承德某選礦廠(chǎng)磨機(jī)運(yùn)行專(zhuān)家系統(tǒng)
2013-10-31 02:35:52王建民楊志剛李艷姣
金屬礦山 2013年7期
關(guān)鍵詞:系統(tǒng)
張 杰 王建民 楊志剛 李艷姣
(河北聯(lián)合大學(xué)電氣工程學(xué)院)
選礦是冶金、有色、貴金屬及化工等工業(yè)發(fā)展的基礎(chǔ),在當(dāng)今原材料加工工業(yè)中發(fā)揮著不可或缺的作用。選礦通常包括碎礦篩分、磨礦分級(jí)、選別、濃縮、脫水等工藝,其中磨礦分級(jí)和選別是選礦工序中最關(guān)鍵的工序,且磨礦分級(jí)作業(yè)是選別作業(yè)的基礎(chǔ),因此,強(qiáng)化對(duì)球磨機(jī)運(yùn)行狀態(tài)的檢測(cè)與控制是改善分選效果的前提[1]。磨機(jī)運(yùn)行狀態(tài)的一個(gè)重要參數(shù)是球磨機(jī)的負(fù)荷量,它包括新給礦量、循環(huán)負(fù)荷、加水量和加球量等[2]。目前,選礦自動(dòng)化技術(shù)起步較早的國(guó)家基本實(shí)現(xiàn)了對(duì)磨機(jī)負(fù)荷的自動(dòng)監(jiān)控;而我國(guó)選礦廠(chǎng)磨礦分級(jí)系統(tǒng)的控制起步較晚,控制技術(shù)也相對(duì)落后。由于磨機(jī)運(yùn)行機(jī)理復(fù)雜、慣性大且被控對(duì)象參數(shù)耦合性強(qiáng),加之其具有時(shí)變性、非線(xiàn)性和大滯后性,所以控制效果一般不理想[3-4]。本文介紹的基于模糊自尋優(yōu)控制的磨機(jī)運(yùn)行專(zhuān)家系統(tǒng)以承德某選礦廠(chǎng)一段磨礦分級(jí)系統(tǒng)為背景,該系統(tǒng)既具有PID控制的穩(wěn)定性和可靠性,又能發(fā)揮模糊控制魯棒性強(qiáng)的優(yōu)點(diǎn),同時(shí)自尋優(yōu)控制還能很好地解決磨機(jī)負(fù)荷最佳工作點(diǎn)實(shí)時(shí)漂移的問(wèn)題,是目前國(guó)內(nèi)外先進(jìn)的磨機(jī)自動(dòng)控制系統(tǒng)。
1 一段磨礦分級(jí)系統(tǒng)工藝流程
該選礦廠(chǎng)一段磨礦共有6個(gè)系列,每個(gè)系列工藝設(shè)備聯(lián)系圖見(jiàn)圖1。

圖1 一段磨礦分級(jí)系統(tǒng)工藝設(shè)備聯(lián)系示意
碎礦最終產(chǎn)品從磨選廠(chǎng)房的粉礦料倉(cāng)經(jīng)調(diào)速計(jì)量皮帶引出,再經(jīng)喂料皮帶給入一段球磨機(jī),同時(shí)自動(dòng)加球機(jī)和安裝電動(dòng)閥門(mén)的球磨機(jī)加水管分別向球磨機(jī)內(nèi)補(bǔ)加鋼球和水;新給料與分級(jí)機(jī)返砂在球磨機(jī)內(nèi)完成研磨后進(jìn)入螺旋分級(jí)機(jī),螺旋分級(jí)機(jī)的返砂返回球磨機(jī)再磨,分級(jí)機(jī)溢流進(jìn)入后續(xù)作業(yè)。
2 磨機(jī)運(yùn)行特性
