瀝青混凝土路面邊模鋪裝機的設計
2013-11-12 03:50:22單根立張栩俊蔣立坤劉遙臻
河北科技大學學報 2013年3期
單根立,張栩俊,蔣立坤,劉遙臻
(河北科技大學機械工程學院,河北石家莊 050018)
公路瀝青路面是一種無接縫的連續式路面,是中國當前較為普遍的路面結構。瀝青路面具有行車平穩、舒適、耐磨、振動小、噪聲低、養護維修方便等很多優點,在各類公路和城市道路,尤其是高等級公路中得以廣泛應用[1-3]。中國高速公路的通車里程已接近9.6萬km,在已通車的高速公路中,瀝青路面占80%以上。目前中國瀝青砼面層施工大多采用先攤鋪瀝青砼面層,再安裝路緣石的方式,這種方式攤鋪的瀝青砼面層寬度均比設計寬度大10~20 mm,安裝路緣石時再切除多余的瀝青砼面層,既費事、費時又增加成本,切下來的瀝青還會造成材料浪費和環境污染。
瀝青混凝土路面邊模結構示意圖見圖1,是在瀝青砼面層攤鋪之前,預先鋪設在路邊兩端的設備。它在路的兩邊形成邊界,可以使攤鋪的瀝青邊緣直接成型,從而省去多余的邊部切割作業。相鄰2個邊模之間必須相互連接,其示意圖見圖2,并通過2個釘子固定在地面。
目前瀝青混凝土邊模一般是人工安裝,1 min安裝1條邊模,存在安裝速度慢、安裝順直度差、質量低、與瀝青混凝土路面的機械化施工不配套等缺點[4-6]。而瀝青混凝土路面邊模鋪裝機可以進行自動邊模鋪設,并保證相鄰2個邊模掛鉤連接,且用釘子固定安裝在地面,能確保安裝順直度,大幅度地加快瀝青路面的施工速度,縮短施工工期,并且節約成本和保護環境。
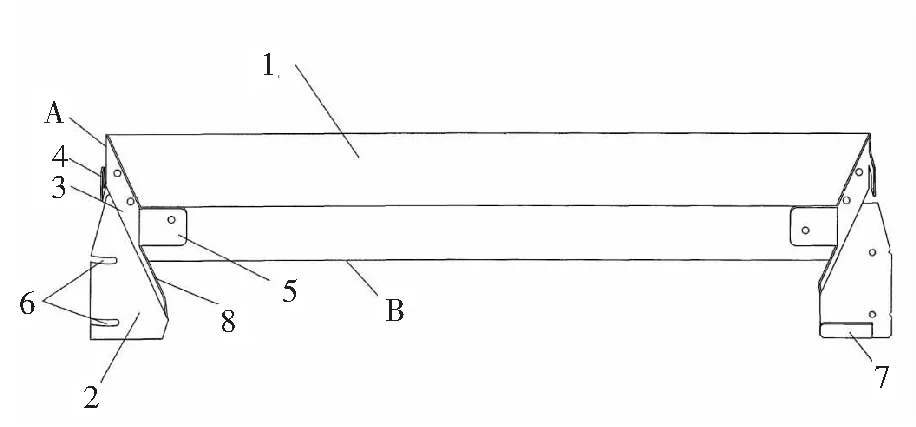
1-直體長條塊;2-底板;3-立板;4-掛鉤;5-外包板;6-弧形槽孔;7-輔助定位卡;8-小立板;A-內側面;B-底面圖1 瀝青混凝土邊模結構示意圖Fig.1 Structure diagram of asphalt concrete side mode
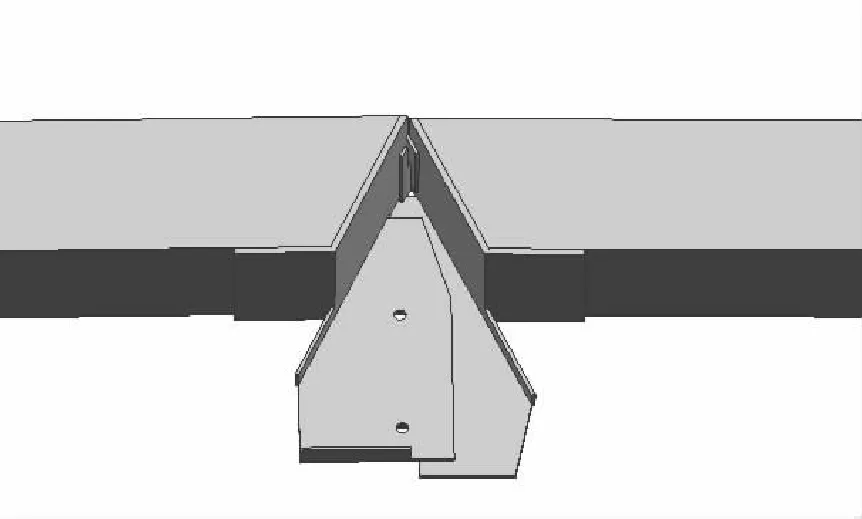
圖2 瀝青混凝土邊模連接示意圖Fig.2 Connection diagram of asphalt concrete side mode
1 總體結構
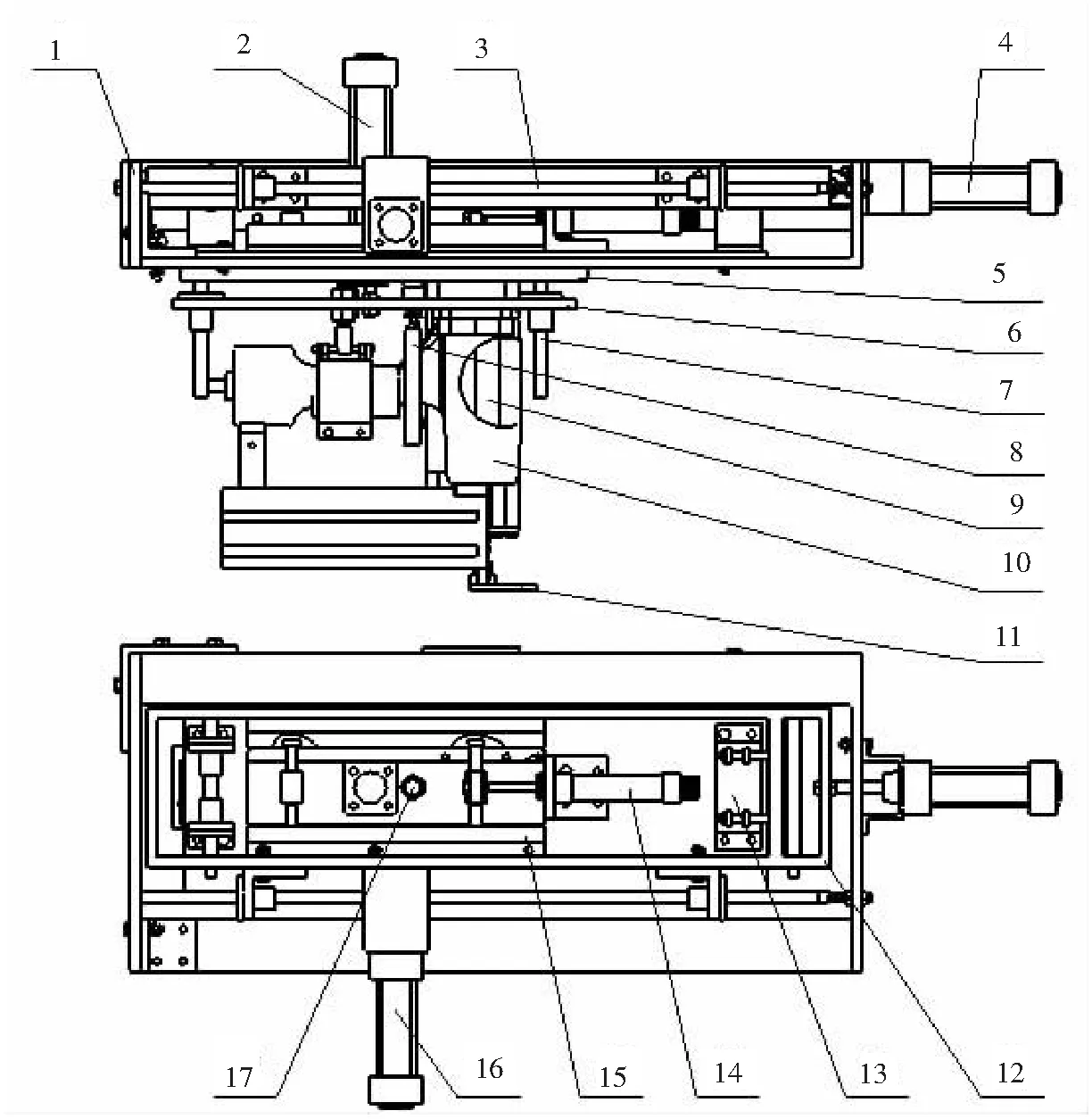
