壓電式精密驅動器及其閉環控制系統設計*
2013-10-22 07:24:00楊志剛
傳感器與微系統 2013年5期
蘇 江,劉 鵬,楊志剛
(1.吉林大學珠海學院機電工程系,廣東 珠海 519041;2.吉林大學 機械科學與工程學院,吉林長春 130025)
0 引言
近年來,隨著微/納米技術的迅猛發展,人們紛紛開展對新型驅動技術的研究,新型驅動技術大致可分為兩類[1]:一類是利用場力驅動,如電磁力、靜電力等;另一類是運用材料本身的性能變化產生的微小變形來驅動,尤其以壓電材料、磁滯伸縮材料和形狀記憶合金材料制成的驅動裝置研究最為廣泛。壓電驅動技術利用壓電材料的逆壓電效應,即壓電材料在電場作用下產生機械變形的特性實現驅動,具有位移分辨率高、定位精度好、響應速度快、易于微型化等優點[2,3]。利用壓電驅動技術開發研究的壓電驅動器采用摩擦力驅動,將阻礙運動的摩擦力變為驅動力,有可能成為MEMS最有前途的驅動器。壓電驅動器在超精密加工、生物醫學工程、半導體及微電子數據存儲、光學、光纖度量技術、精密機械等領域,具有極其廣泛的應用前景[4~9]。本文設計了以壓電疊堆作為驅動源的直線式精密驅動器,為了改善驅動器的穩定性,采用閉環反饋控制的方法來補償步距誤差,以此來提高驅動器運行的穩定性。
1 壓電步進式精密驅動器結構與原理
本文采用整體柔性鉸鏈與壓電疊堆相配合的機械結構,設計了一種新型的直線步進驅動器。其組成部分有:箝位機構、驅動機構、調整機構、動子及導軌。圖1為步進式驅動器的三維裝配圖。箝位機構是將壓電疊堆伸長而產生的力傳遞到動子的傳動機構,箝位力的大小決定了驅動器驅動力和承載能力的大小。驅動機構是利用驅動疊堆的驅動力并通過箝位機構的配合帶動動子運動的機構,驅動疊堆安裝在動子結構外部,通過與箝位機構配合實現對動子的驅動。調整機構是與柔性鉸鏈配合使用的,主要的作用是在壓電疊堆的變形方向上提供可調的位移量,從而對壓電疊堆的預緊力、箝位面與箝位力作用面之間配合間隙等方面實現最佳的調整。動子是依賴導軌導向和箝位機構來實現定位的。動子在工作過程中,要求在水平導軌中平穩運動,導軌的加工精度對動子的運動方向有很大影響,是保證動子運動的關鍵因素。
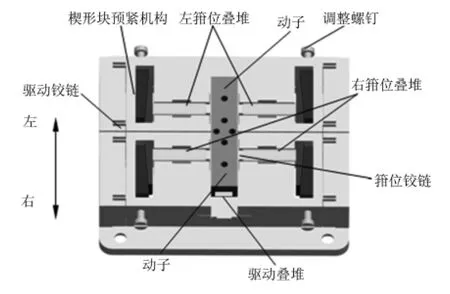
圖1 驅動器的整體結構圖Fig 1 Overall structure diagram of actuator
驅動器初始工作時,其左右箝位疊堆處于加壓箝位狀態以保持動子的承載能力。步進直線步進驅動器工作原理為:當驅動器向左驅動時,左箝位疊堆保持箝位,右箝位疊堆自由,然后驅動疊堆加壓伸長,推動箝位驅動復合體的前后活動部分向兩側均勻分開,從而左箝位疊堆帶動動子向前驅動了1/2的驅動疊堆伸長量;右箝位疊堆箝位,左箝位疊堆自由,驅動疊堆失電縮短,復合體依靠鉸鏈的回復力前后活動部分向中間收縮,右箝位疊堆通過柔性鉸鏈箝住動子又向左移動1/2的驅動疊堆伸長量;左箝位疊堆箝位,同時右箝位疊堆保持箝位。這樣,驅動器完成了向前的一步驅動。驅動器不斷重復上述的驅動過程,從而實現動子向前的連續步進運動。同理,只要交換左右箝位疊堆箝位的先后順序,驅動器就會連續得向右運動。
