多無(wú)人機(jī)系統(tǒng)支持的潛艇協(xié)同作戰(zhàn)應(yīng)用研究*
2013-10-16 08:05:46程相東馮金富杜文紅
艦船電子工程 2013年2期
程相東 馮金富 杜文紅
(空軍工程大學(xué) 西安 710038)
1 引言
潛艇具有隱蔽性好,突擊能力強(qiáng)的優(yōu)點(diǎn),可長(zhǎng)期潛伏在水下,具有較強(qiáng)的突擊作戰(zhàn)能力[1]。但潛艇在執(zhí)行作戰(zhàn)任務(wù)時(shí),主要依靠自身偵查設(shè)備獲取戰(zhàn)場(chǎng)信息,這些設(shè)備作用距離較近,使用時(shí)易暴露目標(biāo),使?jié)撏ё鲬?zhàn)半徑受到限制[2]。為提升潛艇作戰(zhàn)效能,潛艇應(yīng)當(dāng)融入戰(zhàn)場(chǎng)信息網(wǎng)絡(luò),具備與空天地形成一體化的協(xié)同作戰(zhàn)(CE,Cooperative Engagement)能力。
協(xié)同作戰(zhàn)是指戰(zhàn)斗群中各戰(zhàn)斗單元以極短的延時(shí)共享其他單元獲取的目標(biāo)信息,發(fā)射武器對(duì)目標(biāo)進(jìn)行攻擊,協(xié)同抵御各目標(biāo)的威脅[3]。隨著自主式水下航行器[4](Autonomous Underwater Vehicle,AUV)的發(fā)展,尤其是潛射無(wú)人機(jī)(Submarine-launched Unmanned Aerial Vehicles,SUAV)的出現(xiàn),使得這些無(wú)人平臺(tái)與潛艇協(xié)同執(zhí)行作戰(zhàn)任務(wù)成為可能。
2 無(wú)人機(jī)支持潛艇協(xié)同作戰(zhàn)的數(shù)據(jù)鏈體系結(jié)構(gòu)
潛艇在執(zhí)行作戰(zhàn)任務(wù)時(shí),無(wú)人機(jī)可作為一種場(chǎng)外傳感器為其提供所需的戰(zhàn)場(chǎng)信息。無(wú)人機(jī)可在敵反潛體系外發(fā)射,具有體積小、隱身性能好、航程遠(yuǎn)的特點(diǎn)[2]。其機(jī)載設(shè)備可覆蓋較廣的區(qū)域,可擴(kuò)大潛艇的搜索范圍,延長(zhǎng)預(yù)警時(shí)間,提升潛艇的戰(zhàn)場(chǎng)感知能力。建立潛艇與無(wú)人機(jī)間的信息鏈接,是潛艇能否實(shí)現(xiàn)與空中單元協(xié)同作戰(zhàn)的關(guān)鍵。
數(shù)據(jù)鏈?zhǔn)乾F(xiàn)代信息技術(shù)與戰(zhàn)術(shù)理念相結(jié)合的產(chǎn)物,是為了適應(yīng)機(jī)動(dòng)條件下作戰(zhàn)單元共享戰(zhàn)場(chǎng)態(tài)勢(shì)和實(shí)時(shí)指控的需求,采用標(biāo)準(zhǔn)化消息格式、高效組網(wǎng)協(xié)議、保密抗干擾數(shù)字信道而構(gòu)成的一種戰(zhàn)術(shù)信息系統(tǒng)[5]。以實(shí)現(xiàn)協(xié)同作戰(zhàn)為前提,以提升作戰(zhàn)效能為需求,數(shù)據(jù)鏈可將潛艇與無(wú)人機(jī)平臺(tái)鏈接起來(lái)形成一個(gè)有機(jī)整體。支持潛艇協(xié)同作戰(zhàn)的數(shù)據(jù)鏈體系結(jié)構(gòu)如圖1所示。
