介入式手術(shù)機器人進展
2013-11-12 07:21:58李盛林沈杰言勇華陳大國
中國醫(yī)療器械雜志 2013年2期
李盛林,沈杰,言勇華,陳大國
1上海交通大學(xué)機器人研究所,上海市,200240
2 解放軍第四五五醫(yī)院,上海市,200052
血管介入手術(shù)是指醫(yī)生在數(shù)字減影血管造影機(DSA) 的導(dǎo)引下,操縱導(dǎo)管在人體血管內(nèi)運動,將導(dǎo)管從病人穿刺部位送至靶血管,對病灶進行治療。微創(chuàng)介入手術(shù)在臨床中有著廣泛的應(yīng)用,但隨著手術(shù)患者的不斷增多,傳統(tǒng)的微創(chuàng)介入手術(shù)也逐漸暴露出醫(yī)生長期受到X射線輻射、醫(yī)生培訓(xùn)周期長、手術(shù)準確度低等缺點[1]。這些缺點限制了血管介入手術(shù)的應(yīng)用。
由于手工操作介入手術(shù)的上述缺點,利用機器人實現(xiàn)導(dǎo)絲插入成了熱門的研究課題。由外科醫(yī)生遙控操作的介入手術(shù)機器人可以將導(dǎo)絲送進人體內(nèi),在手術(shù)過程中實現(xiàn)對導(dǎo)管的推進、后退和旋轉(zhuǎn),手術(shù)完成后能將導(dǎo)管拉離人體等功能,大大降低了醫(yī)務(wù)人員的勞動強度,也在一定程度上減少了手術(shù)對醫(yī)生個人技術(shù)熟練程度的依賴,能顯著提高手術(shù)成功率,減輕病人痛苦。由于介入過程醫(yī)生在隔離室操作,避免了醫(yī)生遭受手術(shù)時的X射線輻射[2-3]。
1 國內(nèi)外研究現(xiàn)狀
與其它手術(shù)機器人在神經(jīng)外科和骨科的應(yīng)用相比,血管介入手術(shù)機器人的研究起步比較晚,從二十世紀八十年代開始興起。
1.1 介入手術(shù)中的磁導(dǎo)航系統(tǒng)
研究人員已經(jīng)設(shè)計出了幾種類型的血管介入手術(shù)機器人。心血管介入手術(shù)采用了立體定向磁導(dǎo)航系統(tǒng)(見圖1),外科醫(yī)生能夠更有效地操作導(dǎo)絲、導(dǎo)管和其他磁性介入設(shè)備。在這個系統(tǒng)中,導(dǎo)管是特制的磁導(dǎo)管,一塊非常小的磁鐵被包埋在導(dǎo)管的尖端,這樣導(dǎo)管的方向就能被體外的磁場所控制。當(dāng)兩側(cè)的磁體旋轉(zhuǎn)時,在磁場范圍內(nèi)可產(chǎn)生不同強度和方向的磁場力,使得磁導(dǎo)管在不同的磁矩的作用下,改變尖端的方向[4]。導(dǎo)絲的前進和后退由機器人控制。該系統(tǒng)通過磁場非接觸方式定位導(dǎo)絲遠端,操作精度高;導(dǎo)絲頭部除了植入磁體外其它部分都十分柔軟,所以沒有血管穿孔的危險。立體定向磁導(dǎo)航系統(tǒng)的應(yīng)用代表著心血管介入手術(shù)治療在實現(xiàn)數(shù)字化中取得了重要的進步。

圖1 立體定向磁導(dǎo)航系統(tǒng)Fig.1 Stereotactic magnetic navigation system
1.2 心臟介入治療系統(tǒng)
