一種基于超聲傳感器的三維坐標測量方法
2013-10-22 07:24:50單良,孔明,侯蕊,趙軍
傳感器與微系統 2013年6期
單 良,孔 明,侯 蕊,趙 軍
(1.中國計量學院信息工程學院,浙江杭州 310018;2.中國計量學院計量測試工程學院,浙江 杭州 310018)
0 引言
三維坐標檢測是現代生產、生活必不可少的檢測技術[1],其測量范圍涵蓋廣,既包含地球、城市等大尺度物體的三維測量[2,3],也包含飛機、船舶、建筑、汽車等中等尺度物體的三維檢測[4,5],同時,隨著納米工業的興起,三維坐標測量也已經進入納米尺寸時代[6]。根據測量對象的不同,其測量方法也各不相同,目前中等尺度檢測方法主要有三維坐標測量機[4,5]、激光跟蹤儀[7]、機器視覺坐標測量機[8]等,這些測量設備,成本高,不利于其大范圍的推廣使用。
本文在已有三維坐標檢測方法基礎上,提出一種采用超聲波測距的低成本三維測量方法,該方法采用超聲波發射端作為三維定位點,測量發射端到各接收端的距離,并利用最小二乘法三維坐標反演模型獲得發射端在測量空間的位置,該方法可以根據測量范圍配置不同數量的超聲波接收端,具有良好的擴展性,可以應用于倉儲定位、機器人導航定位、虛擬現實、模擬實戰游戲、無線傳感網絡定位等方面。
1 超聲波三維測量原理
最小的超聲波三維測量系統由1個超聲波發射端和3個超聲波接收端組成,檢測時,超聲波發射端發射超聲信號并進行計時,由超聲波接收端接收超聲信號并停止計時,根據超聲測距原理[9,10],通過計時器的時間計算獲得超聲波發射端到超聲波接收端的距離,當獲得發射端到3個以上接收端之間的距離時,就可以計算出發射端的空間位置。本文設計的實驗系統測量原理見圖1所示,由1個超聲波發射端點(X)和4個超聲波接收端點(A,B,C,D)組成。
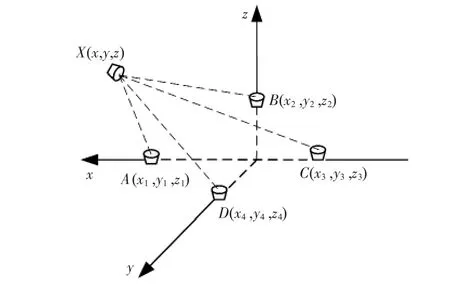
圖1 三維坐標測量示意圖Fig 1 Diagram of three-dimensional coordinate measurement
超聲波接收端點A,B,C,D的空間坐標為已知值(xi,yi,zi),超聲波發射端空間坐標是被測量(x,y,z),則超聲波發射端到4個接收端點的距離可表示為

式中li(i=1,2,3,…,n)為超聲波發射端到第i個超聲波接收端之間的距離。為求解式中的3個未知數,必須建立3個以上方程,當方程數超過3個時,求其最優解。
2 基于最小二乘法的三維坐標估計模型
超聲波三維坐標測量系統以FPGA作為核心處理單元,為了實現空間點位置的實時監控與測量,考慮FPGA中定位算法對邏輯單元的使用率和處理速度,本文在保證反演精度的情況下,提出采用基于最小二乘法的三維坐標反演模型,實現三維坐標計算。
為了便于反演算法的實現,對公式(1)兩邊進行平方,得距離方程的平方形式

為進行最小二乘估計,首先要將n個測量方程組線性化[7]。可采用相交圓弦線的方法進行線性化方程,將第2至n共n-1個測距方程分別減去第1個測距方程,可得到n-1個互不相關的線性方程

由最小二乘定義可知,最接近正確三維坐標的坐標值是在距離殘差和(此處為距離平方的殘差和)為最小的情況下得到的。對式(4)組成的方程組進行最小二乘估計,其正規方程可用矩陣形式表示為

