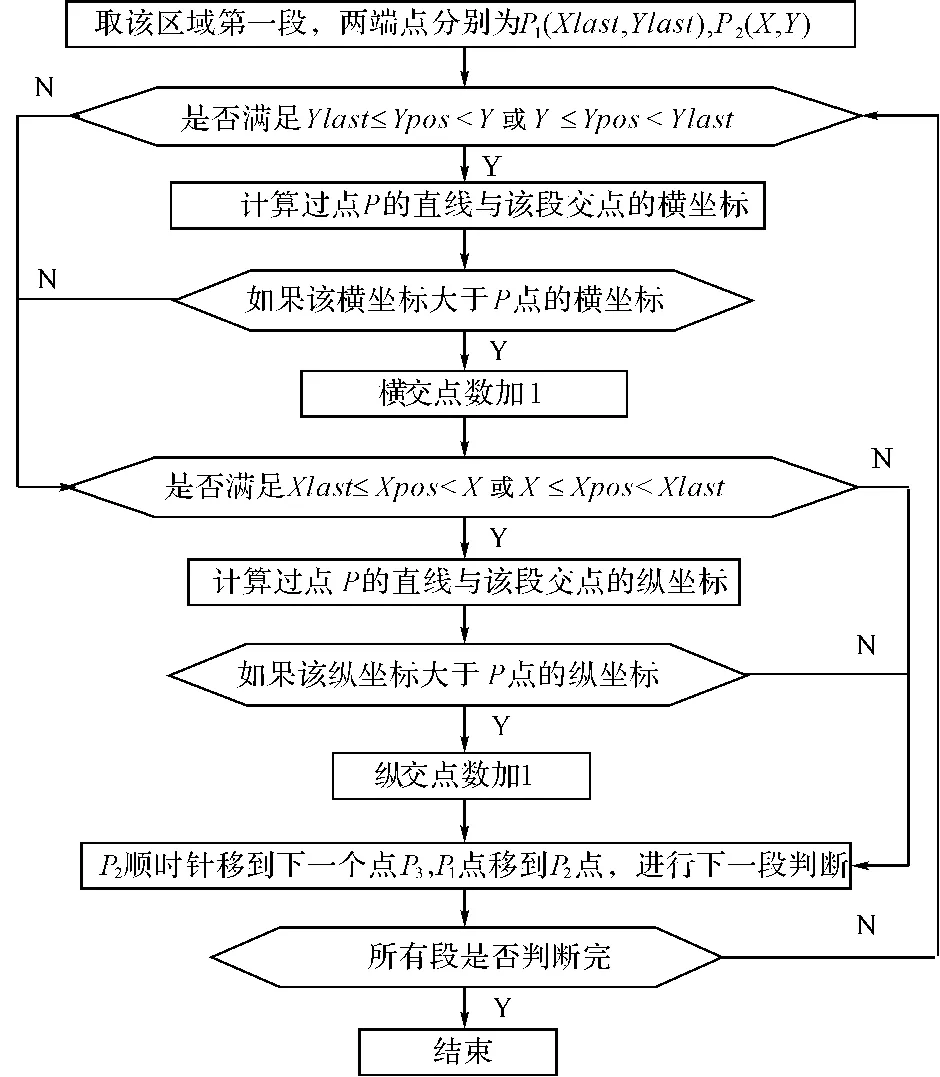
圖3 算法流程圖
仿真場景1:假設艦艇A為編隊指揮艦,該艦艇編隊的對海警戒區域為一個140×140 的區域加600×600 的區域,艦艇A對海警戒雷達的探測距離為50km,位于(400,400)處。艦艇B、C、D對海警戒雷達探測距離為60km,艦B位于(440,400),艦C位于(360,400),艦D位于(400,460)。預警機E對海搜索距離為300km,位于(400,780)。圖4是艦艇編隊雷達網無干擾時對海整體探測范圍圖,圖5是艦艇編隊雷達網無干擾時對海探測邊界提取圖。
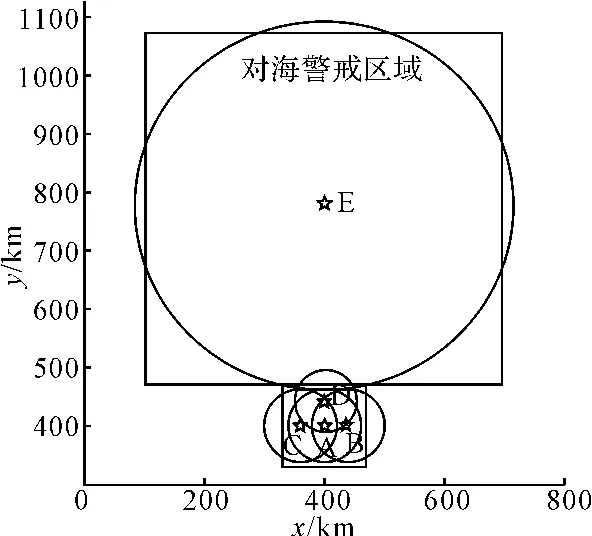
圖4 艦艇編隊雷達網無干擾時對海整體探測范圍圖
仿真場景2:在場景1情況下,在距離艦艇編隊融合中心A800km 左右,有一敵方噪聲壓制干擾,在圖4編隊模式下,根據式(4)求得雷達網威力范圍,圖6是艦艇編隊雷達網干擾時對海整體探測范圍圖,圖7是艦艇編隊雷達網干擾時對海探測邊界提取圖,由圖可見雷達網對海警戒范圍有較大壓縮。
從仿真結果看出,艦艇編隊雷達網邊界提取完整準確,在Windows系統、CPU 主頻3.0G 硬件環境下運行耗時僅需0.04s,可見在仿真效率、精度方面均有較好表現,仿真結果表明了本文所述算法的正確性和有效性。
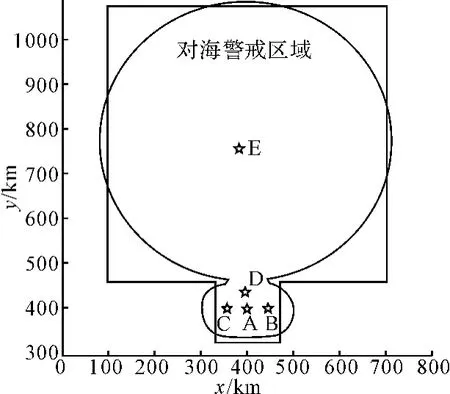
圖5 艦艇編隊雷達網無干擾時對海探測邊界提取圖

圖6 艦艇編隊雷達網干擾時對海整體探測范圍圖
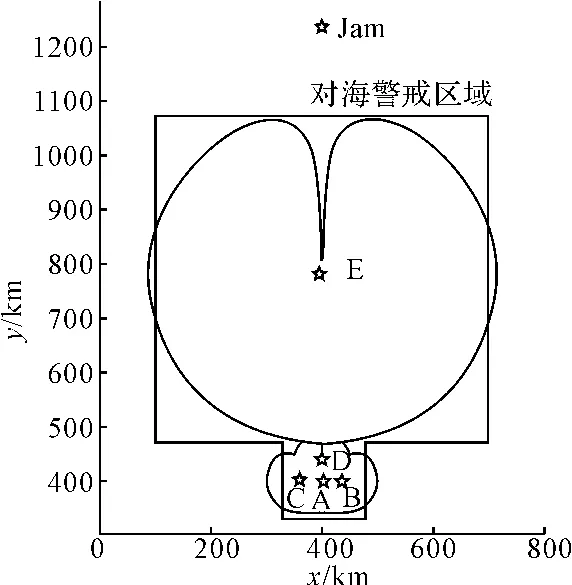
圖7 艦艇編隊雷達網干擾時對海探測邊界提取圖
5 結語
本文提出了一種艦艇編隊雷達網探測范圍的實時計算方法,能夠精確地得到未受干擾和干擾后雷達網每個方向的探測范圍,在雷達網邊界提取過程中提出一種更方便的計算方法即逐段判斷法,并在艦艇編隊雷達網在有干擾和無干擾條件下對雷達網探測范圍進行了仿真,從仿真結果可以看出該方法效率較高且較精確,從而找到一種對艦艇編隊雷達網探測能力進行評估的新方法,為下一步雷達網效能評估及優化部署作準備。
該方法不僅適用于海上艦艇編隊雷達網的探測范圍計算,同樣適用用于其他岸基雷達網探測范圍的計算。
[1]孫宏剛,姚景順.海上編隊雷達網的優化及抗干擾效能分析[J].現代雷達,2005,27(3):12-14.