以色列的海法心血管疾病研究所設(shè)計了一個適用于心臟介入治療遠程控制的機器人系統(tǒng)[5](見圖2),該系統(tǒng)包括一個床邊裝置和操作控制單元。床邊裝置安裝在手術(shù)臺,控制導(dǎo)絲前進、后退和旋轉(zhuǎn)運動。導(dǎo)絲的運動是由一對電機驅(qū)動的滾輪實現(xiàn)的。安裝在電機后面的一對被動輪用來監(jiān)視滾輪傳送導(dǎo)絲的情況。如果滾輪設(shè)備遇到障礙或者產(chǎn)生打滑,滾輪運動監(jiān)測裝置會報告故障,同時系統(tǒng)將暫時停止工作。操作控制單元遠離病床,由電腦觸摸屏控制臺和操縱桿組成。該系統(tǒng)用于治療冠狀動脈狹窄,對患者來說安全、可靠,對外科醫(yī)生來說完全避免了X射線輻射,且大大提高了手術(shù)的精度。

圖2 遠程控制心血管介入手術(shù)Fig.2 Remote control vascular interventional surgery
1.3 用于神經(jīng)外科的導(dǎo)管機器人系統(tǒng)
香川大學(xué)研制了用于治療血管神經(jīng)外科的導(dǎo)管操作機器人系統(tǒng)[6](見圖3)。導(dǎo)管操作機器人系統(tǒng)采用主從式結(jié)構(gòu)。該系統(tǒng)含有用于測量導(dǎo)管和血管之間接觸力的力傳感器,接觸力通過觸覺顯示裝置傳送給外科醫(yī)生。觸覺反饋可以保護血管免受損壞。
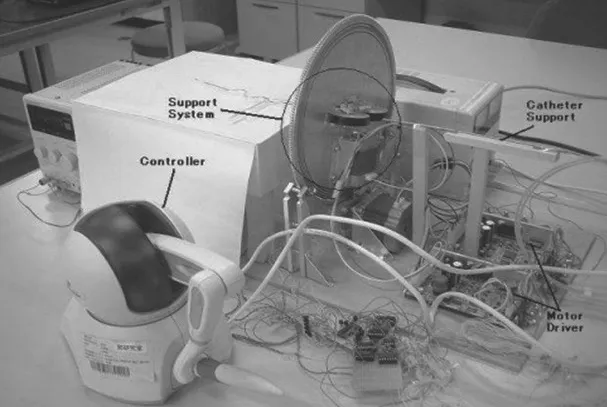
圖3 導(dǎo)管機器人系統(tǒng)Fig.3 Catheter operating robot system
1.4 用于腫瘤化療的介入手術(shù)機器人系統(tǒng)
上海交通大學(xué)設(shè)計了用于腫瘤化療和心血管疾病的介入手術(shù)機器人。介入手術(shù)機器人模型示意圖如圖4所示。外科醫(yī)生坐在監(jiān)控室,向機器人發(fā)送控制指令,機器人根據(jù)這些指令來控制導(dǎo)絲和導(dǎo)管的運動。介入手術(shù)機器人導(dǎo)絲導(dǎo)管的夾緊距離可調(diào),所以可以控制多種規(guī)格的導(dǎo)絲和導(dǎo)管[7]。現(xiàn)在大多數(shù)商業(yè)化的觸覺顯示設(shè)備是點顯示設(shè)備,因此觸覺反饋僅限于一些特定的類別,如穿刺、導(dǎo)管縫合等。但由于血管和導(dǎo)絲之間有許多接觸點,所以很難檢測出導(dǎo)絲和血管之間的所有的接觸力[8]。北京航空航天大學(xué)設(shè)計了碰撞檢測響應(yīng)模型,它將所有的接觸力都傳遞到頭部,從而可以使用現(xiàn)有的觸覺顯示設(shè)備進行檢測。
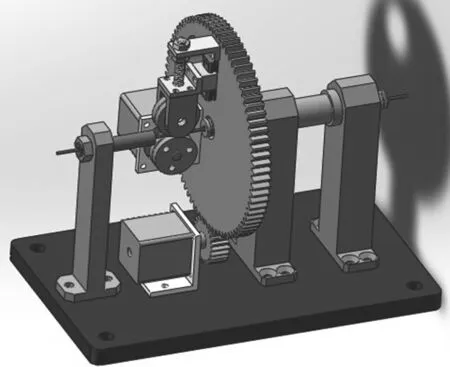
圖4 血管介入手術(shù)機器人模型Fig.4 Model of vascular interventional robot
2 血管介入機器人的關(guān)鍵技術(shù)
介入手術(shù)機器人包括機械裝置與控制系統(tǒng)、圖像導(dǎo)航系統(tǒng)和力反饋系統(tǒng)等。
2.1 機械裝置與控制系統(tǒng)