2.1 數(shù)據(jù)鏈裝備
數(shù)據(jù)鏈裝備是數(shù)據(jù)鏈功能和技術(shù)的物化載體。為實(shí)現(xiàn)戰(zhàn)場(chǎng)信息和控制指令的收發(fā),無(wú)人機(jī)以及潛艇等數(shù)據(jù)鏈節(jié)點(diǎn)應(yīng)裝載數(shù)據(jù)鏈裝備,它的一般工作過(guò)程是:數(shù)據(jù)處理系統(tǒng)將無(wú)人機(jī)獲取的戰(zhàn)場(chǎng)信息轉(zhuǎn)換為數(shù)據(jù)鏈標(biāo)準(zhǔn)格式,經(jīng)過(guò)接口處理轉(zhuǎn)換后,由端機(jī)按照組網(wǎng)通信協(xié)議處理,最后通過(guò)數(shù)據(jù)鏈終端完成發(fā)送;接收方(可以為一個(gè)或多個(gè))由其端機(jī)接收到信號(hào)后,由端機(jī)按組網(wǎng)通信協(xié)議進(jìn)行接收處理,在經(jīng)過(guò)接口處理及轉(zhuǎn)換后,由數(shù)據(jù)處理系統(tǒng)進(jìn)行格式化消息的解讀。
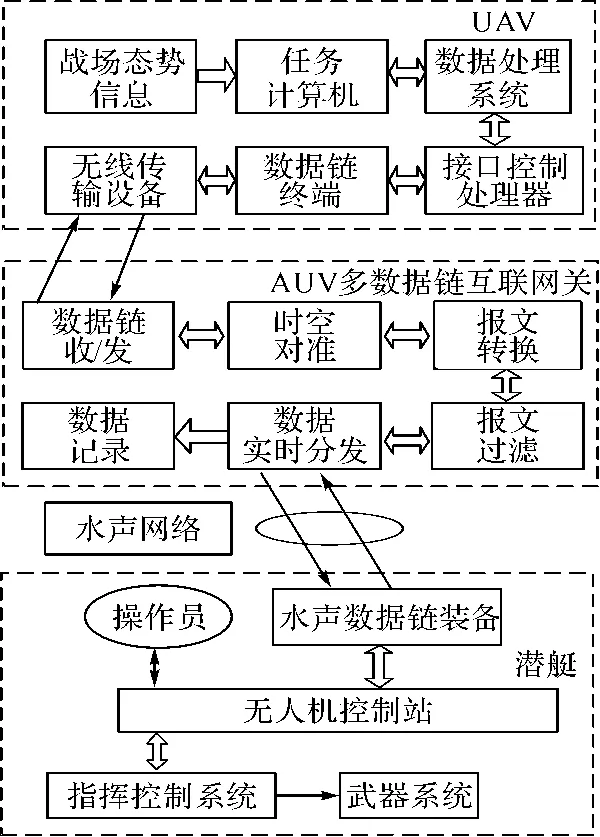
圖1 多數(shù)據(jù)鏈互聯(lián)體系結(jié)構(gòu)
2.2 水聲網(wǎng)絡(luò)
水聲網(wǎng)絡(luò)是基于聲信號(hào)的無(wú)線通信網(wǎng)絡(luò),由水聲數(shù)據(jù)鏈將水下節(jié)點(diǎn)(包括AUV、潛艇、水下傳感器節(jié)點(diǎn)等)有機(jī)聯(lián)合,是戰(zhàn)場(chǎng)信息在水下空間的傳輸鏈路[6]。水聲數(shù)據(jù)鏈可使?jié)撏г诎踩疃韧瓿赏ㄓ崳员WC潛艇戰(zhàn)場(chǎng)生存能力和對(duì)敵打擊的突然性。
2.3 AUV多數(shù)據(jù)鏈互聯(lián)網(wǎng)關(guān)
潛艇與無(wú)人機(jī)之間的信道涉及海水和大氣兩種傳輸介質(zhì),導(dǎo)致兩者之間存在多種數(shù)據(jù)鏈互聯(lián)互操作問(wèn)題[7]。AUV多數(shù)據(jù)鏈互聯(lián)網(wǎng)關(guān)起到“翻譯器”的作用,支持不同種類數(shù)據(jù)鏈終端的接入,主要實(shí)現(xiàn)報(bào)文格式轉(zhuǎn)換、報(bào)文過(guò)濾、時(shí)空對(duì)準(zhǔn)、沖突消解和狀態(tài)監(jiān)視等功能。
2.4 無(wú)人機(jī)控制站
無(wú)人機(jī)控制站是潛艇實(shí)現(xiàn)對(duì)無(wú)人機(jī)控制的一套軟硬件組件,在提供高效的無(wú)人機(jī)信息分發(fā)管理的同時(shí),與指揮控制系統(tǒng)共享戰(zhàn)場(chǎng)態(tài)勢(shì)信息,直接支持作戰(zhàn)單元的作戰(zhàn)行動(dòng)。
3 無(wú)人機(jī)控制站設(shè)計(jì)
3.1 控制站功能
借鑒以支持和實(shí)現(xiàn)聯(lián)合無(wú)人機(jī)作戰(zhàn)概念為主要目標(biāo)的美國(guó)國(guó)防部(DOD)戰(zhàn)術(shù)控制系統(tǒng)[8](Tactical Control System,TCS),無(wú)人機(jī)控制站的作用在于對(duì)無(wú)人機(jī)戰(zhàn)術(shù)任務(wù)的控制。具體功能如下:
