無刷直流電動機(jī)驅(qū)動控制電路的設(shè)計和實現(xiàn)
2013-10-31 06:54:02宰文姣
微特電機(jī) 2013年1期
宰文姣
(四川師范大學(xué),四川成都 610064)
0 引 言
無刷直流電動機(jī)是在有刷直流電動機(jī)的基礎(chǔ)上發(fā)展起來的一種新型電機(jī),它克服了傳統(tǒng)直流電動機(jī)的機(jī)械式換向器和電刷帶來的一系列限制,既具備交流電動機(jī)結(jié)構(gòu)簡單、運(yùn)行可靠、維護(hù)方便等優(yōu)點(diǎn),又具備直流電動機(jī)運(yùn)行效率高、無勵磁損耗及調(diào)速性能好等諸多特點(diǎn)[1]。無刷直流電動機(jī)的這些特點(diǎn)使其在計算機(jī)外圍設(shè)備、醫(yī)療器械、儀器儀表、化工、汽車、家電、輕紡、工業(yè)自動化等領(lǐng)域有廣闊的應(yīng)用前景和研究價值[2]。近30年來,隨著永磁新材料、微電子技術(shù)、自動控制技術(shù)及電力電子技術(shù),尤其是大功率開關(guān)器件的發(fā)展,無刷電動機(jī)得到了快速的發(fā)展[3],為了適應(yīng)小型直流電動機(jī)的驅(qū)動需求,很多半導(dǎo)體廠商推出了許多專用集成驅(qū)動芯片,一定程度上滿足了用戶的需求。但是,對于功率較大的無刷電動機(jī),不僅僅專用芯片相對較少,而且價格昂貴,同時也不便于二次開發(fā),因此其使用受到了很大的限制。采用分立器件,如場效應(yīng)管搭建H橋驅(qū)動電路,實現(xiàn)較大功率的無刷電動機(jī)的驅(qū)動控制顯得尤其重要。
1 系統(tǒng)的總體結(jié)構(gòu)及工作原理
無刷直流電動機(jī)控制系統(tǒng)主要由STC89C52單片機(jī)、IR2130前級驅(qū)動電路、三相逆變電路、無刷直流電動機(jī)及外圍電路構(gòu)成,系統(tǒng)的總體結(jié)構(gòu)框圖如圖1所示。
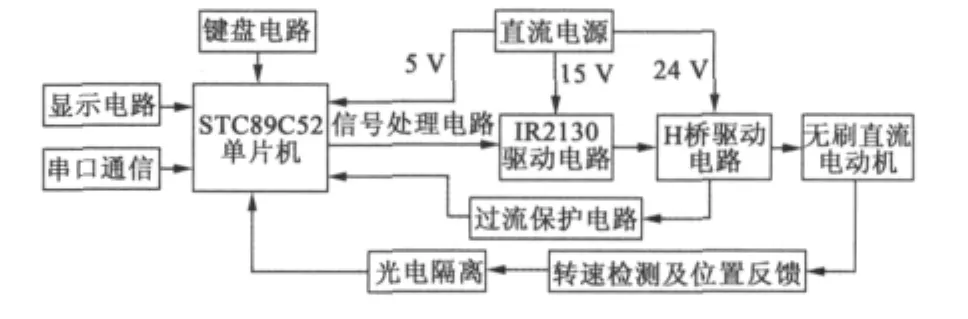
圖1 無刷直流電動機(jī)控制系統(tǒng)總體結(jié)構(gòu)框圖
系統(tǒng)的工作原理如下:圖1中STC89C52輸出信號經(jīng)信號處理電路產(chǎn)生6路控制信號以及PWM波通過控制集成芯片IR2130來間接控制三相逆變橋MOS管的兩兩開斷,從而實現(xiàn)無刷直流電動機(jī)的驅(qū)動。