為了保護醫(yī)生避免受X射線照射,介入手術(shù)機器人機械裝置及控制系統(tǒng)通常采用主從式結(jié)構(gòu)[8],如上面提到的血管介入機器人。主控制臺位于遠離病人的監(jiān)控室,從動裝置位于病床的手術(shù)臺[9]。
由于介入手術(shù)高精確度的要求,一般采用步進電機來驅(qū)動機械裝置。在熒光圖像的指導(dǎo)下,外科醫(yī)生在主控制臺控制操縱桿,介入手術(shù)機器人檢測到醫(yī)生的這些動作,并復(fù)現(xiàn)醫(yī)生的動作,從而控制導(dǎo)絲的軸向(前進或后退)和旋轉(zhuǎn)運動[10]。軸向運動允許導(dǎo)絲沿血管前進或后退,當(dāng)導(dǎo)絲要進入血管的分支時,就需要旋轉(zhuǎn)運動。為了實現(xiàn)這些動作,機械裝置和控制系統(tǒng)應(yīng)符合下列要求[11]:
(1)介入手術(shù)機器人的機械裝置需要靈活地控制導(dǎo)絲運動,為了平穩(wěn)地移動,該機構(gòu)應(yīng)具有較小的慣性。
(2) 介入手術(shù)機器人可以精確地控制導(dǎo)絲的運動。
(3) 血管介入手術(shù)是很柔和的,導(dǎo)絲的運動的速度應(yīng)該是可調(diào)節(jié)的,即當(dāng)導(dǎo)絲在比較厚的血管中運動時可以比較快速地移動,當(dāng)在比較薄的血管中運動時需要降低速度。
(4) 當(dāng)介入手術(shù)機器人發(fā)生故障時,導(dǎo)絲和導(dǎo)管必須很容易地拆除。在這種情況下,外科醫(yī)生將會進行人工手術(shù)。
(5) 介入手術(shù)機器人可以方便地進行消毒。
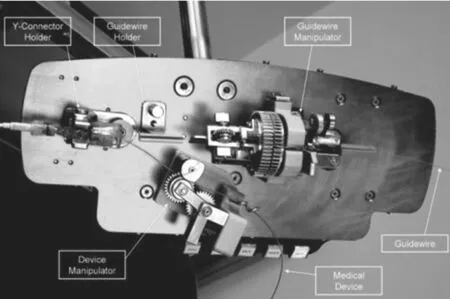
圖5 導(dǎo)絲插入機構(gòu)Fig.5 Device for insert wire
2.2 圖像導(dǎo)航系統(tǒng)
在傳統(tǒng)的血管介入手術(shù),外科醫(yī)生在二維數(shù)字減影血管造影(DSA)的指導(dǎo)下操縱導(dǎo)絲[12]。然而,由于血管重疊和透視,二維投影圖像會丟失三維血管的重要信息[13-14]。很多時候根據(jù)幾個二維投影圖像并不能準確確定血管系統(tǒng)的分布。外科醫(yī)生只有在解剖學(xué)為基礎(chǔ)的主觀經(jīng)驗上重建三維血管,這會延長手術(shù)時間,增加患者和醫(yī)務(wù)人員接觸X射線的時間。因此,需要能夠集成顯示導(dǎo)絲和血管并確保手術(shù)安全性的三維血管模型[15]。
近年來針對血管的三維血管模型進行了很多研究。磁共振血管造影(MRA)和計算機斷層掃描血管造影(CTA)可用于三維血管重建。Movassaghi[16]通過二維DSA血管圖像來重建三維血管圖像,該方法包括三個步驟:(1)校準DSA機,從而確定投影圖像的幾何形狀,并糾正失真圖像;(2)在血管介入手術(shù)之前從不同方位采取一系列二維血管造影,然后確定血管中心線、血管直徑和分叉點的特征,并在每個選定的突起構(gòu)建血管層次結(jié)構(gòu);(3)根據(jù)二維血管造影圖像得到的中心線和血管直徑來重建三維血管圖像。把投影視圖之間的夾角作為函數(shù)進行定量分析來檢驗三維血管模型的準確性,并討論如何確定最佳視圖來最大限度地減小血管重疊和透視。