瀝青混凝土路面邊模鋪裝機主要由車體系統、掛鉤系統、射釘系統、PLC控制系統構成。車體系統主要是由車架、電機、減速器、電磁離合器、方向軸[7-8]、步進電機、圖像傳感器組成;射釘系統由三坐標工作平臺、執行氣缸、射釘槍、定位模塊構成;掛鉤系統主要由邊模料倉、滑道、各氣缸等組成;PLC控制系統主要由PLC、氣動電磁換向閥、光電傳感器組成。其總體結構見圖3。
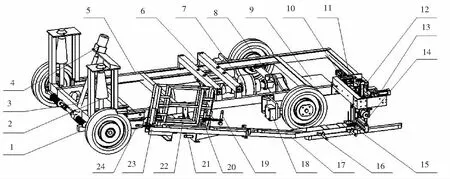
1-圖像傳感器;2-減震彈簧;3-方向軸;4-步進電機;5-車架;6-電機;7-減速器;8-電磁離合器;9-PLC;10-X1方向氣缸;11-X2方向氣缸;12-Z方向氣缸;13-Y方向氣缸;14-射釘槍;15-邊模壓緊氣缸1;16-靠模氣缸;17-滑道;18-剎車塊;19-邊模壓緊氣缸2;20-掛鉤壓下氣缸;21-頂起氣缸;22-出料氣缸;23-料倉;24-掛鉤氣缸圖3 瀝青混凝土路面邊模鋪裝機總體結構圖Fig.3 Overall structure of side mode paving machine
2 工作原理
2.1車體系統工作原理
啟動按鈕,電機開始運轉,鋪裝車由前面的圖像傳感器采集并識別地面畫好的白線并沿線行駛。走到預定位置,光電傳感器發出信號使電磁離合器脫開電機,且剎車塊伸出,壓緊車輪,鋪裝機停止行走,掛鉤和射釘系統同時開始工作。當掛鉤和射釘系統工作完一個周期后,發出信號使PLC控制電磁離合器吸合,剎車松開,電機帶動鋪裝機再次行走。
2.2掛鉤系統工作原理
開機之前,需預鋪設5條邊模。當鋪裝機行走到一定位置停止后,掛鉤系統開始工作。首先邊模壓緊氣缸2伸出,壓緊在滑道上與料倉相鄰的邊模,然后出料氣缸伸出,從料倉中推出一個邊模,頂起氣缸伸出,把剛推出的邊模頂起一定高度,隨后掛鉤氣缸伸出,推動邊模到前述被壓緊的邊模掛鉤上方,頂起氣缸縮回,邊模由于重力作用而落下,此時2個邊模通過掛鉤連接在一起。為了防止2個邊模連接不實,掛鉤壓下氣缸伸出,確保2個邊模連接緊,這時2個邊模通過掛鉤完全連接在一起。掛鉤壓下氣缸縮回,出料氣缸縮回,下一個邊模等待落下,邊模壓緊氣缸縮回,掛鉤系統的一個周期結束。
2.3射釘系統工作原理
射釘系統結構圖見圖4,其主要用于完成兩邊模連接處的射釘作業,在射釘槍上有定位模塊,可以使得射釘槍準確地定位在兩邊模連接孔處,并進行射釘。