首先該系統(tǒng)通過人機(jī)接口設(shè)定目標(biāo)速度輸入到單片機(jī),然后該單片機(jī)通過轉(zhuǎn)換成對應(yīng)的PWM經(jīng)過信號處理電路去控制集成芯片IR2130,而該集成芯片的輸出通過合理選擇自舉器件,具有較好的自舉功能,迅速去控制三相逆變橋的兩兩開斷,以實現(xiàn)電機(jī)的驅(qū)動,同時為了系統(tǒng)的穩(wěn)定性以及提高系統(tǒng)的精度,該控制器采用了閉環(huán)設(shè)計,將實際速度利用反饋裝置檢測反饋到單片機(jī),并在單片機(jī)內(nèi)實現(xiàn)PID調(diào)速控制。另一方面還加入過流保護(hù)電路,進(jìn)一步提高系統(tǒng)穩(wěn)定性。
2 系統(tǒng)主要硬件模塊的設(shè)計
2.1 IR2130前級驅(qū)動電路
IR2130是MOS、IGBT功率器件專用柵級驅(qū)動芯片,其具有輸入信號為低電平有效且具有自舉功能,能同時驅(qū)動橋式電路中的低壓側(cè)和高壓側(cè)的功率元件。IR2130的外部電路設(shè)計關(guān)系到電路能否正常運(yùn)轉(zhuǎn)和H橋MOSFET管會不會發(fā)燙,是本控制系統(tǒng)的難點(diǎn)之一。IR2130是一款且具有自舉功能的H橋前級驅(qū)動芯片。其外圍電路設(shè)計如圖2所示。其中,本驅(qū)動控制系統(tǒng)的電源電壓選擇15 V,D1~D3為超快速恢復(fù)二極管,選用超快恢復(fù)二極管uf4007,避免頻率很大的尖峰波擊穿二極管而導(dǎo)致燒壞IR2130;C11~C13為自舉電容,為上橋臂功率管驅(qū)動的懸浮電源存儲能量,經(jīng)調(diào)試計算,本系統(tǒng)采用鉭電容效果最好,計算公式:
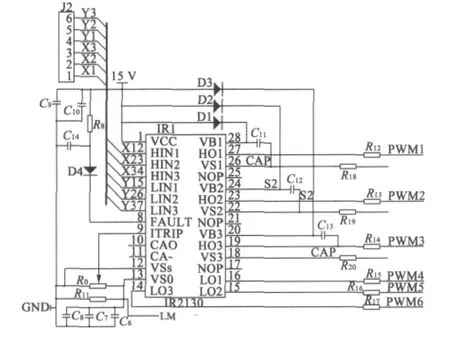
圖2 IR2130前級驅(qū)動電路
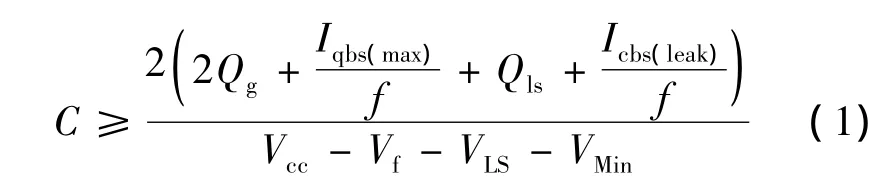
式中:Qg代表高端FET的門電荷;f代表工作頻率;ICbs(leak)代表自舉電容漏電流;Iqbs(max)代表 最大VBS靜態(tài)電流;VCC代表邏輯電路部分的電壓源;Vf代表自舉二極管的正向壓降;VLS代表低端FET或者負(fù)載上的壓降;VMin等于VB與VS之間的最小電壓;Ql代表每個周期的電平轉(zhuǎn)換所需要的電荷。
R12~R17用來防止功率管寄生震蕩,均選取20 Ω電阻,也可以選取大一點(diǎn)的電阻,可以減小;R18~R20的作用是在產(chǎn)生負(fù)電壓時起到限流作用,電阻值需要調(diào)試;LED為欠壓過流保護(hù)指示燈;R11為電流采樣電阻,取0.1 Ω;C6~C10為電路濾波電容,濾除LM 信號尖峰波;J2 為 HIN1、HIN2、HIN3、LIN1、LIN2、LIN3的信號輸入端,與單片機(jī)的 P2.0~P2.5電機(jī)換向輸出口經(jīng)74LS00和PWM相與非門及光電隔離后的信號相接。