1)實(shí)現(xiàn)無(wú)人機(jī)與潛艇作戰(zhàn)指揮控制系統(tǒng)間的互聯(lián)互通;
2)根據(jù)需要調(diào)整無(wú)人機(jī)姿態(tài)與航路,支持任務(wù)規(guī)劃與指揮控制功能;
3)戰(zhàn)場(chǎng)信息融合及戰(zhàn)場(chǎng)態(tài)勢(shì)生成;
4)無(wú)人機(jī)載荷狀態(tài)的監(jiān)視與管理。
3.2 控制站功能邏輯結(jié)構(gòu)
無(wú)人機(jī)控制站是鏈接無(wú)人機(jī)平臺(tái)和作戰(zhàn)指揮系統(tǒng)的橋梁,貫穿于作戰(zhàn)任務(wù)的全過(guò)程。無(wú)人機(jī)控制站接受作戰(zhàn)任務(wù)后將任務(wù)分解為無(wú)人機(jī)載荷任務(wù)和通信任務(wù),并完成無(wú)人機(jī)平臺(tái)的航路規(guī)劃;在戰(zhàn)術(shù)任務(wù)執(zhí)行過(guò)程中,監(jiān)視無(wú)人機(jī)載荷和數(shù)據(jù)鏈工作狀態(tài),接收多無(wú)人機(jī)系統(tǒng)傳回的戰(zhàn)場(chǎng)信息,融合處理后生成戰(zhàn)場(chǎng)態(tài)勢(shì)圖像,若有需要也可對(duì)任務(wù)進(jìn)行重規(guī)劃;戰(zhàn)術(shù)任務(wù)完成后,分析任務(wù)執(zhí)行情況提交任務(wù)完成報(bào)告。無(wú)人機(jī)控制站采用基于接口的模塊化設(shè)計(jì),圖2為功能邏輯結(jié)構(gòu)圖。
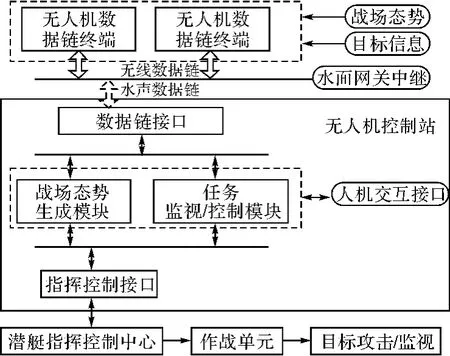
圖2 無(wú)人機(jī)控制站功能邏輯結(jié)構(gòu)
數(shù)據(jù)鏈接口提供標(biāo)準(zhǔn)的信息格式,實(shí)現(xiàn)無(wú)人機(jī)控制站與無(wú)人機(jī)之間的互通;人機(jī)交互接口通過(guò)控制面板實(shí)現(xiàn)操作員與無(wú)人機(jī)控制站的互動(dòng);指揮控制接口提供連接情報(bào)信息層、指令層、應(yīng)用層的橋梁,可使?jié)撏е笓]控制系統(tǒng)接收并分析戰(zhàn)場(chǎng)態(tài)勢(shì)信息和目標(biāo)狀態(tài)信息,支持作戰(zhàn)單元對(duì)目標(biāo)的打擊與監(jiān)視。
4 多無(wú)人機(jī)系統(tǒng)描述
4.1 多無(wú)人機(jī)系統(tǒng)功能需求
多無(wú)人機(jī)系統(tǒng)(multi-UAV system)是指構(gòu)成多無(wú)人機(jī)系統(tǒng)的無(wú)人機(jī)、控制站以及其它實(shí)體之間邏輯上和物理上的信息關(guān)系、控制關(guān)系和時(shí)空分布模式[9]。多無(wú)人機(jī)系統(tǒng)需要通信鏈路的支持,應(yīng)當(dāng)具備一定的智能性與自主性。根據(jù)戰(zhàn)術(shù)任務(wù)的不同,多無(wú)人機(jī)系統(tǒng)功能應(yīng)滿足如下需求:
1)自組織能力。由于操作員數(shù)量有限,以及應(yīng)對(duì)通信中斷等突發(fā)情況,多無(wú)人機(jī)系統(tǒng)應(yīng)具備一定的自組織能力;
2)交互性。與無(wú)人機(jī)控制站的交互可使多無(wú)人機(jī)系統(tǒng)獲得戰(zhàn)術(shù)任務(wù)的授權(quán)與確認(rèn);
3)支持動(dòng)態(tài)任務(wù)。針對(duì)不斷變化的戰(zhàn)場(chǎng)態(tài)勢(shì),多無(wú)人機(jī)系統(tǒng)可根據(jù)無(wú)人機(jī)控制站指令完成戰(zhàn)術(shù)任務(wù)重規(guī)劃;
4)開(kāi)放性。當(dāng)系統(tǒng)成員因戰(zhàn)斗損失或故障退出時(shí),或者有其他成員加入時(shí),系統(tǒng)能夠保持正常運(yùn)行。
4.2 多無(wú)人機(jī)系統(tǒng)工作流程
多無(wú)人機(jī)系統(tǒng)的工作流程是無(wú)人機(jī)平臺(tái)在通信鏈路的保障下,實(shí)現(xiàn)戰(zhàn)場(chǎng)信息共享及協(xié)作完成戰(zhàn)術(shù)任務(wù)的協(xié)同過(guò)程[11]。多無(wú)人機(jī)系統(tǒng)工作流程如圖3所示,數(shù)據(jù)鏈支持多無(wú)人機(jī)系統(tǒng)的信息交互與指令接收。其中信息流是對(duì)戰(zhàn)場(chǎng)環(huán)境的感知與理解,指令流是無(wú)人機(jī)控制站所下達(dá)的指令信息。
4.2.1 態(tài)勢(shì)生成模塊
多無(wú)人機(jī)平臺(tái)接受無(wú)人機(jī)控制站預(yù)裝訂任務(wù)后活動(dòng)在指定區(qū)域,利用自身傳感器完成戰(zhàn)場(chǎng)態(tài)勢(shì)的初步生成并不斷更新戰(zhàn)場(chǎng)態(tài)勢(shì)。戰(zhàn)場(chǎng)態(tài)勢(shì)具體包括目標(biāo)信息,地圖和地形數(shù)據(jù)采集、氣象數(shù)據(jù)采集、態(tài)勢(shì)評(píng)估、威脅估計(jì)、態(tài)勢(shì)理解等,這些初步的戰(zhàn)場(chǎng)態(tài)勢(shì)信息需要傳回?zé)o人機(jī)控制站,進(jìn)一步處理后生成近實(shí)時(shí)的戰(zhàn)場(chǎng)態(tài)勢(shì)圖像。
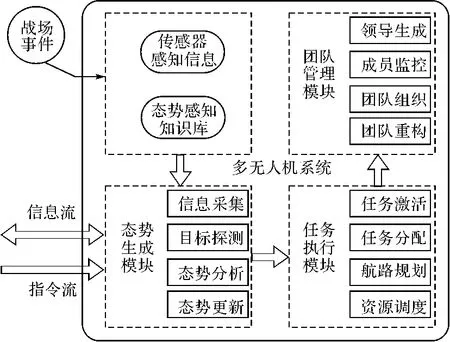
圖3 多無(wú)人機(jī)系統(tǒng)工作流程
4.2.2 任務(wù)執(zhí)行模塊
無(wú)人機(jī)控制站通過(guò)數(shù)據(jù)鏈現(xiàn)場(chǎng)激活任務(wù),多無(wú)人機(jī)系統(tǒng)對(duì)任務(wù)進(jìn)行分解與細(xì)化完成任務(wù)分配;通過(guò)航路規(guī)劃與資源調(diào)度,在滿足戰(zhàn)術(shù)任務(wù)需求的前提下,合理配置多無(wú)人機(jī)系統(tǒng)資源,實(shí)現(xiàn)不同無(wú)人機(jī)平臺(tái)傳感器及其他設(shè)備功能上的互補(bǔ)式配置。
4.2.3 團(tuán)隊(duì)管理模塊