1-架體;2-Z方向氣缸;3-X方向導向軸;4-X方向氣缸;5-射釘槍架1;6-射釘槍架2;7-導向軸;8-扳機;9-模具氣缸;10-射釘槍;11-模具;12-X1方向架子;13-軸承架;14-X2方向氣缸;15-導軌;16-Y方向氣缸;17-扳機氣缸圖4 射釘系統結構圖Fig.4 Nail system structure diagram
首先2個靠模氣缸伸出,將邊模推在滑道一邊,然后2個邊模壓緊氣缸伸出,從上方把邊模壓緊,從而使得需要完成射釘作業的邊模位置完全固定。定位模塊氣缸Z向伸出帶動模塊向下行走,直到定位模塊壓住2個連接著的邊模底板,X1方向氣缸推動模塊移動,直到定位模塊的邊頂住小立板,Y方向氣缸推動模塊移動直到定位模塊的邊頂住輔助定位卡。這時模塊的一個釘孔與邊模釘孔完全重合,Z方向氣缸帶動射釘槍向下運動,直到槍頭壓住模塊,扳機氣缸縮回扣動扳機,射釘槍打下一個釘,扳機氣缸伸出。Z方向氣缸帶動射釘槍縮回,X2氣缸帶動射釘槍移動至第2個釘孔,扳機氣缸再次縮回,射釘槍打下第2個釘,然后返回原位置,這時邊模被固定在路面上。
3 關鍵結構系統
3.1自動尋跡系統
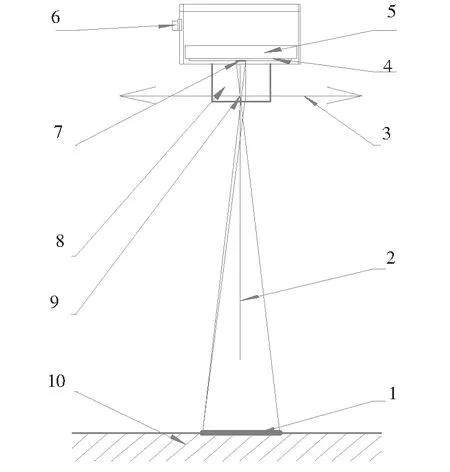
1-地面標線;2-鏡頭光軸;3-等效透鏡中線;4-CCD傳感器;5-電路板;6-插座;7-標線的像;8-鏡頭;9-光心;10-地面圖5 測量系統光路圖Fig.5 Optical path diagram of the measuring system
為了使鋪裝機跟蹤預定路線,必須設置標線監測裝置和方向控制機構對標線進行實時測量,當鋪裝機的行走方向偏離標線的時候能夠自動調整行進方向。以車輪位置為控制目標,通過閉環PID自動控制完成跟蹤標記行走的任務。應用線陣CCD(charge coupled device,電荷耦合器件)圖像傳感器[9-14],配以圖5所示的光路構成標線檢測環節,由單片機比較車輪位置與標線的誤差,經PID調節以后驅動電機,帶動方向控制環節調整運行方向,使車輪沿著標線行駛,完成自動尋跡系統的任務。選用TCD1206線陣CCD傳感器配合圖5所示的光路,在單片機P89V51RD2的控制下構成標線檢測環節。單片機P89V51RD2同時還控制步進電機的轉動,根據檢測到的偏差大小和方向,控制電機運行的時間和方向,完成自動尋跡工作。