球磨機(jī)運(yùn)行時(shí)動(dòng)態(tài)特性非常復(fù)雜,具有非線(xiàn)性、大慣性和純滯后性,時(shí)變使得磨機(jī)負(fù)荷的最佳工作點(diǎn)不停地漂移,較強(qiáng)的參數(shù)耦合性使得難以針對(duì)該過(guò)程建立精確的數(shù)學(xué)模型。在磨礦分級(jí)系統(tǒng)運(yùn)行過(guò)程中,物料特性、鋼球狀況、球磨機(jī)襯板磨損等的不恒定性都會(huì)對(duì)磨機(jī)運(yùn)行特性產(chǎn)生影響[5-6]。圖2為球磨機(jī)的工作特性曲線(xiàn)[7],直觀(guān)地反映了球磨機(jī)的功率特性P、出力特性F、磨音特性S與磨機(jī)內(nèi)料量M的關(guān)系。

圖2 球磨機(jī)工作特性曲線(xiàn)
從圖2可知,球磨機(jī)運(yùn)行過(guò)程中,磨機(jī)內(nèi)料量為M1時(shí)功率最大,磨機(jī)內(nèi)料量為M2時(shí)出力最大。M1、M2將整個(gè)磨機(jī)內(nèi)料量劃分為Ⅰ、Ⅱ、Ⅲ區(qū)段。磨機(jī)在Ⅰ區(qū)段運(yùn)行時(shí),其出力和功率均較低;在Ⅱ區(qū)間運(yùn)行時(shí),磨機(jī)的出力和功率均較高;在Ⅲ區(qū)間運(yùn)行時(shí),磨機(jī)的出力急劇變動(dòng)且功率較低,該區(qū)間由于磨機(jī)內(nèi)料量較多,往往容易出現(xiàn)漲肚現(xiàn)象。綜上所述,磨機(jī)在Ⅱ區(qū)間內(nèi)運(yùn)行才能保持平穩(wěn)、高效、低能耗。
3 基于模糊自尋優(yōu)控制的磨機(jī)運(yùn)行專(zhuān)家系統(tǒng)
3.1 專(zhuān)家系統(tǒng)總體結(jié)構(gòu)
基于模糊自尋優(yōu)控制的磨機(jī)運(yùn)行專(zhuān)家系統(tǒng)主要由用戶(hù)接口、推理機(jī)、知識(shí)庫(kù)、磨礦數(shù)據(jù)庫(kù)和智能控制器等部分組成,其結(jié)構(gòu)見(jiàn)圖3。
用戶(hù)接口為操作人員提供了良好的人機(jī)交互界面,用戶(hù)與系統(tǒng)的交互通過(guò)可選擇的多級(jí)菜單命令實(shí)現(xiàn),這些菜單命令構(gòu)成樹(shù)狀結(jié)構(gòu),用戶(hù)可以方便地進(jìn)入不同命令層。

圖3 磨機(jī)運(yùn)行專(zhuān)家系統(tǒng)結(jié)構(gòu)
推理機(jī)負(fù)責(zé)推理求解給定的評(píng)價(jià)問(wèn)題,從而完成由指定評(píng)價(jià)對(duì)象的輸入指標(biāo)到指定評(píng)價(jià)目標(biāo)的映射過(guò)程。推理機(jī)采用產(chǎn)生式規(guī)則作為知識(shí)的表達(dá)形式。
知識(shí)庫(kù)中存放著保證系統(tǒng)運(yùn)行的控制知識(shí)、各種評(píng)價(jià)原則下評(píng)價(jià)目標(biāo)同模糊自尋優(yōu)控制之間的匹配知識(shí)等。知識(shí)庫(kù)中的知識(shí)采用產(chǎn)生式規(guī)則表示。
磨礦數(shù)據(jù)庫(kù)用于存放已形成體系的評(píng)價(jià)對(duì)象的結(jié)構(gòu)化指標(biāo)屬性值,并按規(guī)定結(jié)構(gòu)進(jìn)行組織。
智能控制器包含模糊PID控制器和自尋優(yōu)控制器2部分,主要用于追蹤不斷漂移的磨機(jī)負(fù)荷最佳工作點(diǎn)。
3.2 專(zhuān)家系統(tǒng)的工作原理
基于模糊自尋優(yōu)控制的磨機(jī)運(yùn)行專(zhuān)家系統(tǒng)工作原理見(jiàn)圖4。
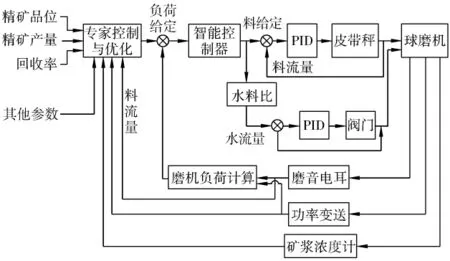