導(dǎo)絲的位置相當(dāng)于血管中心線,對導(dǎo)絲的調(diào)整也被映射到重建的三維血管系統(tǒng)中[17]。這種方法實現(xiàn)了導(dǎo)絲和三維血管系統(tǒng)的綜合顯示。因此,外科醫(yī)生可以比較容易地控制介入手術(shù)機器人的運動。
2.3 力反饋系統(tǒng)
在傳統(tǒng)的微創(chuàng)介入手術(shù)中,醫(yī)生根據(jù)圖像用手來操作導(dǎo)絲,可以準確地感覺到導(dǎo)絲在血管中的受力情況,能在引導(dǎo)圖像不夠直觀的情況下保證導(dǎo)絲的安全介入。目前研究的主從式介入手術(shù)系統(tǒng)中,醫(yī)生脫離手術(shù)現(xiàn)場,借助主手手柄來實現(xiàn)導(dǎo)絲介入,不能很好地感知導(dǎo)絲在血管中的受力情況[18]。所以需要將導(dǎo)絲在介入過程中的受力情況反饋回來,作為參考信息提供給控制室內(nèi)的醫(yī)生,輔助其進行更加安全的導(dǎo)絲介入操作。
一些研究者利用固定在導(dǎo)絲頭部微力傳感器來測量血管和導(dǎo)絲頭部之間的接觸力[19]。然而,導(dǎo)絲和血管之間有許多接觸點,很難找到合適的位置來固定測量摩擦的微力傳感器。香川大學(xué)將微傳感器固定到導(dǎo)管的一側(cè),仍不能完整準確的計算出導(dǎo)管和血管之間所有的摩擦。
力反饋要傳遞到醫(yī)生手中,必須采用觸覺接口設(shè)備[20]。商業(yè)觸覺界面有很多種,但力反饋技術(shù)卻沒有廣泛應(yīng)用在臨床介入手術(shù)機器人中,這限制了介入手術(shù)機器人的廣泛應(yīng)用。所以,構(gòu)建一個能夠綜合各種影響血管阻力因素的模型是迫切需要解決的問題。
3 結(jié)論
介入手術(shù)機器人相比傳統(tǒng)的介入手術(shù)具有許多優(yōu)點。然而,機器人手術(shù)往往比對應(yīng)的傳統(tǒng)介入手術(shù)更昂貴,且大多缺乏力反饋的信息。介入手術(shù)機器人應(yīng)該著重在以下幾個方面加以改進:(1)介入手術(shù)裝置應(yīng)更靈敏、更緊湊、更容易控制;(2)影像導(dǎo)航系統(tǒng)應(yīng)該提供更多的血管信息,從而能夠更方便地進行手術(shù),縮短手術(shù)時間;(3) 在手術(shù)過程中應(yīng)該提供可靠的力反饋系統(tǒng),以便外科醫(yī)生能夠準確、實時地接收到反饋力的信息,從而精確、安全地完成手術(shù)。
遠程外科手術(shù)是一種很有前途的新領(lǐng)域,能夠打破地域限制使更多人都能享受到最先進的醫(yī)療技術(shù)。未來的介入手術(shù)機器人系統(tǒng)可集成先進的成像系統(tǒng)和力反饋系統(tǒng)。術(shù)前和術(shù)中X射線圖像可以提供給外科醫(yī)生大量的信息,甚至可能讓機器人手術(shù)系統(tǒng)自動執(zhí)行部分選定的手術(shù)過程。
[1] UCLA.robots in surgery:No longer science fiction[J].Clark Urological Center Newsletter,2002,14:1-2.