團(tuán)隊(duì)管理模塊是將多無(wú)人機(jī)系統(tǒng)分成若干呈遞階結(jié)構(gòu)的無(wú)人機(jī)團(tuán)隊(duì)和子團(tuán)隊(duì),是對(duì)戰(zhàn)術(shù)任務(wù)細(xì)化后的具體執(zhí)行。團(tuán)隊(duì)由團(tuán)隊(duì)領(lǐng)導(dǎo)和普通成員組成,是自上而下的分層式結(jié)構(gòu),團(tuán)隊(duì)領(lǐng)導(dǎo)協(xié)調(diào)成員行為并負(fù)責(zé)團(tuán)隊(duì)公共事務(wù)的統(tǒng)一管理,并完成與上下級(jí)無(wú)人機(jī)團(tuán)隊(duì)的通信和指令下達(dá)。
4.2.4 對(duì)水面目標(biāo)攻擊的協(xié)同作戰(zhàn)應(yīng)用研究
潛艇協(xié)同多無(wú)人機(jī)系統(tǒng)對(duì)水面目標(biāo)攻擊是一種時(shí)域、空域與頻域協(xié)同的典型作戰(zhàn)行為,作戰(zhàn)任務(wù)想定如圖4所示。作戰(zhàn)步驟如下:
1)節(jié)點(diǎn)t1:無(wú)人機(jī)控制站接收岸基/潛艇指控中心或其他上級(jí)所下達(dá)的任務(wù)后,初步裝訂戰(zhàn)術(shù)任務(wù),調(diào)試水面AUV網(wǎng)關(guān),建立與多無(wú)人機(jī)系統(tǒng)的水聲/無(wú)線數(shù)據(jù)鏈鏈接,部署多無(wú)人機(jī)系統(tǒng)至巡航區(qū)域;
2)節(jié)點(diǎn)t2:無(wú)人機(jī)控制站監(jiān)控?zé)o人機(jī)平臺(tái)航行、任務(wù)載荷及戰(zhàn)術(shù)數(shù)據(jù)鏈狀態(tài),并搜集戰(zhàn)場(chǎng)態(tài)勢(shì)信息,由無(wú)人機(jī)控制站處理融合后生成戰(zhàn)場(chǎng)態(tài)勢(shì)圖像;

圖4 典型作戰(zhàn)任務(wù)想定圖
3)節(jié)點(diǎn)t3:無(wú)人機(jī)控制站對(duì)多無(wú)人機(jī)系統(tǒng)下達(dá)指令激活作戰(zhàn)任務(wù),根據(jù)多無(wú)人機(jī)系統(tǒng)對(duì)作戰(zhàn)任務(wù)的分解與細(xì)化,由若干無(wú)人機(jī)團(tuán)隊(duì)有效協(xié)作執(zhí)行,并將目標(biāo)信息與戰(zhàn)場(chǎng)環(huán)境信息傳回?zé)o人機(jī)控制站。多無(wú)人機(jī)系統(tǒng)團(tuán)隊(duì)協(xié)作體系結(jié)構(gòu)如圖5所示;

圖5 協(xié)同任務(wù)分配體系結(jié)構(gòu)
4)節(jié)點(diǎn)t4:決策者下達(dá)攻擊決策完成目標(biāo)打擊。攻擊決策是一個(gè)動(dòng)態(tài)的過(guò)程,需要對(duì)戰(zhàn)場(chǎng)態(tài)勢(shì)的不斷決策,保證戰(zhàn)場(chǎng)信息的完備性、準(zhǔn)確性與時(shí)效性,以獲得最大的作戰(zhàn)效能;
5)節(jié)點(diǎn)t5、節(jié)點(diǎn)t6:攻擊完成后,多無(wú)人機(jī)系統(tǒng)及時(shí)將戰(zhàn)損評(píng)估信息傳回?zé)o人機(jī)控制站,最后返航至預(yù)定區(qū)域降落回收。