[2]劉以安,孟現海,楊華明.粒群算法在雷達優化組網中的應用研究[J].兵工學報,2007,28(5):547-550.
[3]李昌錦,陳永光.電子戰環境下組網雷達檢測性能分析與仿真[J].火力與指揮控制,2007,32(1):14-17.
[4]Wu Xiaoling,Shu Lei,Yang Jie.Swarm Based Sensor Deployment Optimization in Ad Hoc Sensor Networks[J].ICESS,LNCS 3820,2005:533-541.
[5]王樹文.計算機模擬雷達網平面探測范圍的一種繪制方法[J].空軍雷達學院學報,1999,13(3):51-53.
[6]李海嬌.Visual C++庫函數PtInRegion 存在的問題及修正[J].華東交通大學學報,2005,22(5):88-91.
[7]Merrill I.Skolnik.Introduction to Radar Systems[M].publishing House of Electronics Industry,2007:5-6.
[8]許大秦,李照順.警戒雷達被干擾時探測范圍的實時計算方法[J].火力與指揮控制,2009,34(6):128-130.
[9]許大琴,李照順.警戒雷達被干擾時探測范圍的實時計算方法[J].火力與指揮控制,2009:128-130.
[10]周啟明,王中杰,李俠.雷達網威力仿真中的復雜區域圖形處理算法[J].現代防御技術,2008,36(1):87-91.
猜你喜歡
小學生學習指導(小軍迷聯盟)(2023年5期)2023-05-29 08:13:18
環球時報(2022-12-30)2022-12-30 15:15:00
軍事文摘(2022年13期)2022-08-27 01:26:26
鳳凰動漫(軍事大王)(2022年3期)2022-06-17 01:46:36
艦船科學技術(2022年5期)2022-04-19 10:58:46
軍事文摘(2021年21期)2021-11-14 10:14:56
軍事文摘(2017年24期)2018-01-19 03:36:16
兵器知識(2017年10期)2017-10-19 19:31:38
軍事體育學報(2014年3期)2014-02-27 16:00:16
船海工程(2013年6期)2013-03-11 18:57:37