[2] 賀志秀,錢煒,宋成利,等.介入手術(shù)中導(dǎo)管導(dǎo)向機器人技術(shù)的發(fā)展[J].介入放射學(xué)雜志,2011,20(7):584-588.
[3] 賈博,田增民,盧旺盛,等.遙操作血管介入機器人的實驗研究[J].中國微侵襲神經(jīng)外科雜志,2012,17(5):221-224.
[4] Da L,Zhang D,and Wang T.Overview of the vascular interventional robot[J].Int J Med Robot Comp:MRCAS,2008.4(4):289-294.
[5] Beyar R,Gruberg L,Deleanu D,et al.Remote-control percutaneous coronary interventions:concept,validation,and first-in-humans pilot clinical trial[J].J Am Coll Cardiol(JACC),2006,47(2):296-300.
[6] Wang T,Zhang D,Da L,et al.Remote-controlled vascular interventional surgery robot[J].Int J Med Robot Comp,2010,6(2):194-201.
[7] 陳大國,沈杰,言勇華.機器人輔助導(dǎo)管插入系統(tǒng)技術(shù)進展[J].中國醫(yī)療器械雜志 .2010,34(1):35-38.
[8] Liu Cheng,Fu Yili.The design and implementation of virtual hand grasp behavior process in virtual assembly[J].哈爾濱工業(yè)大學(xué)學(xué)報(英文版),2010,17(4):527-530.
[9] 沈杰,李盛林,陳大國,等.基于激光鼠標(biāo)傳感器的導(dǎo)絲遙操作系統(tǒng)的設(shè)計與試驗[J].中國醫(yī)療器械雜志,2012,36(1):32-35.
[10]Thakur Y,Nikolov HN,Gulka IB,et al.Design and construction of a multipath vessel phantom for interventional training[J].Brit J Radio,2010,83(995):979-982.
[11]Wang J,Guo S,Kondo H,et al.A novel catheter operating system with force feedback for medical applications[J].Int J Inform Acquis,2008,5(1):83-92.
[12]Movassaghi B,Rasche V,Grass V,et al.A quantitative analysis of 3D coronary modeling from two or more projection images[J].IEEE T Med Imaging 2004,23:1517-1531.
[13]Jayender J,Azizian M,Patel RV.Autonomous image-guided robotassisted active catheter insertion[J].IEEE T Robot,2008,24(4):858-871.
[14]Lei X,Brian T,Eduard S,et al.Overview of image-guided radiation therapy[J].Med Dosim,2006,31(2):91-112.
[15]Saliba W,Cummings JE,Oh S,et al.Novel robotic catheter remote control system:feasibility and safety of transseptal puncture and endocardial catheter navigation[J].J Cardiovasc Electr,2006,17(10):1102-1105.
[16]Milickovic NB,Baltas D,Giannouli S,et al.Automatic reconstruction of catheters in CT based brace therapy treatment Planning[A].Proc EMBS[C],2000:2870-2874.
[17]Ernst S,Ouyang F,Linder C,et al.Initial experience with remote catheter ablation using a novel magnetic navigation systemmagnetic remote catheter ablation[J].Circulation,2004(109):1472-1475.
[18]Koji I,Masaki T,Takao N.Virtual endoscope system with force sensation[A].Proc IEEE ICRA[C],1999,3:1716-1721.
[19]Dargahi J,Sedaghati R,Singh H,et al.Modeling and testing of an endoscopic piezoelectric-based tactile sensor[J].Mechatronics,2007,17(8):462-467.
[20]Jan P,Joeri C,Dominiek R,et al.A micro optical force sensor for force feedback during minimally invasive robotic surgery[J].Sensors Actuat,2004,115:447-455.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
昆明醫(yī)科大學(xué)學(xué)報(2021年2期)2021-03-29 07:42:46
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
河北畫報(2020年10期)2020-11-26 07:20:50
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中國衛(wèi)生標(biāo)準管理(2015年3期)2016-01-14 03:41:47
西南軍醫(yī)(2014年5期)2014-04-25 07:42:48