圖4 專(zhuān)家系統(tǒng)工作原理
操作人員通過(guò)用戶(hù)接口將期望指標(biāo)輸入,系統(tǒng)通過(guò)專(zhuān)家控制與優(yōu)化計(jì)算確定物料、水和鋼球等的參考量并組織生產(chǎn),控制系統(tǒng)然后通過(guò)對(duì)磨機(jī)的聲音和功率的監(jiān)測(cè)來(lái)計(jì)算推理出當(dāng)前磨機(jī)負(fù)荷,并完成反饋,同時(shí)礦漿濃度計(jì)將礦漿濃度信息實(shí)時(shí)地傳送回去,以便使專(zhuān)家系統(tǒng)作出評(píng)價(jià)和判斷,從而對(duì)物料、水和鋼球介質(zhì)的給定量進(jìn)行合理調(diào)整。
3.3 智能控制器的設(shè)計(jì)
智能控制器是該專(zhuān)家系統(tǒng)的關(guān)鍵組成部分,其整體結(jié)構(gòu)如圖5所示。該智能控制器將常規(guī)PID控制、模糊控制與自尋優(yōu)控制結(jié)合起來(lái),不僅發(fā)揮了常規(guī)PID控制穩(wěn)定性好、可靠性高的優(yōu)點(diǎn),而且模糊控制使得控制器的魯棒性大大增強(qiáng),自尋優(yōu)控制更是可以實(shí)時(shí)跟蹤磨機(jī)的負(fù)荷工作點(diǎn),使得磨機(jī)的負(fù)荷量始終保持在相對(duì)理想的區(qū)間。
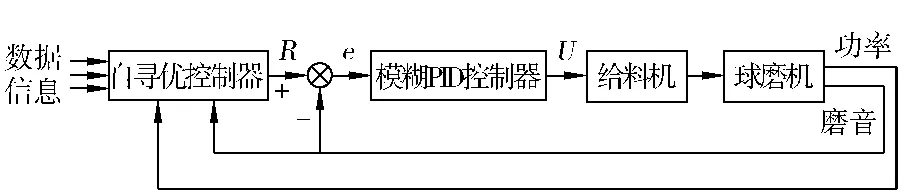
圖5 模糊自尋優(yōu)控制器
3.3.1 自尋優(yōu)控制的引入
自尋優(yōu)控制是在保證系統(tǒng)安全運(yùn)行的前提下,通過(guò)不斷改變負(fù)荷設(shè)定值,尋找出最大出力點(diǎn),從而使系統(tǒng)長(zhǎng)期保持在最佳出力區(qū)間[8]。假設(shè)某一時(shí)間磨機(jī)負(fù)荷的設(shè)定值為L(zhǎng),此時(shí)的給料量為M1,磨機(jī)負(fù)荷設(shè)定值增加1個(gè)步長(zhǎng)ΔL,那么新的磨機(jī)負(fù)荷設(shè)定值變?yōu)長(zhǎng)+ΔL,系統(tǒng)在新的磨機(jī)負(fù)荷設(shè)定值下穩(wěn)定運(yùn)行的給料量為M2,如果M2-M1>ε(ε表示無(wú)限接近于0的正數(shù)),則表明步進(jìn)方向正確;磨機(jī)負(fù)荷設(shè)定值繼續(xù)增加1個(gè)步長(zhǎng),如果M2-M1<ε,則表明步進(jìn)方向錯(cuò)誤,那么磨機(jī)負(fù)荷設(shè)定值就不能增加這一個(gè)步長(zhǎng),即表明磨機(jī)此時(shí)已達(dá)到最佳處理量區(qū)間。
3.3.2 模糊PID控制器的設(shè)計(jì)
單純依靠自尋優(yōu)控制方法會(huì)使磨機(jī)負(fù)荷的設(shè)定值為一個(gè)固定值,如果步長(zhǎng)太小,收斂速度則較慢;如果步長(zhǎng)太大,則會(huì)增大搜索損失,也可能會(huì)引起振蕩,造成系統(tǒng)的不穩(wěn)定[9]。將模糊PID控制與自尋優(yōu)控制結(jié)合起來(lái),可以實(shí)現(xiàn)磨機(jī)負(fù)荷設(shè)定值步長(zhǎng)的自動(dòng)改變。
模糊PID控制器主要包括模糊參數(shù)整定器和自適應(yīng)PID控制器2部分[10],其結(jié)構(gòu)如圖6所示。

圖6 模糊PID控制器