2 步距與步距穩定性測試
2.1 試驗系統組成
試驗測試的組成如圖2所示,首先在PC機上,通過LabVIEW軟件編制驅動器所需的3路控制信號,通過NI數據采集卡輸出3路模擬信號,然后這3路控制信號分別通過功率放大器和壓電陶瓷電源放大,得到驅動器所需的實際電壓信號,按照一定的時序控制驅動器運動,同時激光測微儀適時讀取驅動器的位移信號,并把位移信號轉換成電壓信號,送入傅立葉分析儀進行分析和顯示,直觀、方便地對數據進行讀取和處理。
2.2 步距與步距穩定性與電壓關系曲線
驅動器的運動步距(簡稱步距)指驅動器在穩定工作狀態下,動子在一個時序周期內運動的距離。在同方向進給的前提下,采集一定步數內連續工作的具體的步距數值,驅動器步距穩定性通過公式(1)計算獲得
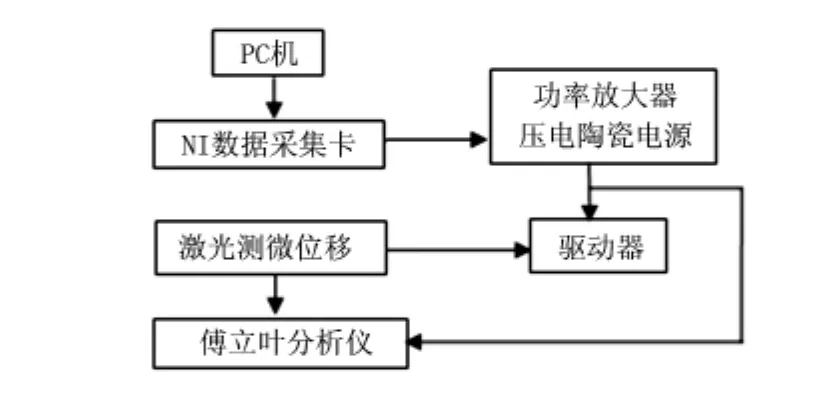
圖2 試驗測試系統原理圖Fig 2 Principle diagram of experimental testing system

式中 ηs為驅動器步距穩定性;Si為驅動器的實際步距為驅動器進給n步的步距平均值;n為驅動器的進給的步數。
頻率1 Hz時步距與驅動電壓關系曲線如圖3所示。由圖3可以看出:驅動器的步距與電壓間的具有良好的線性關系。尤其是隨著驅動電壓的增大,線性關系越好。
步距穩定性與驅動電壓關系曲線如圖4所示。從圖4可以看出:高驅動電壓時,驅動器運行的穩定性要好于低驅動電壓。步距穩定性的變化過程不是線性的。驅動電壓由90V向50V降低時,步距穩定性的變化比較緩慢,即驅動器保持較好的步距穩定性。驅動電壓在50~4 V范圍內變化時,步距穩定性的變化明顯加劇,說明驅動器受摩擦等外界因素的影響比重明顯加大了。
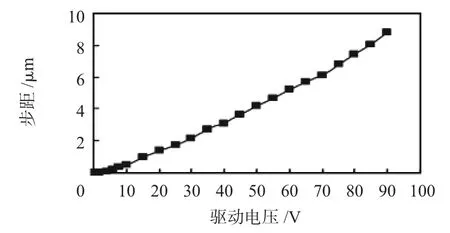
圖3 步距—驅動電壓特性曲線Fig 3 Step distance vs driving voltage characteristic curve
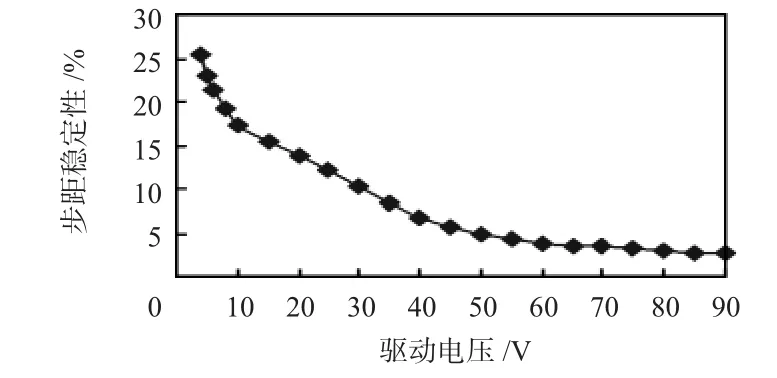
圖4 步距穩定性—驅動電壓特性曲線Fig 4 Stability of step distance vs driving voltage characteristic curve
3 基于LabVIEW的驅動器閉環反饋控制系統的設計
以上對驅動器的試驗研究都是基于開環控制的,經試驗發現,雖然驅動器的步距能夠達到0.05 μm,但是存在步距誤差,尤其是在小驅動電壓下運行,誤差明顯增大。當驅動器空載時,在最小驅動電壓下,步距的穩定性為25%。步距的穩定性是衡量驅動器性能好壞的一個重要指標。為了改善驅動器的步距穩定性,本文采用閉環反饋控制的方法,來補償步距誤差,以此來提高驅動器運行的穩定性。
3.1 驅動器閉環控制系統的基本思想