為了避免環境對CCD圖像傳感器的影響,選用可調光圈鏡頭,光圈的調整根據工作環境的照度確定。圖像傳感器放置在標線的正上方,由于白色與地面的顏色形成亮度差,地面在傳感器上的成像是“黑色”區域,對應點讀出的數據為“0”,標線背景圖像是“白色”區域,對應讀出的數據為“1”。
每只TCD1206線陣CCD傳感器有效像素為2 160點,每點尺寸14 μm,總長度2 160×14 μm=30.24 mm。因此,測量光路物距與相距之比設定為1∶10,測量的分辨率為0.14 mm,也就是CCD傳感器上的每一個像素點代表標線上的0.14 mm長度。所以測量范圍在2 160×0.14=302.4 mm以內,即標線應該在鏡頭光軸左右150 mm以內,可以進入傳感器的測量區域,超出這個區域將會發生尋跡失敗問題。當鋪裝車進入標線區,傳感器位于標線正上方時自動進入閉環尋跡狀態。單片機設定采樣周期為10 ms,根據偏移誤差控制和矯正鋪裝機的偏移。
3.2邊模出倉系統
瀝青混凝土路面邊模以10個為1組從下往上疊著放在邊模料倉中。邊模料倉下方留出空間,保證邊模被氣缸順利推出,邊模料倉是由鋼板條焊接而成,邊模料倉直接安插在底座上。當一個料倉中的10條邊模鋪設完畢后可很容易地更換料倉,從而實現無間隔鋪裝。
邊模在料倉機構中被推出時需要出倉機構的輔助,出倉機構整體由軌道、壓塊、滾輪、氣缸和滑動輪組成[15-17]。其中滑動輪(由軸承代替)放置在導軌上帶動整個機構的運動,能夠保證滑動的流暢性和穩定性。滾輪(由軸承代替)固定在壓塊的前端,能夠保證在出倉機構推動邊模時,滾輪接觸邊模,而且在后續的運動中邊模能夠與滾輪呈現滑動關系,從而減少摩擦力。
頂起氣缸通過螺紋連接固定在底座上,通過氣缸的推動作用和連桿結構,從而使連桿的頂端作往復運動,在往復運動中當氣缸伸出至最大時,連桿應該保證與地面垂直,從而保證將邊模頂起固定的高度。邊模壓緊氣缸和掛鉤壓下氣缸都固定在滑道的正上方,氣缸伸出即可固定邊模。
當出料氣缸推出一個邊模并縮回之后,在料倉中的邊模就會隨著重力的作用而落下,為下一次的出倉做好準備。邊模掛鉤完成后,需要從底座撤離,為下一個掛鉤動作做準備。在撤離過程中,由于掛鉤處的特殊結構,導致整個滑道必須與地面保持10°左右,才能保證邊模離開底座時不會脫鉤,而且滑道的出口處與地面的距離需要保證在3 mm內。在邊模滑出滑道后應該保證邊模仍然呈直線滑動,因此滑道后面布置兩塊平板。