模糊參數(shù)整定器的輸入量偏差為e和偏差變化率為ec,初始輸出量為KPZ、KIZ和KDZ,最終輸出量為KP、KI和KD。e和ec首先經(jīng)過(guò)模糊推理,在此過(guò)程中,數(shù)據(jù)庫(kù)中輸入量和輸出量的模糊子集的隸屬度矢量值會(huì)提供給推理機(jī)相應(yīng)的數(shù)據(jù),推理機(jī)根據(jù)e和ec在不同階段對(duì)系統(tǒng)動(dòng)態(tài)特性的影響,歸納總結(jié)出模糊規(guī)則,接著由清晰化接口將模糊量轉(zhuǎn)化為控制輸出量,第N次采樣時(shí)的比例、積分和微分系數(shù)的校正值為ΔKP、ΔKI和ΔKD,然后再傳遞給自適應(yīng)PID控制器。模糊PID控制器會(huì)根據(jù)偏差的大小、方向和變化趨勢(shì)等特征,再結(jié)合被控對(duì)象的動(dòng)態(tài)特性,按照預(yù)期的控制要求,通過(guò)模糊規(guī)則做出相應(yīng)控制決策,對(duì)參數(shù)進(jìn)行在線(xiàn)調(diào)整。
參數(shù)KP、KI和KD自調(diào)整的計(jì)算式為

上述輸入量和輸出量的模糊子集均為{NB、NM、NS、ZE、PS、PM、PB},輸入量的論域?yàn)閧-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},輸出量的論域?yàn)閧-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7},隸屬度函數(shù)均為在論域范圍內(nèi)的三角函數(shù)。
在不同的e下,KP、KI和 KD的模糊規(guī)則為:當(dāng)|e|較大時(shí),為加快系統(tǒng)的響應(yīng)速度,應(yīng)取較大的KP,為避免系統(tǒng)出現(xiàn)較大的超調(diào),取KI=0,KD取值應(yīng)較小;當(dāng)|e|中等大小時(shí),應(yīng)取較小的KP,KI可適當(dāng)增加,但不應(yīng)過(guò)大,而對(duì)于KD則要根據(jù)系統(tǒng)的響應(yīng)速度適當(dāng)取值;當(dāng)|e|較小時(shí),為保證系統(tǒng)具有良好的穩(wěn)態(tài)性能,應(yīng)取較大的KP和KI,同時(shí)為避免系統(tǒng)在平衡點(diǎn)出現(xiàn)振蕩,KD的取值要適當(dāng)。
模糊自尋優(yōu)控制與一些傳統(tǒng)控制方法相比,只需要了解被控對(duì)象的時(shí)變特性,而并不需要建立具體的模型,并且所要尋找的最佳負(fù)荷點(diǎn)并不是一個(gè)固定值,也不是一個(gè)預(yù)測(cè)值,這個(gè)值是由實(shí)際生產(chǎn)所決定,在線(xiàn)實(shí)時(shí)搜索可得[11]。
3.4 磨機(jī)負(fù)荷控制策略
磨機(jī)負(fù)荷難以直接檢測(cè),磨機(jī)的振動(dòng)、磨音和磨機(jī)電流可以間接反應(yīng)磨機(jī)負(fù)荷的變化。當(dāng)磨機(jī)負(fù)荷較小時(shí),磨音主要來(lái)源于鋼球之間以及鋼球和襯板的摩擦、碰撞,聲音較大且頻率較高,聽(tīng)起來(lái)清脆;當(dāng)磨機(jī)負(fù)荷較大時(shí),磨音主要來(lái)源于物料和鋼球以及物料和襯板之間的摩擦、碰撞,聲音較小且頻率較低,聽(tīng)起來(lái)沉悶[12]。鑒于現(xiàn)場(chǎng)噪音的干擾,僅憑磨音判斷磨機(jī)負(fù)荷的準(zhǔn)確度較差,所以也將磨機(jī)電流考慮其中。這2個(gè)信號(hào)的變化可以較好地反映磨機(jī)負(fù)荷的變化。