其中
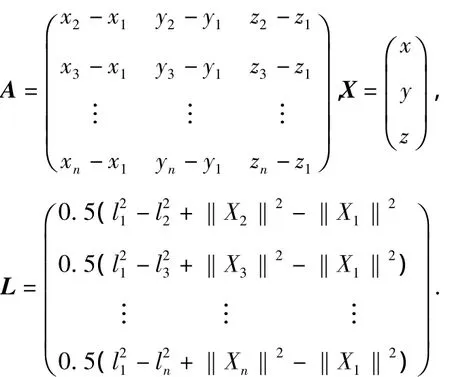
因此,可推導出坐標的估計值為

式(5)即為基于最小二乘法的三維坐標估計模型。
3 實驗
實驗裝置原理圖見圖2所示,為了便于實驗研究,采用2塊標準的孔板作為超聲波發射端和超聲波接收端,2塊孔板上各打5×5個通孔,每個通孔間距100 mm,超聲波發射端和超聲波接收端能正好固定于通孔中,2塊孔板中接收端的孔板固定,而發射端的孔板安裝在導軌上,可前后調節。以接收孔板中第3排第一個孔孔心作為坐標原點,孔板第3排孔心的連線為x坐標軸,孔板的垂線為y坐標軸,第1列孔心的連線為z坐標軸。
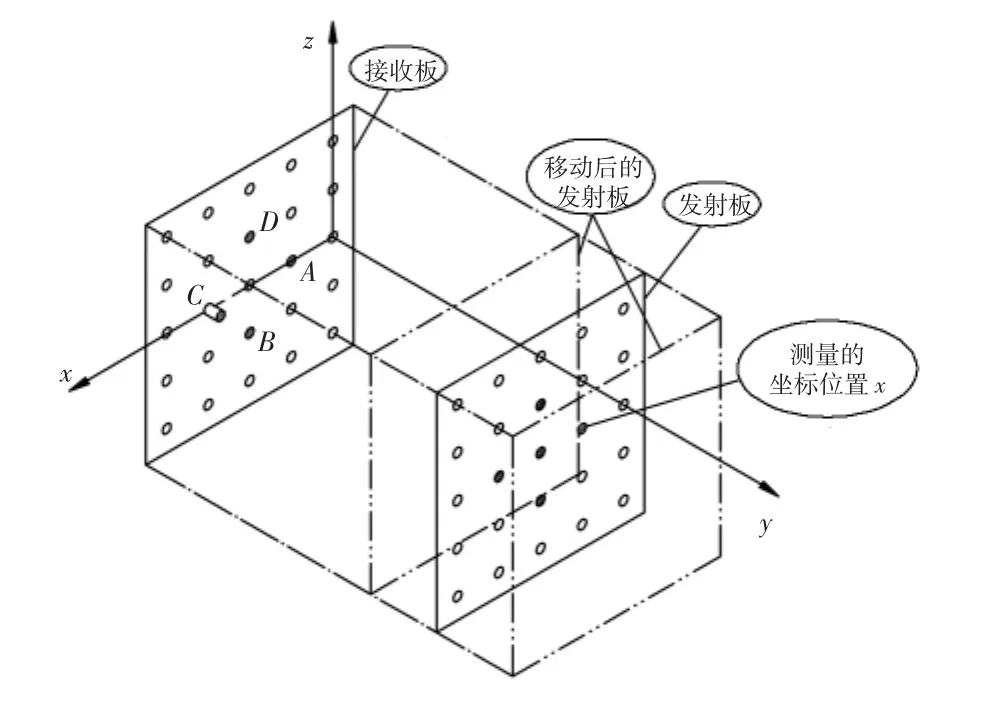
圖2 測量裝置簡圖Fig 2 Diagram of measuring device
把4個超聲波接收端安裝在A,B,C,D4個點,4個點的坐標為
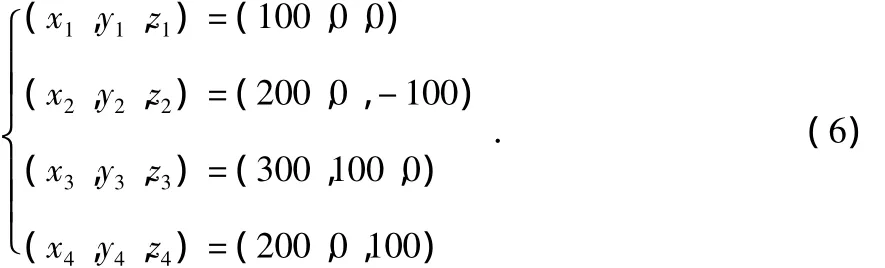
在不同y坐標的各5個位置安裝超聲波發射端,每個位置進行20次測量,以20次測量的平均值作為測量結果,見表1所示。
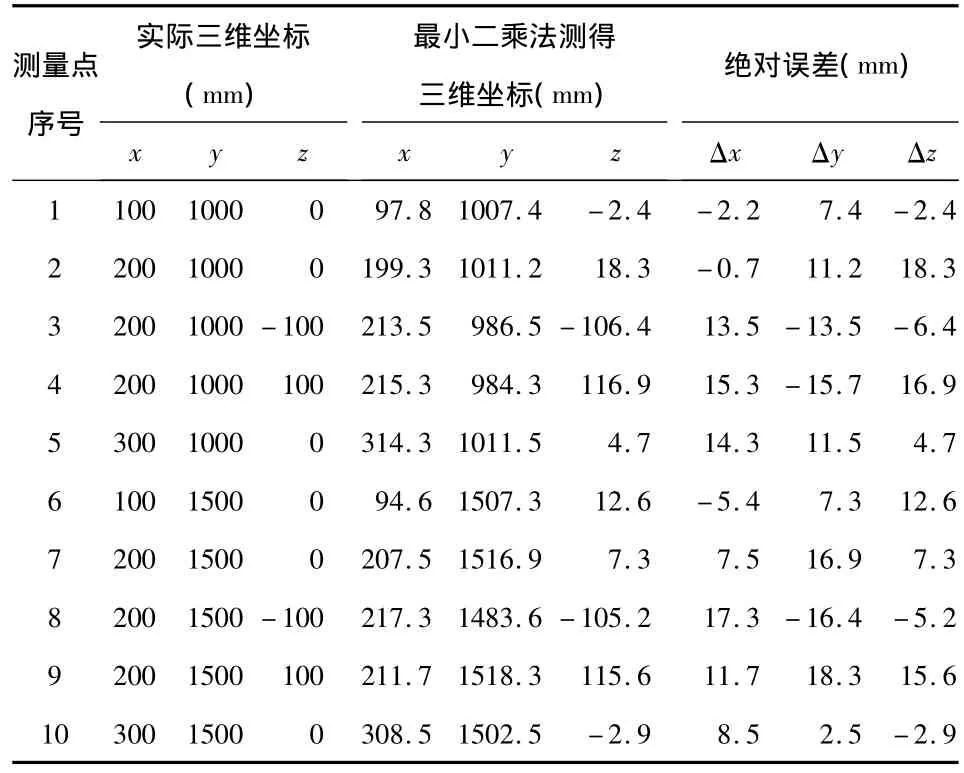
表1 三維坐標測量值與誤差分析Tab 1 Measurement values and error analysis of three-dimensional coordinate
由表1可知采用最小二乘三維反演算法對超聲波三維測量系統進行位置計算,計算結果x,y,z三軸的絕對誤差均小于20mm,對每個位置的20次重復測量進行分析,每個坐標上最大值和最小值之差不超過5 mm,因此,雖然絕對誤差較大,但是測量的重復性較好,可以通過誤差補償等方法實現更高精度的檢測。分析測量數據發現坐標測量定位誤差主要來源于收發機之間的角度引起的測距誤差,由于超聲波的衰減和傳播時間受距離和相對角度的影響,在三維坐標檢測中,必須要考慮角度誤差的補償,以實現更高精度的測量。
4 結論
本文提出了一種基于超聲傳感器的低成本三維坐標測量方法,該方法采用超聲波傳感器做為三維探測傳感器,根據一個發射端到多個接收端之間的距離實現空間三維坐標的反演,系統定位誤差小于20 mm,其主要誤差來源于收發機之間的角度引起的測距誤差,但重復性較好,系統精度有進一步提升的空間。同時系統具有成本低、可擴展性強等特點,具有廣泛的應用前景。