2.2 H橋驅(qū)動電路設(shè)計
H橋驅(qū)動電路設(shè)計如圖3所示,其中,電源電壓取24 V;MOSFET管選用IRF540,該器件最高工作電壓為100 V,最大工作電流為28 A,最大功耗為150 W,內(nèi)部集成有續(xù)流二極管,所以本電路沒有畫二極管。D5為齊納二極管,起限壓作用,本電路采用P6KE24CA。C1~C3用來吸收直流母線上的尖峰電壓,取0.1 μF的瓷片電容,防止過高的母線電壓擊穿功率管;C4~C5用來對24 V的電源電壓濾波,取值為 100 μF/50 V 的極性電容和 0.47 μF 的CBB電容,確定濾波電容的方法是用示波器測試電源電壓,然后用示波器交流檔進(jìn)行耦合,峰值超過5 V時還需加入濾波電容,直到耦合后的峰值小于5 V時,停止加入濾波電容;R1~R6對驅(qū)動橋起保護(hù)作用,防止靜電燒毀功率MOSFET管,本電路取值為10 kΩ。J6為電機(jī)接口;J7為外加過流檢測接口,C15、C16為其濾波電容,分別取 0.1 μF 和 0.01 μF。

圖3 H橋驅(qū)動電路
2.3 電機(jī)的正反轉(zhuǎn)控制
無刷直流電動機(jī)換相采用單片機(jī)經(jīng)軟件而實現(xiàn),霍爾傳感器每檢測到一個位置時利用程序改變H逆變橋IRF540的導(dǎo)通順序,從而實現(xiàn)軟件換相。由于本無刷直流電動機(jī)系統(tǒng)采用的是兩兩導(dǎo)通控制法,所以電機(jī)每換一次相都有相對應(yīng)的兩個功率MOSEFT管導(dǎo)通,在位置霍爾傳感器每檢測到一次換相位置時利用單片機(jī)的P2口輸出控制信號。其電機(jī)兩兩導(dǎo)通正轉(zhuǎn)控制字如表1所示。
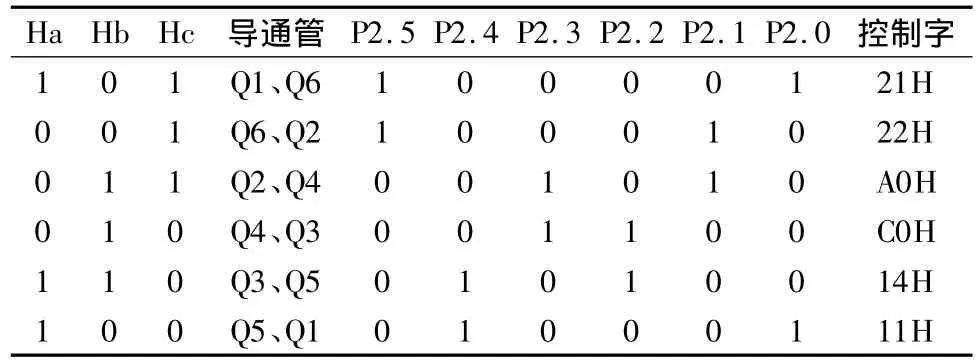
表1 兩兩導(dǎo)通方式控制字(正轉(zhuǎn))
電機(jī)兩兩導(dǎo)通反轉(zhuǎn)控制字如表2所示。
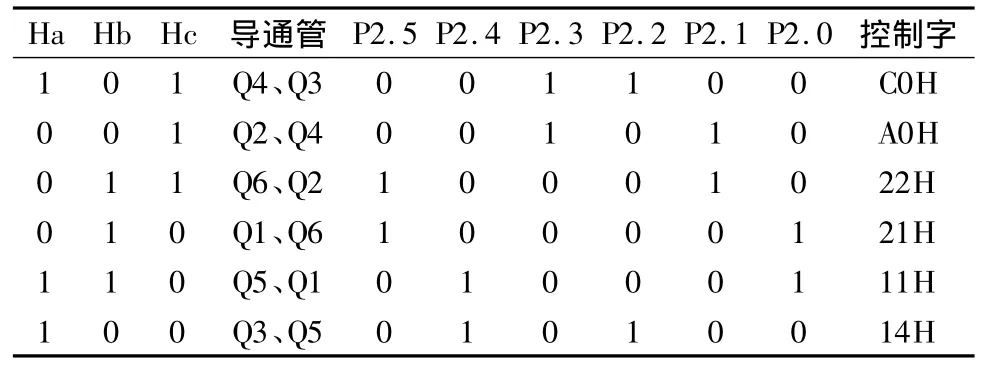
表2 兩兩導(dǎo)通方式控制字(反轉(zhuǎn))
2.4 測速電路的設(shè)計