由于各量之間為非線(xiàn)性關(guān)系,很難建立精確的數(shù)學(xué)模型,所以根據(jù)圖2將整個(gè)磨機(jī)運(yùn)行過(guò)程劃分為3個(gè)階段,這3個(gè)階段的各量之間可近似地看作是線(xiàn)性關(guān)系,這樣就可以建立起對(duì)應(yīng)階段的T—S模型,從而可以針對(duì)不同的階段選擇不同的控制策略[13-15]。
根據(jù)磨機(jī)的運(yùn)行狀態(tài)特征,可將磨機(jī)的運(yùn)行狀態(tài)分為以下5種情形:
(1)磨音清脆,磨機(jī)電流小,表明磨機(jī)處于欠磨運(yùn)行狀態(tài)。
(2)磨音較清脆,磨機(jī)電流較大,且磨機(jī)負(fù)荷呈上升趨勢(shì),表明磨機(jī)欠磨程度有所好轉(zhuǎn)。
(3)磨音約為61 dB,磨機(jī)電流大,表明磨機(jī)正常運(yùn)行,磨機(jī)負(fù)荷處在最佳區(qū)間。
(4)磨音沉悶,磨機(jī)電流較大,表明磨機(jī)飽磨運(yùn)行。
(5)磨音沉悶,磨機(jī)電流較小,表明磨機(jī)過(guò)飽磨運(yùn)行。
第3種情形時(shí),磨機(jī)的各項(xiàng)指標(biāo)均在圖2所示的Ⅱ區(qū)間內(nèi),所以常規(guī)PID控制即可滿(mǎn)足要求;一旦磨機(jī)出現(xiàn)欠磨或者飽磨時(shí),模糊自尋優(yōu)控制器將實(shí)時(shí)搜索判斷,專(zhuān)家系統(tǒng)會(huì)適當(dāng)加大或者減小給料量,從而盡快使得磨機(jī)重新回到正常運(yùn)行狀態(tài)。
4 專(zhuān)家系統(tǒng)的硬件和軟件
4.1 硬件配置
承德某選礦廠(chǎng)專(zhuān)家系統(tǒng)的硬件采用了西門(mén)子公司的S7-300PLC和工控機(jī)構(gòu)成了一個(gè)DCS系統(tǒng),其結(jié)構(gòu)如圖7所示。
該系統(tǒng)包括3層結(jié)構(gòu):
(1)生產(chǎn)管理層。該層主要面向廠(chǎng)領(lǐng)導(dǎo),通過(guò)廠(chǎng)內(nèi)以太網(wǎng),董事長(zhǎng)、總經(jīng)理和礦長(zhǎng)等可在辦公室了解現(xiàn)場(chǎng)情況。
(2)監(jiān)視操作層。該層主要包括作為服務(wù)器的工控機(jī)和中控室設(shè)備,操作人員在中控室通過(guò)計(jì)算機(jī)可監(jiān)視生產(chǎn)現(xiàn)場(chǎng)信號(hào)的變化并加以相應(yīng)操作,服務(wù)器負(fù)責(zé)層與層之間的通訊,同時(shí)該層記錄的數(shù)據(jù)可用于日后數(shù)據(jù)分析和系統(tǒng)故障分析。
(3)過(guò)程控制層。該層由2個(gè)S7-300PLC和6個(gè)ET200遠(yuǎn)程分站組成,一方面與中控室進(jìn)行通訊,另一方面還與現(xiàn)場(chǎng)設(shè)備相連接。
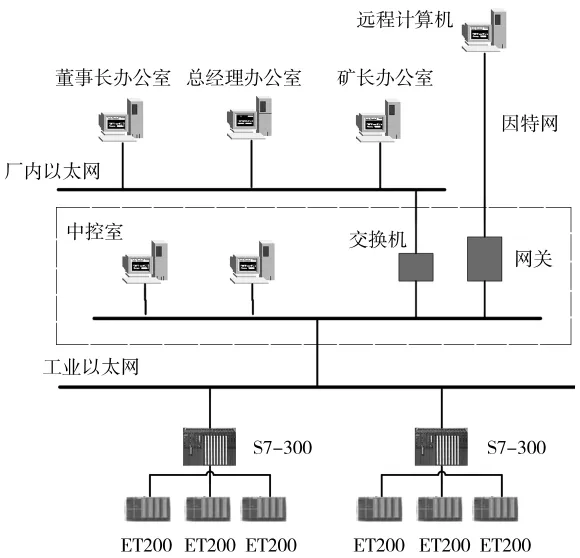
圖7 DCS系統(tǒng)
4.2 軟件設(shè)計(jì)
專(zhuān)家系統(tǒng)的軟件設(shè)計(jì)方面,上位機(jī)部分選用西門(mén)子公司的WINCC來(lái)完成人機(jī)界面的組態(tài),提供良好的用戶(hù)界面,其主界面如圖8所示。