5 結(jié)語(yǔ)
為實(shí)現(xiàn)多無(wú)人機(jī)系統(tǒng)與潛艇的協(xié)同作戰(zhàn),本文設(shè)計(jì)了無(wú)人機(jī)控制站功能邏輯結(jié)構(gòu),探討分析了基于戰(zhàn)術(shù)任務(wù)的多無(wú)人機(jī)系統(tǒng)戰(zhàn)場(chǎng)功能實(shí)現(xiàn),最后從實(shí)際作戰(zhàn)使用出發(fā),給出了一種較為典型的協(xié)同作戰(zhàn)模式,并分析其作戰(zhàn)流程。從文中可看出,潛艇與無(wú)人機(jī)平臺(tái)的信息交互是實(shí)現(xiàn)潛艇協(xié)同作戰(zhàn)的關(guān)鍵,下一步應(yīng)重點(diǎn)研究潛艇協(xié)同作戰(zhàn)信息時(shí)效性需求以及典型作戰(zhàn)模式的詳細(xì)戰(zhàn)術(shù)信息分發(fā)流程。
[1]侯博,蔣峰.潛空導(dǎo)彈作戰(zhàn)效能研究[J].海軍航空工程學(xué)院學(xué)報(bào),2010,25(1):101-104.
[2]譚紅明,鄧海強(qiáng).潛射無(wú)人機(jī)發(fā)展現(xiàn)狀及其關(guān)鍵技術(shù)[J].南京航空航天大學(xué)學(xué)報(bào),2009,41(12):1-5.
[3]胡洪寧,周德超,劉忠.基于水聲傳感器網(wǎng)絡(luò)的隱蔽協(xié)同攻擊模式研究[J].計(jì)算機(jī)與數(shù)字工程,2011,29(11):85-88.
[4]綦輝,蔡云祥,宋裕農(nóng).基于UUV支持的水下協(xié)同作戰(zhàn)研究[J].火力與指揮控制,2009,34(3):96-101.
[5]李宏智.戰(zhàn)術(shù)數(shù)據(jù)鏈的發(fā)展與作戰(zhàn)應(yīng)用[J].艦船電子工程,2010,30(4):1-5.
[6]佟盛,張信學(xué).美軍水下網(wǎng)絡(luò)中心戰(zhàn)技術(shù)發(fā)展及設(shè)想[J].艦船科學(xué)技術(shù),2009,31(2):154-158.
[7]曹方方,劉衛(wèi)東,李娟麗.基于水下網(wǎng)絡(luò)的多UUV協(xié)同作戰(zhàn)效能評(píng)估[J].計(jì)算機(jī)測(cè)量與控制,2011,19(6):1397-1402.
[8]王林,張慶杰.支持聯(lián)合作戰(zhàn)的UAS通用地面控制站研究[J].系統(tǒng)仿真學(xué)報(bào),2008,20(22):6171-6175.
[9]袁利平,陳宗基.一種新型多無(wú)人機(jī)系統(tǒng)體系結(jié)構(gòu)的設(shè)計(jì)[J].系統(tǒng)仿真學(xué)報(bào),2008,22(22):6137-6141.
[10]胡洪寧,周德超,劉忠,等.基于水聲傳感器網(wǎng)絡(luò)的隱蔽協(xié)同攻擊模式研究[J].計(jì)算機(jī)與數(shù)字工程,2011,39(11).
[11]姚宗信,李明,陳宗基.多機(jī)協(xié)同作戰(zhàn)任務(wù)決策方法多智能體結(jié)構(gòu)框架[J].電光與控制,2008,15(3):1-4.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