閉環控制主要目的就是要提高驅動器步距穩定性,實現精確定位,閉環控制的基本思想如圖5所示。在驅動器工作前,預先設定要達到的目標位移S,在相應的驅動電壓下運動,通過傳感器適時采集當前的實際輸出位移S1,并送入控制系統,控制系統將實際位移同目標位移作比較,判斷ΔS(ΔS=S-S1)是否滿足,相應的判斷條件,如果不滿足,則再次給驅動器相應的驅動電壓信號,驅動器繼續運動,經過多次的采集、比較,直到ΔS滿足了相應的判斷條件,驅動器最終停止在目標位置。

圖5 閉環控制基本思想Fig 5 Basic idea of closed-loop control
3.2 控制系統的工作原理
控制系統工作原理如圖6所示,包括PC機、10 MHz帶寬功率放大器、壓電陶瓷專用電源、PCI—6229NI數據采集卡、LC—2400激光測微儀、CB—68LP型號的端子板以及若干條標準電纜。
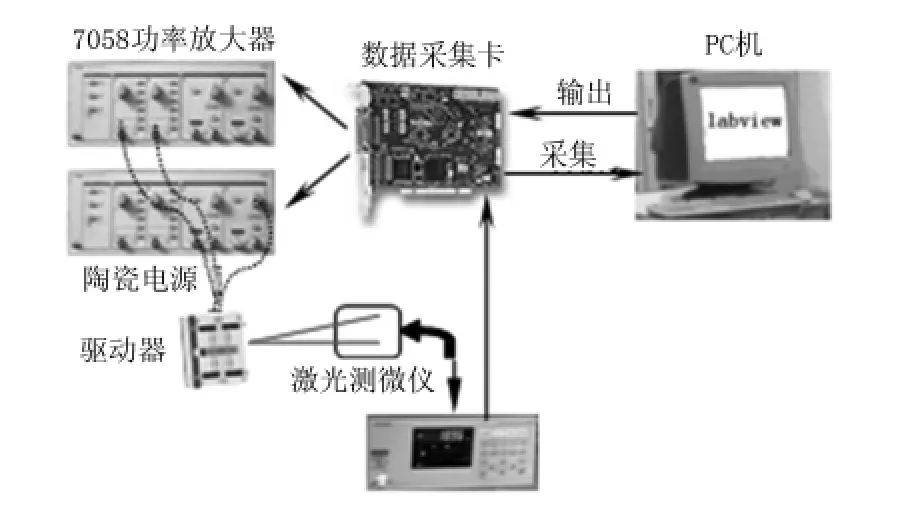
圖6 閉環控制系統原理Fig 6 Principle of closed-loop control system
基于虛擬儀器LabVIEW軟件的開發平臺,在PC機上編制驅動器閉環控制程序,通過調用數據采集卡DAQ驅動程序,使數據采集卡產生3路模擬電壓信號。這3路電壓信號通過便于信號輸出和輸入的端子板CB—68LP分別連接到功率放大器和壓電陶瓷專用電源上,電壓信號得到放大,同時驅動步進驅動器運動。同時激光測微儀對動子的運動位移進行實時跟蹤測量,并將測得的位移信號轉換成電壓信號,再通過端子板CB—68LP把位移電壓信號傳遞給數據采集卡,數據采集卡采集到電壓信號,再將此電壓信號轉換成控制程序識別的數字信號。控制系統將對反饋回來的數據進行分析,根據一定的控制規則進行判斷,然后再次調用DAQ驅動程序,使數據采集卡產生所需要的驅動電壓信號(2路箝位電壓信號始終保持不變)。從而對驅動機構的運動進行控制。通過這種方法,實現了對驅動機構的閉環反饋控制。
3.3 定位停止閉環控制系統
閉環反饋控制系統流程如圖7所示。控制過程分為2個部分:快速運動和慢速運動。首先讓驅動器在較大驅動電壓下快速接近快速運動時的目標位置S0,當到達一定的閾值范圍內,改變驅動電壓讓其在小驅動電壓下慢速運動,經過循環和反復比較,直至到達最終目標位置S后停止。例如:要求驅動器在100 μm的位置停止,先讓其快速運動到95 μm,然后再以小步距移動到最終目標位置。
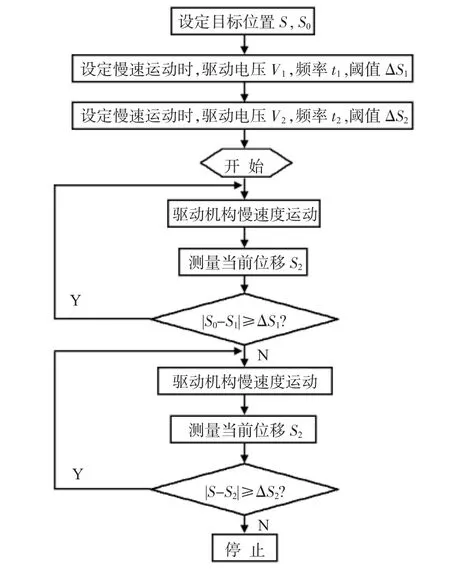
圖7 閉環控制系統流程圖Fig 7 Flow chart of closed-loop control system
3.4 定位停止控制系統試驗測試
對所設計的閉環反饋定位停止控制系統進行了試驗測試,并且和開環定位停止進行了比較。以50V驅動電壓下,運動20步時為例,此時步長為4.1 μm,如果在理想條件下,20步能夠運行82 μm,讓驅動器運動20步后記錄下位移值,再讓其在閉環控制系統下運行。為了對比,取最終目標位置為82μm,快速運動時,目標位置為75μm,電壓為40V,頻率為10Hz;慢速運動時,設定電壓4V,頻率是5Hz。快速閾值設為0.5 μm,慢速運動閾值是 0.1 μm。分別測試了10組開環和閉環定位停止試驗數據,如表1所示。