操作人員可以通過(guò)“參數(shù)設(shè)定”來(lái)設(shè)置加水量、濃度和累積量清零等相關(guān)參數(shù);“磨機(jī)數(shù)據(jù)”可以顯示磨機(jī)實(shí)際負(fù)荷、礦漿濃度、電耳聲強(qiáng)等相關(guān)數(shù)據(jù)信息;“報(bào)警界面”和“趨勢(shì)界面”則可分別顯示報(bào)警出錯(cuò)的具體位置和整個(gè)磨礦分級(jí)系統(tǒng)運(yùn)行情況的歷史曲線(xiàn)。操作人員可以實(shí)時(shí)監(jiān)測(cè)球磨機(jī)的運(yùn)行狀況乃至整個(gè)磨礦分級(jí)作業(yè)的情況。
在軟件設(shè)計(jì)過(guò)程中,把整個(gè)軟件部分模塊化,這樣不僅方便調(diào)試,而且使軟件可以更好地維護(hù)。
5 應(yīng)用效果
該專(zhuān)家系統(tǒng)于2012年8月在承德某選礦廠(chǎng)進(jìn)行了安裝和調(diào)試,并投入試運(yùn)行。圖9是1#磨機(jī)系統(tǒng)的負(fù)荷運(yùn)行曲線(xiàn)。
從圖9可以看出,磨機(jī)負(fù)荷起初保持相對(duì)穩(wěn)定,當(dāng)人為加入5%的擾動(dòng)后,負(fù)荷量會(huì)出現(xiàn)波動(dòng),但經(jīng)過(guò)一段時(shí)間的調(diào)節(jié)后,負(fù)荷量又會(huì)穩(wěn)定在最初的給定值。在整個(gè)過(guò)程中,系統(tǒng)的各個(gè)參數(shù)變化平穩(wěn),無(wú)大幅波動(dòng),系統(tǒng)處于相對(duì)穩(wěn)定的運(yùn)行狀態(tài)。
試運(yùn)行情況表明,球磨機(jī)的臺(tái)時(shí)處理量提高了7%,生產(chǎn)成本降低了3%,同時(shí)徹底改變了該廠(chǎng)原先依靠工人24 h身處球磨機(jī)旁聽(tīng)磨音憑借經(jīng)驗(yàn)來(lái)判斷磨機(jī)負(fù)荷的境況,從而大大地改善了操作人員的工作環(huán)境,減輕了勞動(dòng)強(qiáng)度。
6 結(jié)語(yǔ)
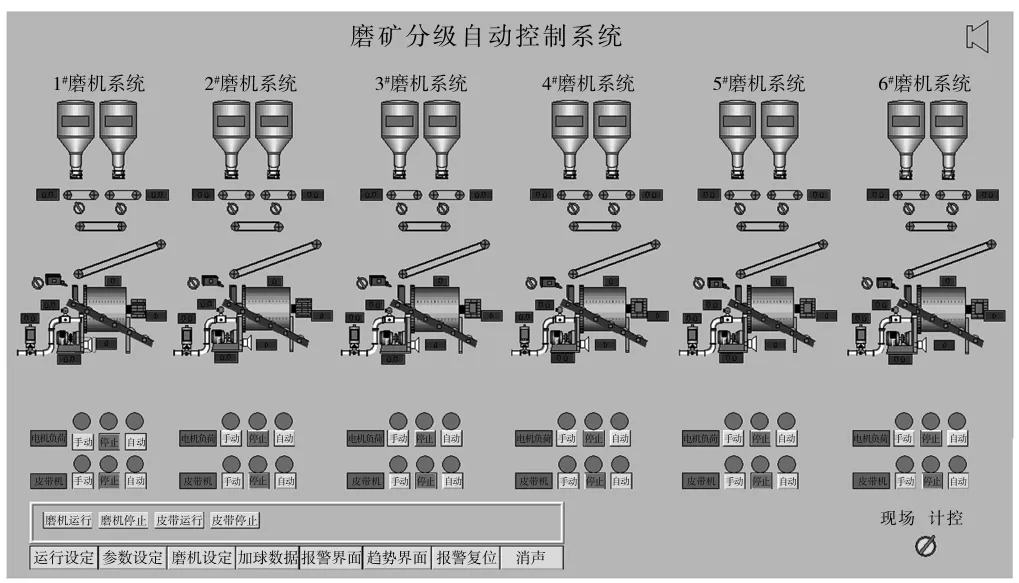
圖8 上位機(jī)主界面

圖9 磨機(jī)負(fù)荷運(yùn)行曲線(xiàn)
針對(duì)球磨機(jī)的大慣性滯后、時(shí)變性、非線(xiàn)性和難以建立精確模型等特點(diǎn),本研究提出了基于模糊自尋優(yōu)控制的專(zhuān)家系統(tǒng),該專(zhuān)家系統(tǒng)將模糊控制、自尋優(yōu)控制和常規(guī)PID控制技術(shù)結(jié)合起來(lái),構(gòu)成了兼容PLC和工控機(jī)的DCS系統(tǒng),通過(guò)控制優(yōu)化和系統(tǒng)結(jié)構(gòu)設(shè)計(jì)實(shí)現(xiàn)了穩(wěn)定可靠的控制目標(biāo)。承德某選礦廠(chǎng)的運(yùn)行效果表明,該專(zhuān)家系統(tǒng)在保證安全穩(wěn)定運(yùn)行的前提下達(dá)到了節(jié)能降耗的目的。
[1] 葛之輝,曾云南,趙保坤.選礦過(guò)程自動(dòng)檢測(cè)與自動(dòng)化綜述[J].中國(guó)礦山工程,2006,35(6):37-42.