測速原理如下:使用一個紅外對射管,發(fā)光管發(fā)出的紅外光如果不被遮擋則會直接照在接收管上,接收管是一光敏電阻,產(chǎn)生的結(jié)果是接收管的電阻變小,如果紅外光照越強(qiáng),接收管電阻愈小;反之,如果紅外光照越弱,則其電阻越大,當(dāng)發(fā)射管發(fā)出的光被遮擋后,接收管沒有紅外光照,電阻達(dá)最大。本系統(tǒng)采用碼盤實現(xiàn)紅外對射管的透光和遮光,碼盤如圖4所示。在碼盤兩邊安裝紅外對射管,電機(jī)轉(zhuǎn)動時帶動碼盤轉(zhuǎn)動,轉(zhuǎn)動到某一位置時紅外光線透過孔照射到接收管上,再下一個位置光線被擋住,接收管未收到紅外光,如此循環(huán),這樣通過接收管的接收狀態(tài)轉(zhuǎn)換成數(shù)字脈沖,對單位時間里的脈沖數(shù)進(jìn)行計數(shù)就可以檢測出其轉(zhuǎn)速快慢。
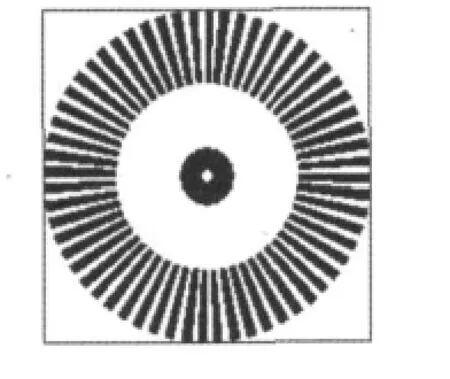
圖4 碼盤示意圖
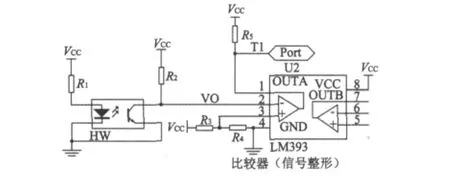
圖5 測速電路
其測速電路如圖5所示。圖5電路只適合于較低轉(zhuǎn)速的情況下,在電機(jī)高速旋轉(zhuǎn)式將會產(chǎn)生很大的測量誤差。主要原因在于接收管的阻值瞬變特性也就是其頻率特性,以及照射光線的頻率(此處的頻率體現(xiàn)為有光和無光的交替快慢程度),根據(jù)實際調(diào)試情況發(fā)現(xiàn)主要表現(xiàn)為低速和高速兩種頻率特性。低轉(zhuǎn)速情況下,接收管阻值隨紅外光源的變化及對應(yīng)的比較器反向端的輸入電壓分別如圖6、圖7所示。高速情況下,接收管阻值隨紅外光源的變化對應(yīng)的比較器反向端的輸入電壓分別如圖8、圖9所示。
通過實驗發(fā)現(xiàn),高速情況下比較電壓與比較器同相端輸入的參考電壓相近,比較器易誤判,從而輸出不正確的結(jié)果。為了避免這一現(xiàn)象,可將上圖的電壓信號進(jìn)行放大處理,再送入比較器判斷,最終輸出標(biāo)準(zhǔn)邏輯的脈沖信號。將以上電路進(jìn)行改進(jìn),對射管與放大電路連接,即P8與P7相連,P8是連接信號放大電路的接口,如圖10所示,圖11為信號放大電路。
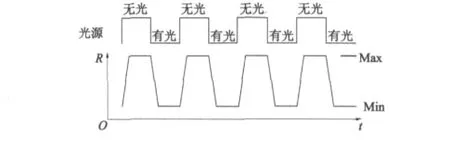
圖6 接收管阻值隨紅外光源的變化
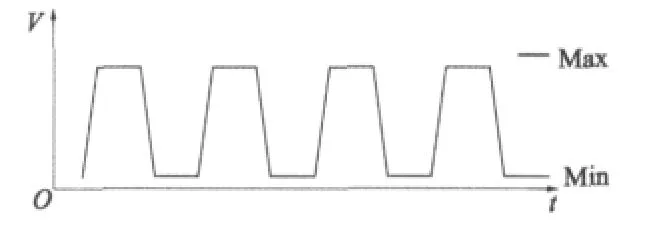
圖7 對應(yīng)的比較器反向端的輸入電壓

圖8 接收管阻值隨紅外光源的變化
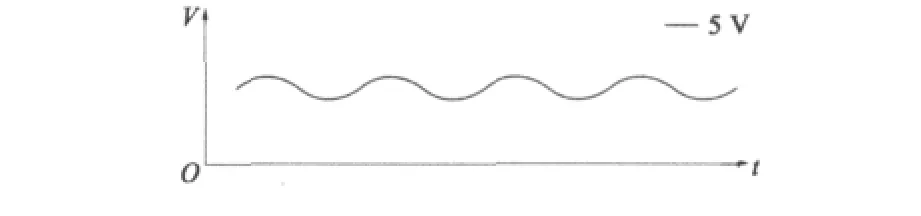
圖9 對應(yīng)的比較器反向端的輸入電壓