在滑道的尾部安裝了1個光電傳感器,用于感應并控制鋪裝機何時停止。在鋪裝機開始行走時,光電傳感器一直貼于滑道上邊模的邊緣。直至鋪裝機行走了一條邊模的長度時,光電傳感器正好位于2個邊模連接的縫隙處,從而獲得信號并傳給PLC控制系統,使PLC控制電磁離合器脫開,且讓剎車氣缸伸出,使剎車塊頂住車輪,使鋪裝機的位置固定,保證邊模出倉及射釘能順利完成。
4 PLC控制系統
PLC控制系統主要用來檢測傳感器信號,控制氣動電磁換向閥換向,控制電磁離合器以及實現各氣缸的伸縮,從而實現邊模的安裝。控制流程圖如圖6所示。

圖6 控制系統流程圖Fig.6 Flow chart of the control system
5 結 語
瀝青混凝土路面邊模鋪裝機采用了自動尋跡系統,可自動識別標線并沿著標線行走,并且自動鋪設安裝邊模。邊模鋪裝速度可達每分鐘4條,克服了人工安裝邊模速度慢、順直度差等缺點,并能與瀝青攤鋪機配合使用,加快瀝青混凝土路面邊模鋪裝的速度,提高邊模的鋪裝質量。
參考文獻/References:
[1] TAN Yiqiu,CHEN Fengchen,LIU Hao, et al. New approach for calculating permanent deformation in asphalt pavement[J]. Journal of Harbin Institute of Technology,2010,17 (5):711-715.
[2] SHI Chunxiang,GUO Zhongyin. Mechanical properties of asphalt pavement structure in highway tunnel[J]. Journal of Shanghai Jiaotong University (Science),2008,13(2):206-210.
[3] XU Ke,ZHANG Xiaoning. Research on segregation evaluation methods of asphalt pavement based on air voids distribution[J]. Journal of Harbin Institute of Technology,2007,14(4):548-551.