[2] 周 平,柴天佑.磨礦過(guò)程磨機(jī)負(fù)荷的智能監(jiān)測(cè)與控制[J].控制理論與應(yīng)用,2008,25(6):1095-1098.
[3] 辛智娟.選礦自動(dòng)化的現(xiàn)狀與發(fā)展趨勢(shì)[J].金屬礦山,2008(9):76-78.
[4] 王豐雨,張 覃,黃宋魏.我國(guó)選礦自動(dòng)化評(píng)述[J].國(guó)外金屬礦選礦,2006(8):18-21.
[5] 周榮亮,張彥斌,崔棟剛,等.水泥磨負(fù)荷控制系統(tǒng)研究及應(yīng)用[J].控制工程,2003,10(6):518-520.
[6] 司剛?cè)瑥?蕊,劉建民,等.自尋優(yōu)—模糊自適應(yīng)采樣PI控制在鋼球磨煤機(jī)負(fù)荷控制中的應(yīng)用[J].熱力發(fā)電,2007(11):52-55.
[7] 張彥斌,賈立新,楊 波,等.自尋優(yōu)—模糊控制策略在球磨機(jī)控制中的實(shí)現(xiàn)[J].電力系統(tǒng)自動(dòng)化,1999,23(17):23-25.
[8] Jia L X,Li X Z.Self-optimization combined with fuzzy logic control for ball mill[J].International Journal of Computers,Systems and Signals,2000(2):231-239.
[9] 曹 暉,司剛?cè)瑥垙┍螅?基于ANFIS的自尋優(yōu)算法在磨機(jī)制粉系統(tǒng)中的應(yīng)用[C]∥中國(guó)儀器儀表學(xué)會(huì)第九屆青年學(xué)術(shù)會(huì)議論文集.天津:中國(guó)儀器儀表學(xué)會(huì),2007:149-152.
[10] 程 恒.模糊PID控制技術(shù)在磨礦系統(tǒng)中的應(yīng)用[J].礦山機(jī)械,2010,38(3):76-79.
[11] 韓 晉,栗國(guó)玉,魏 強(qiáng),等.球磨機(jī)控制系統(tǒng)的優(yōu)化[J].電力學(xué)報(bào),2005,20(2):186-189.
[12] 李 爭(zhēng),王建民.磨機(jī)負(fù)荷的磨音多頻帶檢測(cè)研究與開(kāi)發(fā)[J].儀器儀表用戶(hù),2008,15(5):22-23.
[13] 李慶亮,張新成,戚新波,等.基于模糊推理模型的水泥粉磨專(zhuān)家控制系統(tǒng)研究[J].微計(jì)算機(jī)信息,2006,22(6):79-81.
[14] 王永富,柴天佑.自適應(yīng)模糊控制理論的研究綜述[J].控制工程,2006,13(3):193-198.
[15] 曹 暉,張彥斌,司剛?cè)?基于自尋優(yōu)-采樣控制的火電廠(chǎng)磨機(jī)負(fù)荷控制系統(tǒng)的研究[J].工業(yè)控制計(jì)算機(jī),2006,19(11):15-16.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32