彈藥自動(dòng)裝填機(jī)械手運(yùn)動(dòng)學(xué)分析
2013-11-21 12:22:40李郁峰潘玉田李魁武李貴虎
火炮發(fā)射與控制學(xué)報(bào)
2013年2期
李郁峰,潘玉田,李魁武,李貴虎
(1.中北大學(xué) 信息與通信工程學(xué)院,山西 太原 030051;2.西北機(jī)電工程研究所,陜西 咸陽(yáng) 712099;3.山西北方機(jī)械制造有限責(zé)任公司,山西 太原 030009)
彈藥自動(dòng)裝填機(jī)器人技術(shù)的研究是無人化作戰(zhàn)平臺(tái)的關(guān)鍵技術(shù)之一,研究能滿足大口徑火炮射速要求、實(shí)現(xiàn)任意角度裝填、彈種自動(dòng)識(shí)別和選擇、彈丸和裝藥自動(dòng)供給和輸送入炮膛的自動(dòng)裝填機(jī)器人系統(tǒng),對(duì)于火炮武器系統(tǒng)無人化的實(shí)現(xiàn)具有十分重要的意義[1]。
1 結(jié)構(gòu)及工作原理
1.1 總體布局
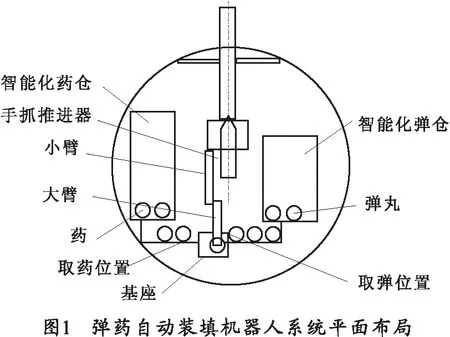
自動(dòng)裝填機(jī)械手安裝在炮塔旋轉(zhuǎn)盤或吊欄上,位于火炮后下方,確保機(jī)械手在初始位置時(shí)位于火炮后坐范圍之外。機(jī)械手手抓推進(jìn)器抓持彈或藥后,彈藥的軸線和輸彈槽軸線位于同一個(gè)平面內(nèi)。在這個(gè)平面上,炮尾輸彈槽的運(yùn)動(dòng)區(qū)域是以耳軸為圓心、炮尾到耳軸距離為半徑的一部分圓弧,這段圓弧上的各個(gè)位置點(diǎn)即為機(jī)械手的目標(biāo)位置[2]。自動(dòng)裝填機(jī)械手在整個(gè)自動(dòng)裝填系統(tǒng)中的位置如1圖所示。
1.2 動(dòng)作流程
彈藥自動(dòng)裝填機(jī)械手的任務(wù)是完成彈和藥的自動(dòng)裝填任務(wù)。自動(dòng)裝填機(jī)械手的動(dòng)作流程如圖2所示。當(dāng)主控機(jī)給出供彈指令后,彈倉(cāng)內(nèi)的彈鏈轉(zhuǎn)動(dòng),經(jīng)選彈后,將彈丸輸送至出彈倉(cāng)口,傳彈器將彈丸從彈倉(cāng)傳出至取彈位置,機(jī)械手手抓推進(jìn)器的兩個(gè)手爪同時(shí)夾緊炮彈。關(guān)節(jié)驅(qū)動(dòng)電機(jī)開始驅(qū)動(dòng)3個(gè)俯仰關(guān)節(jié)使機(jī)械手按規(guī)劃的路徑將彈送至炮尾輸彈槽后端,并使炮彈軸線與炮膛軸線重合。……
登錄APP查看全文