[1] 李廣云.工業測量系統最近進展及應用[J].測繪工程,2001,10(2):36-40.
[2] 王 剛,楊 強,李 強.GPS在三峽庫區開縣大榜8社滑坡監測中的應用[J].山西建筑,2011,37(2):197 -198.
[3] 姜雁飛,胡榮明,楊聯安.陀螺經緯儀在地理空間定向中的應用研究[J].西北大學學報,2011,41(1):145 -149.
[4] 周萬勇,鄒 方,薛貴軍,等.飛機翼面類部件柔性裝配五坐標自動制孔設備的研制[J].航空專用設備,2010(2):44-46.
[5] 王 昊.三坐標測量技術在汽車制造業中的應用[J].儀器儀表與檢測,2005(7):76-78.
[6] 王偉麗,范光照,程 方.新型納米級二維工作臺的參數測試[J].機械制造,2006,44(2):64 -67.
[7] 王金棟,郭俊杰,費致根.基于激光跟蹤儀的數控機床幾何誤差辨識方法[J].機械工程學報,2011,47(14):13 -19.
[8] 張雪飛,彭 凱,劉書桂.點陣式測頭成像視覺三坐標測量系統建模[J].工藝與監測,2007(3):103-105.
[9] Nakamura Shigeki,Sato Tomohiko,Sugimoto Masanori,et al.An accurate technique for simultaneous measurement of 3D position and velocity of a moving object using a single ultrasonic receiver unit[C]∥2010 International Conference on Indoor Position and Indoor Navigation(IPIN),2010:1 -7.
[10] Francesc Fiorenzo,Maisano Domenico.Ultrasound transducers for large-scale metrology:A performance analysis for their use by the MScMS[J].IEEE Transactions on Instrumentation and Measurement,2010,59(1):110 - 121.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