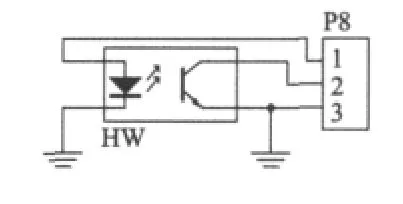
圖10 連接信號放大電路的接口
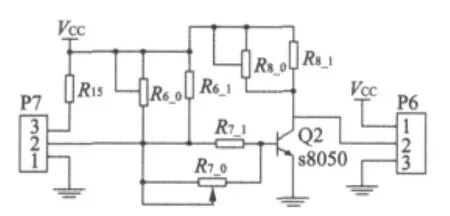
圖11 信號放大電路
R15是紅外發(fā)射管的限流電阻,阻值為330 Ω,R6_0和R6_1是與紅外接收管的串聯(lián)分壓的電阻,這樣做的目的在于調(diào)試過程中選取電位器R6_0來調(diào)試,調(diào)試到最佳狀態(tài)時再以等值或相近的固定電阻替換它,R7-0、R7_1和 R8_0、R8_1也是如此。改進(jìn)后的放大信號及比較器輸出的脈沖波形分別如圖12、圖13所示。
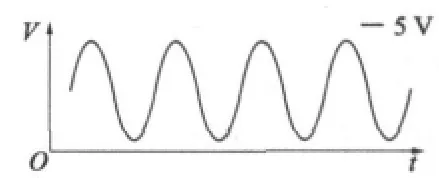
圖12 放大后的信號
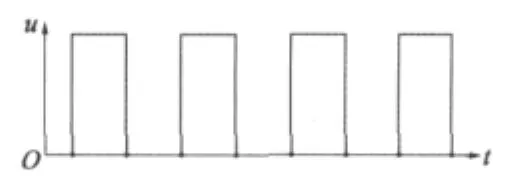
圖13 比較器比較輸出波形
將此脈沖信號送入單片機(jī)的計數(shù)器T1中,對其進(jìn)行計數(shù)。
2.5 PWM轉(zhuǎn)直流信號濾波電路
由于單片機(jī)輸出的PWM信號強(qiáng)度較弱,容易受負(fù)載的影響。所以選用一個三極管將其放大,為了使放大后的信號同樣是PWM數(shù)字信號,則必須使三極管工作在飽和和截止區(qū),取基極電阻R7=47 Ω。為了能使PWM信號濾波后在VOUT輸出端得到滿足要求的直流電壓,則必須合理選擇三極管的集電極電阻R4以及濾波電阻R5。由于在調(diào)試之前不好確定R4和R5的值,在設(shè)計電路時采取并聯(lián)一個精密電位器的方法,實際調(diào)試時不焊接R4和R5,而是用與之并聯(lián)的電位器R4_1、R5_1取代之,這樣通過調(diào)節(jié)電位器的大小使其在輸出端得到較理想的輸出,此時再測出電位器的值,將其拔掉,換上與之等值的固定電阻R4、R5,防止阻值被改變而影響效果。PWM轉(zhuǎn)直流信號濾波電路如圖14所示。
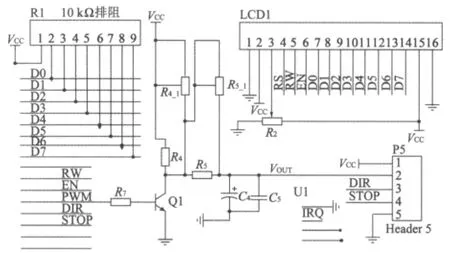
圖14 PWM轉(zhuǎn)直流信號濾波電路
2.6 過流保護(hù)電路設(shè)計
由于IR2130芯片自帶的過流檢測設(shè)計上有缺陷,在電源干擾過大時容易出現(xiàn)誤判,所以本電機(jī)系統(tǒng)采用LM393典型比較器進(jìn)行過流檢測,利用硬件和軟件共同對采樣電源濾波,達(dá)到消除因電源干擾而引起的誤判而導(dǎo)致驅(qū)動系統(tǒng)不能正常工作。圖15為電源過流保護(hù)電路設(shè)計。圖中,采用電位器R01進(jìn)行對比較電壓的設(shè)定,當(dāng)過流時OA輸出一個低電平,然后采用外部中斷INT1檢測。