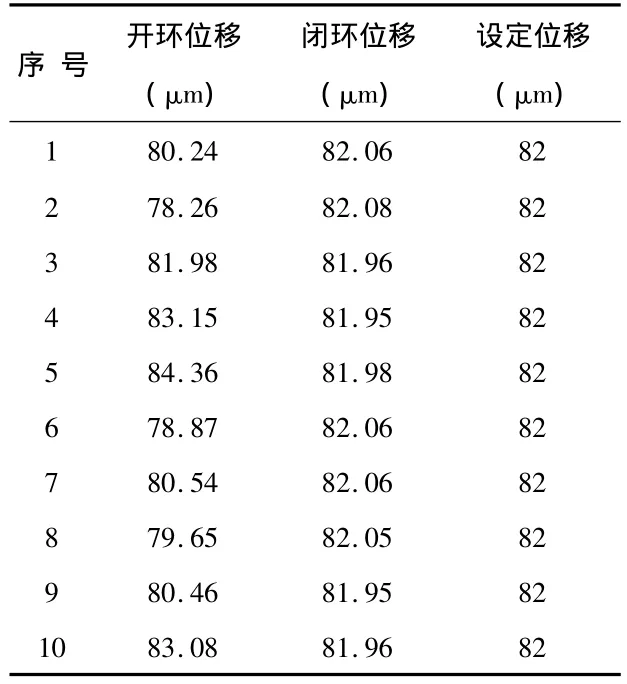
表1 開環與閉環測試對比數據Tab 1 Testing contrast data of open-loop and closed-loop
當使用開環定位停止時,定位停止誤差比較大,甚至達到了mm級,這是由于驅動器運行過程中每步都存在步距誤差,經過累積后,定位誤差就會很大了。如果使用閉環定位停止系統,其定位精度可達到0.06 μm,大大提高了驅動器的定位停止精度。
4 結束語
以電壓疊堆為驅動源,設計并制作了一種步進直線精密驅動器,為了克服開環控制下驅動器存在的步距誤差,使用LabVIEW設計了驅動器閉環反饋控制系統,試驗表明:驅動器步距與電壓具有良好的線性關系,定位精度高,可達到0.06 μm,工作穩定性好。該驅動器在精密控制領域具有廣泛的應用前景。
[1] 葉云岳.現代驅動技術綜述[J].電機技術,2005(1):3-7.
[2] 程院蓮,鮑 紅.壓電陶瓷應用研究進展[J].中國測試技術,2005,31(2):12 -14.
[3] Jang Lingsheng,Yu Yungchiang.Peristaltic micropump system with piezoelectric actuators [J].Microsyst Technol,2008,14:241-248.
[4] 畢樹生,宗光華.微操作機器人系統的研究開發[J].中國機械工程,1999,10(9):1024 -1027.
[5] Choi S B,Han S S,Lee Y S.Fine motion control of a moving stage using a piezoactuator associated with a displacement amplifier[J].Institute of Physics Publishing,2005,14(1):222 -230.
[6] 李榮彬,杜 雪,張志輝,等.光學微結構的超精密加工技術[J].納米技術與精密工程,2003,1(1):57 -61.
[7] 周志斌,肖沙里,周 宴,等.現代超精密加工技術的概況及應用[J].現代制造工程,2005(1):121-123.
[8] Nah S K,Zhong Z W.A micro-gripper using piezoelectric actuation for micro-object manipulation[J].Sensors and Actuators,2006,133(1):218 -224.
[9] 范尊強,劉建芳.壓電疊堆泵驅動的精密步進電機[J].中國電機工程學報,2010,30(15):106 -111.
[10] 侯國屏,王 坤.LabVIEW 7.1編程與虛擬儀器設計[M].北京:清華大學出版社,2004.