[4] 李 冰.瀝青混凝土路面施工工藝及機群協同作業[D].西安:長安大學,2004.
LI Bing. Asphalt Concrete Pavement Construction Technique and Ground Machinery Coordination Working[D]. Xi′an:Chang′an University,2004.
[5] 劉建蘭.瀝青路面施工專家系統設計與實現[D].西安:長安大學,2003.
LIU Jianlan. The Design and Implementation of Asphalt Pavement Constructing Expert System[D]. Xi′an:Chang′an University,2003.
[6] 石懷榮,胡 娟.叉車減震墊檢測機構動力力學性能優化的設計研究[J].河北科技大學學報,2011,32(4):26-29.
SHI Huairong,HU Juan. Optimization design of dynamic performance of forklift shock pad feeler mechanism[J]. Journal of Hebei University of Science and Technology,2011,32(4):26-29.
[7] 孫宏兵.現代汽車電控技術與檢測探析[J].汽車實用技術,2011(10):24-25.
SUN Hongbing. Modern automotive electronic control technology and test analysis[J]. Autombile Technology,2011(10):24-25.
[8] 程開富.CCD圖像傳感器的市場與發展[J].國外電子元器件,2000(7):2-7.
CHENG Kaifu. The market analysis and development of CCD image sensor[J]. International Electronic Elements,2000(7):2-7.
[9] 唐心亮,劉克智,王林鋒.一種高性能全差分運算放大器的設計[J].河北科技大學學報,2012,33(1):52-57.
TANG Xinliang,LIU Kezhi,WANG Linfeng. Design of high-performance fully differential operational amplifier[J]. Journal of Hebei University of Science and Technology,2012,33(1):52-57.
[10] 李 勝.基于CCD圖像傳感器的高速圖像采集與傳輸系統的研究[D].成都:電子科技大學,2012.
LI Sheng. The Research of Image Sensor of High-speed Image Acquisition and Transmission System Based on CCD[D].Chengdu:University of Electronic Science and Technology of China,2012.
[11] 王 慧,余 靜.光電傳感技術中CCD圖像傳感器的研究[J].科技廣場,2008(7):226-228.
WANG Hui, YU Jing. The research of the CCD image sensor in photoelectric sensor technology[J].Science Mosaic,2008(7):226-228.
[12] 徐富新, 申冬玲, 吳承德,等.線陣CCD圖像傳感器的數據采集及其電路設計[J].湖南師范大學自然科學學報,2007,30(2):51-55.
XU Fuxin, SHEN Dongling, WU Chengde, et al. Data acquisition and circuit design of linear array CCD image sensor[J]. Journal of Natural Science of Hunan Normal University,2007,30(2):51-55.
[13] 楊曉林,尹殊勇.氣動技術在工業生產中的應用[J].建材技術與應用,2004(4):19-20.
YANG Xiaolin, YIN Shuyong. The application of pneumatic technology in industrial production[J]. Research & Application of Building Materials,2004(4):19-20.
[14] 龔肖新.壓入裝置繼電器控制氣動系統的設計[J].液壓與氣動,2007(6):32-33.
GONG Xiaoxin. The design of press-in equipment’s pneumatic system controlled by relay[J]. Chinese Hydraulics & Pneumatics,2007(6):32-33.
[15] 沈 蟬,路 波,惠偉安.氣動技術的發展與創新[J].流體傳動與控制,2011(4):7-10.
SHEN Chan, LU Bo, HUI Weian. The development and innovation of pneumatic technology[J].Fluid Power Transmission and Control,2011(4):7-10.
[16] MUNTASER M. Pneumatic, PLC controlled, automotive gear shifting mechanism [J]. Research Journal of Applied Sciences,Engineering and Technology,2010,2(3):245.
[17] 趙中敏,張秋云,楊 廣.PLC控制系統設計[J].機床電器,2007(2):37-40.
ZHAO Zhongmin,ZHANG Qiuyun, YANG Guang. The design of PLC control system[J]. Machine Tool Electric Apparatus,2007(2):37-40.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34