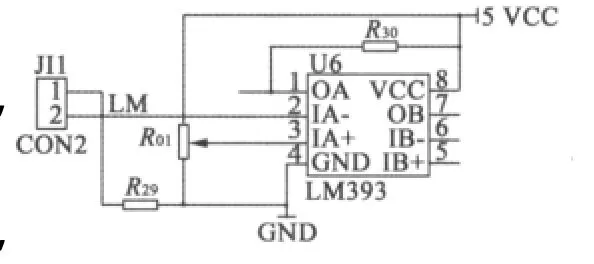
圖15 過流保護(hù)電路
3 系統(tǒng)的性能測試
通過硬件系統(tǒng)的調(diào)試和軟件算法的實現(xiàn),系統(tǒng)達(dá)到了良好的性能,其穩(wěn)定性較好,無論系統(tǒng)的起動、停止、加速、減速、以及帶負(fù)載的能力都能滿足現(xiàn)實的需要。系統(tǒng)經(jīng)過了48 h的連續(xù)運(yùn)行,實際測量轉(zhuǎn)速和系統(tǒng)顯示的轉(zhuǎn)速都基本吻合,而且誤差較小。其正反轉(zhuǎn)的速度變化曲線如圖16、圖17所示。
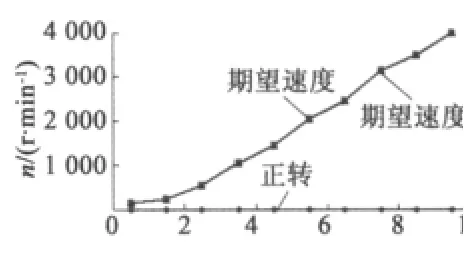
圖16 正轉(zhuǎn)速度曲線

圖17 反轉(zhuǎn)速度曲線
該系統(tǒng)調(diào)速范圍寬,低速可達(dá)150 r/min,正常運(yùn)行高速可達(dá)4000 r/min,并且通過PID算法調(diào)節(jié)后,誤差都能穩(wěn)定在5 r/min以內(nèi)。
4 結(jié) 語
針對較大功率的無刷電動機(jī)專用控制芯片相對較少,而且價格昂貴,同時也不便于二次開發(fā)的這一應(yīng)用不足,本文在研究無刷電動機(jī)運(yùn)行原理和工作特點(diǎn)的基礎(chǔ)上,采用分立器件搭建功率驅(qū)動電路,通過光電編碼盤實現(xiàn)轉(zhuǎn)速測量,研究并實現(xiàn)了較大功率的無刷直流電動機(jī)的驅(qū)動控制系統(tǒng),系統(tǒng)運(yùn)行魯棒性強(qiáng),速度精確,功耗小,實用性強(qiáng),非常適應(yīng)推廣到無刷電動機(jī)應(yīng)用的各種領(lǐng)域。
[1]李楠,田小玲,鐘灶生,等.基于鎖相環(huán)倍頻的BLDCM速度控制系統(tǒng)設(shè)計[J].傳感器與微系統(tǒng),2011,30(2):91 -94.
[2]王春民,喬瑞方,安海忠.基于DSP和IPM的三相無刷直流電機(jī)控制系統(tǒng)[J].吉林大學(xué)學(xué)報(信息科學(xué)版),2007,25(1):62-67.
[3]牛海清,謝運(yùn)祥.無刷直流電動機(jī)及控制技術(shù)的發(fā)展[J].微電機(jī),2002,35(5):36 -38.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
